An Introduction to Programming using entity-component-systems & existence-based processing in rust
written by Bjorn Madsen updated: 2026-06-21
Read online: Codeberg · GitHub Pages
Clone source (the public default branch is the rendered book; the runnable code lives on
main):
git clone --branch main https://codeberg.org/root-11/intro-book.git
or
git clone --branch main https://github.com/root-11/intro-book.git
This book teaches programming from first principles of data-oriented design, entity-component-systems (ECS), and existence-based processing (EBP). It assumes no prior programming experience and uses Rust as the only language.
The book is structured around forty-three concepts (the DAG) and their canonical wording (the glossary). Sections are short - two to three pages of prose followed by four to twelve compounding exercises. Concepts are named only after they are built: every section earns its vocabulary through working code, not the other way around.
The through-line is a small ecosystem simulator built in stages from one hundred wandering creatures to a hundred million streamed ones. The simulator’s specification is at code/sim/SPEC.md.
This is a work in progress. Section ordering is by the DAG; reading order can be linear (front to back) or by following the cross-links wherever they lead.
Who this book is for
You want to build something. You are either coming to programming from another field, or you tried it before and found that what got taught did not match what you wanted to make. You can read code; you may have written some; you have not been bitten enough to feel that programming is yours yet.
The book is for people who learn by building artifacts and want technical depth that compounds - where each new idea makes the previous one more useful, not just adds another tool to a pile. The through-line is a small ecosystem simulator that grows from a hundred creatures to a hundred million; everything you learn earns its keep on that one program, then transfers everywhere else.
It is not aimed at the median CRUD-application job market. If your goal is “any programming job, fastest,” there are faster paths. If your goal is “the kind of programmer whose programs work,” this is one of them.
Background
You should be comfortable with high-school algebra and a command line - running a command, changing directories, reading error messages without panic. A laptop with internet is enough for the first ten sections; for the rest, you will install a Rust toolchain locally.
You do not need prior programming experience, calculus, a maths degree, or any prior contact with Rust. The book teaches Rust syntax as each section needs it; the language is a vehicle, not the subject.
A first taste
Before any vocabulary is named, here is what an ECS world looks like in fifteen lines of Rust. One hundred creatures, each with a position and a velocity, moving for thirty ticks of simulated time. No structs, no traits, no libraries - four Vecs indexed in lockstep, and a function (the for i in 0..x.len() loop) that advances every creature one step.
fn main() {
let mut x: Vec<f32> = (0..100).map(|i| (i as f32) * 0.1).collect();
let mut y: Vec<f32> = (0..100).map(|i| (i as f32).sin()).collect();
let vx: Vec<f32> = (0..100).map(|i| ((i * 7) % 11) as f32 * 0.01 - 0.05).collect();
let vy: Vec<f32> = (0..100).map(|i| ((i * 13) % 7) as f32 * 0.01 - 0.03).collect();
for tick in 0..30 {
for i in 0..x.len() {
x[i] += vx[i];
y[i] += vy[i];
}
if tick % 10 == 0 {
println!("tick {tick}: creature 17 at ({:.2}, {:.2})", x[17], y[17]);
}
}
}Click play. The simulator runs in your browser, prints three lines, and stops. That is the entire shape of what the rest of the book grows: tables (the Vecs), a tick (the outer loop), a system (the inner loop). Everything that follows is the discipline that lets this same shape carry a hundred million creatures without falling apart.
Running the code
Most code blocks in the early chapters have a play button that runs the code in your browser via the Rust Playground. Click it, edit, see the result. No setup required. The deck-game exercises in §5, §9, and §10 are designed to be run this way - open the page, hit play, work through the exercises in the editor that appears.
From the simulator chapters onward, the exercises stop being self-contained snippets. They build the through-line: a working Rust program that grows from one hundred wandering creatures to a hundred million streamed ones. Running them needs a local Rust toolchain, a project that holds state between runs, and the ability to time loops on your own hardware. By that point you will want a clone of the book’s repo:
git clone https://codeberg.org/root-11/intro-book.git
cd intro-book
cargo run --release --bin sim
For the timing exercises in §1, the play button works but the numbers it produces are not yours - they come from a shared server the playground happens to be running on. The exercise asks “how fast does your machine run this?”, and that question only has a real answer locally. Click play for a first taste; then run on your own hardware for the numbers the rest of the book references.
The threshold between playground and local is fuzzy by intent. A reader on a phone or in a classroom can stay in the browser through §10. Beyond that, treat a local toolchain as part of the curriculum.
The companion edition
If you want to read the same book in a slow language and see what discipline must replace what the type system here enforces for you, the Python edition (codeberg,github) covers the same forty-four sections in Python and numpy. The architecture is identical; the language differs. Many readers find Python a useful contrast: every borrow-check error here is a runtime mistake there, and the per-chapter Python commentary names the cost.
Nomenclature
Quick reference for symbols, notation, and abbreviations the book uses. Concept definitions live in the glossary; this page covers the shorthand only.
Symbols
| Symbol | Meaning |
|---|---|
| §N | Section number - e.g., §5 refers to section 5. |
| → | Leads to / becomes / transitions to. Appears in section titles (e.g., §29 “10K → 1M”) and prose. |
[!NOTE] / [!TIP] / [!WARNING] | Callout box - content the reader should pay particular attention to. |
Text formatting
| Form | Meaning |
|---|---|
monospace | Code: types, variable names, function names, file paths. |
| italic | First definition of a term, or emphasis. |
| bold | A term being highlighted as load-bearing in the current paragraph. |
Variables you will see across chapters
| Variable | Meaning |
|---|---|
i, j | Index into a table. i is the index of the row currently under discussion. |
t or tick | Tick number - the simulator’s step counter. |
id | Stable entity identifier (an integer). |
gen | Generation counter, paired with a slot index to detect stale references (§10). |
pos, vel | Position and velocity of a creature. |
to_remove, to_insert | Buffers of pending mutations applied at end-of-tick (§22). |
Rust types used in code
| Type | What it is |
|---|---|
Vec<T> | Heap-allocated, growable array of T. The book’s “table.” |
&[T] | Read-only borrow of a contiguous slice. |
&mut [T] | Mutable borrow of a contiguous slice. |
usize | Pointer-sized unsigned integer. Used for table indices. |
u8 / u16 / u32 / u64 | Unsigned integers, sized in bits. |
f32 / f64 | 32-bit and 64-bit floats. |
Abbreviations
| Acronym | Expanded |
|---|---|
| ECS | Entity-Component-Systems |
| EBP | Existence-Based Processing |
| DOD | Data-Oriented Design |
| SoA | Structure of Arrays - each field is its own column. |
| AoS | Array of Structures - each row is its own struct. |
| DAG | Directed Acyclic Graph |
| IOPS | I/O Operations Per Second |
| TDD | Test-Driven Development |
| LRU | Least Recently Used (cache eviction policy) |
EBP is this book’s shorthand. The spelled-out term - existence-based processing - is Richard Fabian’s, from Data-Oriented Design; §17 introduces it from the simulator. An acronym index will not list “EBP” because the source literature spells the term out rather than abbreviating it.
Naming in code
snake_casefor variables, functions, fields.PascalCasefor types and traits.SCREAMING_SNAKEfor constants.- File names mirror their dominant content:
creatures.rsdefines the creature table,motion.rsthe motion system.
1 - The machine model
Concept node: see the DAG and glossary entry 1.
Most explanations of “how a computer works” use a diagram with a CPU and a single big block called memory. The diagram is wrong. Memory is many things at different speeds, and which one your data sits in decides whether your program is fast or slow.
Inside the CPU there is L1 cache - small, sometimes only 32 KB per core, but a read from it costs about one nanosecond. Around it sits L2 - a few hundred KB, around 3-4 ns. Then L3 - measured in megabytes, around 10 ns. Outside the CPU sits main memory (RAM) - gigabytes, around 100 ns per read. The numbers vary by chip, but the ratios are stable: L1 is roughly a hundred times faster than RAM. Cache and RAM are the same kind of thing - bytes that the CPU reads - but they sit at very different distances from the arithmetic units.
When your code reads vec[17], the CPU does not pull just byte 17. It pulls a whole 64-byte chunk - a cache line - and keeps that line in L1. The next read of vec[18] is then almost free. Reading sequentially through a Vec is fast because every line that gets loaded is mostly used before it gets evicted. Reading at random is slow because every read costs a fresh trip to RAM.
A pointer is an address in memory. Following one - *ptr - is one memory read at an address the CPU does not get to predict. If the address is in cache, the read is fast; if not, you wait the full ~100 ns. A program with many objects and many pointers between them is a program with many of those waits.
That asymmetry is the dominant fact about modern CPUs. The arithmetic - adding, multiplying, branching - is virtually free; the cost is getting the data to the arithmetic. A program that respects this is fast. A program that ignores it can be a hundred times slower2 than a program that does the same work, with the same number of additions, but in a layout the cache likes.
This is also what makes “complexity class” misleading on its own. An O(N log N) algorithm that hits the cache hard can outrun a “faster” O(N) algorithm that scatters reads across RAM. Big-O describes how cost grows with N; layout describes the constant factor that gets multiplied in. At the scales this book targets, the constant factor often wins.
You will measure this in the next two sections. The numbers above are nominal - the chip in front of you may be slightly faster or slightly slower, and the ratios are what matters. Once you have felt how big the gap is, the rest of the book’s reasoning about layout, SoA, locality, and parallelism follows naturally.
Measurements
Reference values for these calibrations - yours will differ by machine, and the spread is the point. Full per-machine output: code/README.md.
| # | measurement | Ryzen 9 (modern) | i7-3610QM (2012) | i3-5010U (2015) | Pi 4 |
|---|---|---|---|---|---|
| 1 | Vec sum, ns/element at N = 100M | 0.14 | 0.44 | 0.70 | 2.03 |
| 2 | pointer-chase vs Vec sum, 1M (random ÷ sequential) | 270x | 120x | 103x | 63x |
| 3 | cache cliffs visible in the ns/element staircase | 1 (L3→RAM) | 3 | 2-3 | 3 |
Exercises
These exercises are calibrations. Run them on your machine and write the numbers down - the rest of the book references them.
- Look up your cache sizes. On Linux,
lscpu | grep -i cachelists L1d, L1i, L2, L3 per core. Write them down. (On macOS:sysctl -a | grep cache.) These are the budgets node 25 will hold you to later. - Time a sequential sum. Build a
Vec<u64>of 100,000,000 elements (usevec![1u64; 100_000_000]), then timevec.iter().sum::<u64>(). Usestd::time::Instant. Note the time per element in nanoseconds. - Time a random-access sum. Build the same
Vec<u64>, plus aVec<usize>of 100,000,000 random indices. Time the looplet mut s = 0u64; for &i in &indices { s += vec[i]; }. Compare with exercise 2. - Find the cache cliffs. Repeat exercise 2 at sizes 1K, 10K, 100K, 1M, 10M, 100M. Plot
time/element(or just print it). Note the size at which it jumps - that’s where you spilled out of L1, then L2, then L3.
|
|
Note - What you see depends on your CPU. On older or smaller chips (Raspberry Pi 4 Cortex-A72, 2012 i7-3610QM, 2015 i3-5010U), the L1, L2, and L3 transitions appear as a graded staircase in ns/element. On modern desktop chips, a stronger prefetcher and wider SIMD often merge L1/L2/L3 into a single visible cliff at the L3→RAM boundary. Both are correct - both teach the same point. If you see one cliff on your machine, repeat the exercise with random indices (the §1.3 pattern) to surface the others. |
- Pointer chasing. Build a linked list of 1,000,000
Box<Node>whereNode { value: u64, next: Option<Box<Node>> }. Time a sum that walks the list. Compare with the same sum on aVec<u64>of the same length. The ratio is roughly the L1-to-RAM ratio.
|
|
Note - The ratio depends on your CPU. Measured: ~60× on a Raspberry Pi 4, ~90-115× on mid-2010s Intel laptops, ~270× on a Ryzen 9 270. The wider gap on newer hardware reflects faster cores running ahead of an unchanged DRAM latency. The order of magnitude (60-270×) is robust; the exact factor is not. Note also: a list built by |
- (stretch) Read your
lscpuoutput to your benchmarks. With your cache sizes from exercise 1 and your timings from exercise 4, identify which level of cache each size step is leaving. The transitions are not always clean - annotate where they are noisy.
Reference notes for these exercises in 01_the_machine_model_solutions.md.
What’s next
The numbers you wrote down in exercise 1 and the cliffs you found in exercise 4 are the constants behind the whole book. §2 - Numbers and how they fit takes the next step: how big is each unit of data, and how many fit in a cache line?
Solutions: 1 - The machine model
These exercises are about measuring your machine. Numbers vary; ratios are stable. Run them and write down what you see.
Exercise 1 - Cache sizes
Linux: lscpu | grep -E 'L1|L2|L3' or getconf -a | grep CACHE.
Typical desktop x86-64 in 2026: L1d 32-48 KB per core, L2 1-2 MB per core, L3 16-128 MB shared. Apple Silicon: larger L1, very large shared L2.
Exercise 2 - Sequential sum
use std::time::Instant;
fn main() {
// Playground-scaled. Use 100_000_000 locally for the real number.
let n = 10_000_000;
let v: Vec<u64> = vec![1; n];
let start = Instant::now();
let sum: u64 = v.iter().sum();
let elapsed = start.elapsed();
let ns_per_elem = elapsed.as_nanos() as f64 / v.len() as f64;
println!("sum = {sum}, {elapsed:?}, {ns_per_elem:.2} ns/elem");
}Expect somewhere around 0.2-1 ns per element on modern hardware. The loop is memory-bandwidth bound; the CPU is mostly waiting for RAM to deliver lines.
Exercise 3 - Random-access sum
use std::time::Instant;
fn main() {
// Playground-scaled. Use 100_000_000 locally for the real number.
let n: usize = 10_000_000;
let v: Vec<u64> = vec![1; n];
let mut state = 0xDEAD_BEEFu64;
let indices: Vec<usize> = (0..n)
.map(|_| {
state = state.wrapping_mul(6364136223846793005).wrapping_add(1442695040888963407);
(state as usize) % n
})
.collect();
let start = Instant::now();
let mut sum = 0u64;
for &i in &indices {
sum += v[i];
}
let elapsed = start.elapsed();
println!("sum = {sum}, {elapsed:?}, {:.2} ns/elem",
elapsed.as_nanos() as f64 / n as f64);
}Expect 30-100 ns per element - close to the RAM-latency cost. Each access misses cache.
Exercise 4 - Cache cliffs
The transitions you see roughly correspond to spilling out of L1 (~32 KB), L2 (~1-2 MB), L3 (~32 MB). Below L1 you should see ~0.1-0.3 ns/elem. In L3 maybe 0.5-1.5 ns. Past L3, 0.5-3 ns (sequential, since prefetcher helps even from RAM).
For random-access cliffs (a more dramatic plot), repeat exercise 3 at sizes 1K, 10K, 100K, 1M, 10M, 100M. The transitions are sharper.
Exercise 5 - Pointer chasing
The trap in this exercise is that the obvious way to build the list does not measure what you think it measures. A list built by threading boxes as you allocate them -
#![allow(unused)]
fn main() {
// anti-pattern: bad! nodes land at sequential heap addresses
let mut head = Box::new(Node { value: 0, next: None });
for i in 1..n { head = Box::new(Node { value: i, next: Some(head) }); }
}- hands every
Boxback-to-back from the allocator. The “linked list” is aVecin disguise: traversal walks straight up consecutive cache lines and the prefetcher hides every read. You will measure ~2 ns/elem and conclude pointers are free. They are not; you measured a contiguous scan.
To surface the real cost, build in two steps: allocate all the nodes first, then shuffle the order in which you thread them. Each box keeps its original address; the chain visits them scrambled, so each next is a jump to an unpredictable line.
use std::time::Instant;
struct Node { value: u64, next: Option<Box<Node>> }
fn build_shuffled(n: usize) -> Box<Node> {
let mut nodes: Vec<Box<Node>> = (0..n as u64)
.map(|i| Box::new(Node { value: i, next: None }))
.collect();
// Fisher-Yates with an inline LCG (no deps, Playground-friendly).
let mut s = 0x1234_5678_u64;
let mut rng = || { s = s.wrapping_mul(6364136223846793005).wrapping_add(1); s };
for i in (1..nodes.len()).rev() {
let j = (rng() % (i as u64 + 1)) as usize;
nodes.swap(i, j);
}
let mut head: Option<Box<Node>> = None;
while let Some(mut node) = nodes.pop() { node.next = head; head = Some(node); }
head.unwrap()
}
fn sum(mut head: &Node) -> u64 {
let mut s = 0;
loop {
s += head.value;
match &head.next {
Some(next) => head = next,
None => break s,
}
}
}
// Recursive Drop walks `next` on the stack and overflows at large N.
// Tear the chain down iteratively.
fn drop_list(head: Box<Node>) {
let mut cur = Some(head);
while let Some(mut node) = cur { cur = node.next.take(); }
}
fn main() {
// Playground-scaled. Use 1_000_000 locally for the real number.
let n = 100_000;
let head = build_shuffled(n);
let start = Instant::now();
let s = std::hint::black_box(sum(&head));
let elapsed = start.elapsed();
println!("sum = {s}, {elapsed:?}, {:.2} ns/elem",
elapsed.as_nanos() as f64 / n as f64);
drop_list(head);
}A Vec<u64> sum runs 0.1-2 ns/elem depending on the chip; the shuffled linked-list walk is the same scan paying full DRAM latency on every next. The measured ratio is ~60× on a Pi 4, ~90-115× on mid-2010s Intel, ~270× on a Ryzen 9 270 (see code/measurement/src/bin/pointer_chase.rs and the cross-machine table in code/README.md). Without the shuffle the ratio collapses toward 1× - that is the prefetcher, not the absence of a tax.
Three stack-overflow traps hide in this exercise, all from recursion over next:
- Building by deep recursion overflows on the way down - the loop above scales.
- A recursive
sumoverflows likewise - walk it iteratively. - The implicit
Dropis recursive too, and fires whenheadleaves scope. At N=1M it overflows even though your code never named a recursive function.drop_listtears the chain down by hand.
Exercise 6 - Reading lscpu against your benchmarks
The transitions are noisy because:
- Cache levels overlap (a hot cache line might still be in L1 after spilling to L2).
- Hardware prefetchers help sequential reads.
- The OS may evict pages between runs.
If your noise is worse than your signal, run each measurement multiple times and take the median.
2 - Numbers and how they fit
Concept node: see the DAG and glossary entry 2.
A cache line is 64 bytes on x86 and most ARM chips - the unit of memory the CPU loads at a time. (A few designs differ: some Apple Silicon cache levels use 128; §33 has the details.) This book assumes 64 throughout. Everything you do with data is, in part, a question of how many things fit in one cache line.
Rust gives you several integer widths: u8 (one byte, 0 to 255), u16 (two bytes, 0 to 65 535), u32 (four bytes, around four billion), u64 (eight bytes, around 1.8×10¹⁹). The signed versions - i8, i16, i32, i64 - use one bit for the sign and the rest for magnitude. For floating-point: f32 (four bytes, ~7 decimal digits of precision), f64 (eight bytes, ~15 decimal digits).
A Vec<u8> of length N is N bytes. A Vec<u64> is 8N bytes. So a Vec<u8> fits 64 elements per cache line; a Vec<u64> fits 8. Walk the whole vector and the u64 version pulls in 8× as many cache lines as the u8 version: the same element count, eight times the bytes1.
This is the width budget. Picking a wider type than you need is not free; it costs cache lines, and at the scales this book targets, cache lines are the budget you spend.
The rule is simple: pick the narrowest type that holds your range, and write down why. A 52-card deck’s suits need 4 values, ranks need 13, locations need maybe 8 - all fit in u8. A creature’s pos needs about ten kilometres of grid resolved to centimetre precision; that fits in f32. A timestamp in microseconds for a year-long simulation needs something like 3×10¹³, which does not fit in u32 (4×10⁹) but fits comfortably in u64. Choose, and write the choice down.
Floats are the trickier case. They look like real numbers but are not. There are only about 4 billion f32 values; there are only about 18 quintillion f64 values; that is finite. Operations have edges: 1.0 / 0.0 = inf, 0.0 / 0.0 = NaN, and NaN != NaN - yes, equality is broken on purpose, because there is no reasonable answer. Subtracting two nearly equal floats loses most of their precision (this is catastrophic cancellation). Adding a tiny float to a large one quietly drops the tiny one (this is absorption). None of this is a problem if you know it is there; all of it is a problem if you assume floats are mathematics.
Most of this book uses u8, u16, u32, f32, and u64 for time. i* and f64 appear when the range or precision genuinely demands it. The choice is documented at every column declaration.
Measurements
Eight times the bytes is less than eight times the time - the sum is bandwidth-bound, not purely line-count-bound, and a wider type also feeds the prefetcher more to chew on. Full output: code/README.md.
| # | measurement | Ryzen 9 (modern) | i7-3610QM (2012) | i3-5010U (2015) | Pi 4 |
|---|---|---|---|---|---|
| 1 | u8 vs u64 sum, N = 100M | 1.8x | 2.0x | 2.5x | 4.6x |
Exercises
- Sizes. Print
std::mem::size_of::<u8>(),<u16>,<u32>,<u64>,<i32>,<f32>,<f64>,<usize>. Confirmusizeis 8 on a 64-bit machine. - Cache-line packing. For each type above, compute how many fit in a 64-byte cache line. A
Vec<u32>of 16 elements is exactly one line; aVec<u64>of 8 elements is exactly one line. - Width and speed. Sum a
Vec<u8>of 100,000,000 ones, then aVec<u64>of the same length. Compare times. Some of the difference is memory bandwidth (8× more bytes); some is cache pressure. - Float weirdness. Compute
0.0_f64 / 0.0_f64,1.0_f64 / 0.0_f64, and(0.0_f64).sqrt(). Print them. Then checklet nan = 0.0_f64 / 0.0_f64; assert!(nan != nan);- confirm it does not panic. - Catastrophic cancellation. Compute
1e10_f32 - (1e10_f32 - 1.0_f32). The result should be1.0; onf32it usually is not. Repeat withf64and observe it gets closer. - Choose a width. For each of these columns, write down the type you would pick and why: a creature’s age in ticks at 30 Hz over a year-long simulation; a card’s suit; the pixel count of a 4K screen; the user id in a system with up to 100 million users; an audio sample value in 16-bit PCM.
- (stretch) The actual range of
f32. Read thef32documentation. What isf32::MAX?f32::EPSILON? What does the latter mean for a sum of small numbers?
Reference notes in 02_numbers_and_how_they_fit_solutions.md.
What’s next
§3 - The Vec is a table takes the next step: now that you know how big the elements are, what does a Vec<T> do with them?
Solutions: 2 - Numbers and how they fit
Exercise 1 - Sizes
use std::mem::size_of;
fn main() {
println!("u8: {}", size_of::<u8>()); // 1
println!("u16: {}", size_of::<u16>()); // 2
println!("u32: {}", size_of::<u32>()); // 4
println!("u64: {}", size_of::<u64>()); // 8
println!("i32: {}", size_of::<i32>()); // 4
println!("f32: {}", size_of::<f32>()); // 4
println!("f64: {}", size_of::<f64>()); // 8
println!("usize: {}", size_of::<usize>()); // 8 on 64-bit
}Exercise 2 - Cache-line packing
| type | bytes | per 64-byte line |
|---|---|---|
u8 | 1 | 64 |
u16 | 2 | 32 |
u32 | 4 | 16 |
u64 | 8 | 8 |
f32 | 4 | 16 |
f64 | 8 | 8 |
Exercise 3 - Width and speed
A Vec<u8> sum reads roughly 1/8 the bytes that a Vec<u64> sum does. Modern CPUs are usually memory-bandwidth bound on simple sums, so expect about 4-8× speed difference (not always 8×, because the small-element loop may not auto-vectorise as well, or because the wider type fits more arithmetic per instruction).
Exercise 4 - Float weirdness
0.0 / 0.0 = NaN
1.0 / 0.0 = inf
(-1.0).sqrt() = NaN
let nan = 0.0_f64 / 0.0_f64;
nan != nan // true!
NaN != NaN is by IEEE 754 definition: there is no sensible value to compare with, so equality is false. assert!(nan == nan) would panic; we want assert!(nan != nan).
Exercise 5 - Catastrophic cancellation
#![allow(unused)]
fn main() {
let a: f32 = 1e10;
let b: f32 = 1e10 - 1.0; // f32 may not even represent this distinctly
println!("{}", a - b); // expected 1.0; you may get 0.0 or 2.0 or 1024.0
let a: f64 = 1e10;
let b: f64 = 1e10 - 1.0;
println!("{}", a - b); // closer to 1.0
}f32 has ~7 decimal digits; 1e10 already exhausts those. f64 has ~15.
Exercise 6 - Choose a width
| column | type | reasoning |
|---|---|---|
| age in ticks at 30 Hz × 1 yr | u32 | 30 × 60 × 60 × 24 × 365 ≈ 9.5×10⁸; fits in u32 |
| card suit | u8 | 4 values |
| 4K pixel count | u32 | 8.3 million pixels |
| user id, 100M users | u32 | 4×10⁹ headroom |
| 16-bit PCM sample | i16 | the format defines it |
Exercise 7 - f32 ranges
f32::MAX ≈ 3.4×10³⁸. f32::EPSILON ≈ 1.2×10⁻⁷. EPSILON is the smallest x for which 1.0 + x ≠ 1.0. Adding many EPSILON-scale numbers to a large value can therefore not increase it - they get absorbed. Summing 10⁹ small floats is often less accurate than summing them in pairs (a Kahan sum fixes this).
3 - The Vec is a table
Concept node: see the DAG and glossary entry 3.
A Vec<T> is three things stored on the stack: a pointer to a contiguous run of T values on the heap, the current length, and the current capacity. The values themselves live on the heap, side by side, with no padding between them. vec[i] computes ptr + i * size_of::<T>() and reads.
This is the only container the trunk of this book uses. There are no hash maps, no linked lists, no trees - not because they do not exist, but because almost every problem the book teaches is a problem of “process all the rows of a table”, and a Vec<T> is the table. Adding any other container costs cache, costs allocations, and breaks the sequential-access pattern that nodes 1 and 2 just told you to want.
vec.push(x) adds an element. If there is capacity, it writes into the next slot - O(1). If not, it allocates a larger heap region (typically twice the current capacity), copies everything across, and frees the old one. Amortised over many pushes that is O(1), but each individual push might be expensive. If you know how many elements you are going to insert, Vec::with_capacity(n) allocates once and avoids the copies.
vec.swap_remove(i) removes the element at i in O(1) by moving the last element into the freed slot. Order is sacrificed for speed. This will earn its keep at §21.
vec.iter() walks the slots in order. The compiler can usually turn this into a tight memory-bandwidth-bound loop with auto-vectorisation. vec.iter_mut() does the same, with mutation.
A &[T] is a slice - a pointer plus a length, without the capacity. It is what functions usually take when they want to read a Vec without owning it. &mut [T] is the same with mutation. Most systems in this book have signatures like fn motion(px: &mut [f32], py: &mut [f32], vx: &[f32], vy: &[f32]) - read these, write those, no ownership taken.
That is the full vocabulary you need from Vec for the next several phases. Everything else (HashMap, BTreeMap, Box<Node>, Rc<RefCell<T>>, LinkedList) is something you will reach for only when an exercise demands it and the from-scratch test (node 40) shows it earns its weight.
Measurements
Order of magnitude (60-200×) is the durable claim; the exact factor widens with the machine because the Vec sum vectorises and prefetches and HashMap::get cannot. Full output: code/README.md.
| # | measurement | Ryzen 9 (modern) | i7-3610QM (2012) | i3-5010U (2015) | Pi 4 |
|---|---|---|---|---|---|
| 1 | Vec index vs HashMap get, 1M | 160x | 89x | 77x | 65x |
Exercises
- Layout. Print
std::mem::size_of::<Vec<u32>>(). It should be 24 on a 64-bit machine - three pointer-sized fields. Notice that the size of the Vec value does not depend on how many elements it holds. - Capacity vs length. Build
let mut v: Vec<u32> = Vec::new();. In a loop from 0 to 100, printv.len()andv.capacity()after eachv.push(i). Observe the capacity doubling pattern: 0, 4, 8, 16, 32, 64, 128. - Pre-size. Build
let mut v = Vec::with_capacity(100);and push 100 elements. Printlenandcapacityonce at the end. There were no reallocations. - Indexing cost. Sum a 1M
Vec<u32>by index:black_box((0..N).map(|i| v[i] as u64).sum::<u64>()). Time it. Now build aHashMap<usize, u32>with the same entries (keyimaps to the value) and sum it by the same indices:(0..N).map(|i| map[&i] as u64).sum::<u64>(). Eachmap[&i]is one hash-and-probe, so this measures indexed lookup. Draining the map withinto_values().sum()walks it in bucket order instead, a cheap sequential pass that measures the wrong thing. IndexedVecreads should be ~10-100× faster1.
|
|
Note - Measured ratios: ~65× on a Raspberry Pi 4, ~90-95× on mid-2010s Intel laptops, ~160× on a Ryzen 9 270. All use Rust’s default |
swap_removevsremove. Build aVec<u32>of 1,000,000 elements. Time removing 100 elements from the middle withvec.remove(500_000)(in a loop, because eachremoveshifts roughly half the vector). Time the same withvec.swap_remove(500_000). Note the orders-of-magnitude difference.- Slices in function signatures. Write
fn sum(xs: &[u32]) -> u64. Call it withsum(&v)wherev: Vec<u32>. Note that you did not have to write&v[..]- the conversion is automatic. - (stretch) A from-scratch
MyVec<u32>. ImplementMyVecwith a raw pointer, length, and capacity. Implementnew,push,get, andDrop. (You will useunsafe. Read the Rustonomicon’sVecchapter when stuck.) Convince yourself aVec<T>is a few hundred lines of careful work, no magic.
Reference notes in 03_the_vec_is_a_table_solutions.md.
What’s next
§4 - Cost is layout, and you have a budget is where the layout reasoning from §1 and §2 meets the per-tick clock the rest of the book runs on. After that, §5 - Identity is an integer is the card game.
Solutions: 3 - The Vec is a table
Exercise 1 - Layout
use std::mem::size_of;
fn main() {
println!("Vec<u32> = {}", size_of::<Vec<u32>>()); // 24
println!("Vec<u64> = {}", size_of::<Vec<u64>>()); // 24
println!("Vec<u8> = {}", size_of::<Vec<u8>>()); // 24
}A Vec<T> is always 24 bytes on a 64-bit machine (three 8-byte fields: ptr, len, cap), regardless of T. The element data lives elsewhere on the heap.
Exercise 2 - Capacity growth
#![allow(unused)]
fn main() {
let mut v: Vec<u32> = Vec::new();
for i in 0..100 {
v.push(i);
if v.len().is_power_of_two() || v.len() < 5 {
println!("len={}, cap={}", v.len(), v.capacity());
}
}
}Output (Rust’s current strategy roughly doubles, but starts at 4):
len=1, cap=4
len=2, cap=4
len=4, cap=4
len=8, cap=8
len=16, cap=16
len=32, cap=32
len=64, cap=64
Each transition is a reallocation: a new heap region is allocated, all elements are memcpy’d across, the old one is freed.
Exercise 3 - Pre-size
#![allow(unused)]
fn main() {
let mut v = Vec::with_capacity(100);
for i in 0..100 { v.push(i); }
println!("len={}, cap={}", v.len(), v.capacity()); // len=100, cap=100
}No reallocations happened. This is the right pattern when you know the upper bound - and most simulations do.
Exercise 4 - Indexing cost
Indexing a Vec<u32> runs ~1 ns/elem. A HashMap<usize, u32> lookup costs ~50-100 ns each (hash, probe, compare). Multiple orders of magnitude.
Iterate the map by index - map[&i] for each i - not into_values(). The cost being measured is the per-key hash-and-probe that an indexed lookup pays; draining the map in bucket order is a cheap sequential walk that hides exactly that cost, so it reports the wrong ratio.
Exercise 5 - swap_remove vs remove
100 calls to vec.remove(500_000) on a 1M Vec<u32> move ~50 million elements (each remove shifts ~half the vector). At ~1 ns per move that is ~50 ms total.
100 calls to vec.swap_remove(500_000) on the same vector move 100 elements total - under a microsecond.
The factor is roughly N / 2. For 1 million entries, that is half a million times faster.
Exercise 6 - Slices in function signatures
#![allow(unused)]
fn main() {
fn sum(xs: &[u32]) -> u64 {
xs.iter().map(|&x| x as u64).sum()
}
let v: Vec<u32> = (0..1000).collect();
let total = sum(&v); // &Vec<u32> auto-derefs to &[u32]
}The function takes a slice; the caller passes &v. The conversion (Deref) is automatic. This is why almost every system in the book has signatures over &[T] and &mut [T], not &Vec<T>.
Exercise 7 - A from-scratch MyVec<u32>
The full implementation is in the Rustonomicon; about 200 lines including tests. The key shape:
#![allow(unused)]
fn main() {
struct MyVec<T> {
ptr: NonNull<T>,
len: usize,
cap: usize,
}
}new starts with cap = 0 and a dangling pointer. push allocates on first push (grow), then doubles capacity when full. get returns Option<&T> with bounds check. Drop frees both elements (running their destructors) and the heap allocation.
Working through this once is the cheapest way to convince yourself a Vec<T> is a small piece of careful work - and to internalise §42 - You can only fix what you wrote.
4 - Cost is layout - and you have a budget
Concept node: see the DAG and glossary entry 4.
A system is not handed a target rate; it chooses one. Work arrives as a stream - frames to draw, packets to route, sensor samples to fold in - and the only real decision is how finely to cut that stream into batches. Each batch is one tick, and the rate is the grain of the cut. Cut at one operation per tick and nothing batches: every operation carries its fixed overhead alone, and at a 1 GHz tick the budget is a few nanoseconds, too little to work in. Cut at one tick for all pending work and efficiency is maximal but nothing is answered until everything is: a tick a minute has no perceptible responsiveness. Every useful rate sits between those ends, balancing responsiveness against the efficiency of batching.
Two different things bound that band. Whether you can keep up at all is fixed by the per-item cost against the arrival rate: if work lands at rate λ and each item costs c, you survive only when λ · c ≤ 1, and c is a layout fact (§3), not a scheduling one. The rate itself is the second, separate choice: a faster tick means smaller batches and lower latency with less to amortise each fixed cost over; a slower tick means larger batches, better amortisation, and more latency. Batching only ever pays because there are fixed costs to spread - a dispatch, a cache warmup, a syscall, a kernel launch - which is the same amortisation §8 names over data, here run along time.
The responsiveness floor is set by whoever consumes the output. Roughly 24 to 30 frames a second is where discrete frames read as continuous motion for passive viewing, which is why film sits there; interactive rendering wants 60, and head-mounted VR wants 90 to 120 to stay comfortable. A control loop runs as fast as its plant needs a correction, often 1 kHz; an audio loop is pinned to its 48 kHz sample rate; an interactive shell answers as fast as a human can type. Different consumers, different floors, one calculus. The rate you choose is the coarsest batch its floor will tolerate, and it sets a budget - the time available for one tick of work. What you then spend against that budget is governed by layout, which is where the rest of this chapter goes.
| Target rate | Budget per tick |
|---|---|
| 30 Hz | 33 ms |
| 60 Hz | 17 ms |
| 1000 Hz | 1 ms |
| 1 000 000 | 1 µs |
Every operation the program does in one tick spends from that budget. Operations have very different costs: the arithmetic is virtually free, an L1 read is around 1 ns, an L3 read is around 10 ns, a RAM read is around 100 ns, a disk read is around 100 µs, a network round-trip is around 100 ms. A 30 Hz program spending one disk read per tick has lost a third of its budget on one operation.
|
|
Note - Three regimes are worth naming, because the rest of the book references them. A loop is compute-bound when its cost is dominated by arithmetic - typically when the data fits in L1 and the inner instructions are heavy (dot products, transcendentals, integer divides). It is bandwidth-bound when its cost is dominated by how fast the memory subsystem can deliver bytes - typically when the working set is bigger than L3 but the access pattern is sequential, so the prefetcher can fill lines ahead of demand. It is latency-bound when its cost is dominated by individual memory round-trips - typically when the access pattern is random, so the prefetcher cannot help. The three regimes have very different time budgets and very different power profiles. A sequential |
The unit of accounting is time - microseconds for most real-time work, nanoseconds for tight inner loops. A 30 Hz tick has 33 ms (33 000 µs) of budget; a 1 kHz tick has 1 000 µs; a 1 MHz tick has 1 µs. When a teacher asks you “what does this function cost?”, they are asking how many microseconds it takes. A function that costs 100 µs out of a 33 000 µs budget is fine - about 0.3% of the tick. The same function in a 1 000 µs budget is 10% of the tick. The same function in a 1 µs budget does not exist; there is no room for it.
Cost is also layout. The same algorithm that costs 100 µs on a sequential Vec may cost 5 ms on a hash map of the same size, because the loads scatter. Two programs with the same big-O complexity can differ by an order of magnitude on the same hardware, just because of where their data sits.
This gives you a design rule. Decide your target rate before you decide anything else. That sets the budget. Then when you choose data structures, ask whether the resulting working set fits in cache; ask how many memory loads per row your inner loop does; ask whether any single operation in the loop dominates the budget. Most decisions become forced once the budget is named.
The reverse direction is also useful. If you find yourself wanting to add something to the inner loop - a database query, a HashMap lookup, an allocation - count its cost in microseconds against the budget. Often the answer is “this single addition uses 80% of my tick”, and the right move is not to optimise it but to lift it out of the inner loop entirely.
The shape of this thinking is familiar to engineers in other domains. An electrical engineer designs a circuit by counting milliamps against a current budget. A structural engineer counts kilonewtons against a load budget. The data-oriented programmer counts memory loads and microseconds against a tick budget. Good design is measured in millivolts and microamps - and in nanoseconds and microseconds.
|
|
Note - Time is one budget. Power is another. Cache hits are energetically nearly free - the data is already next to the arithmetic units. Cache misses fire up the memory controller, the bus drivers, sometimes a DRAM refresh; that is where the watts go. A loop that fits in L2 spends most of its time on cheap arithmetic; a loop that pointer-chases through RAM spends most of its time waiting, and during the waiting the CPU drops clocks and the chip stays cool. The same SoA-and-sequential-access discipline that fits the time budget also fits a power budget. For embedded, mobile, control, and battery-powered work, power is the primary budget; time is downstream of it. The “millivolts and microamps” line above is literal, not metaphor. |
The budget is a curve, not a cliff
So far the budget has been a single number: name the rate, get the time per tick. But the work in a tick is rarely fixed. It grows with the problem - more entities to step, more packets to route, more rows to fold - and if the per-item cost holds, the tick time grows with it. So the rate you can actually sustain is not a constant either; it falls as the work rises, roughly as one over the size for a loop that costs O(N). Thirty hertz is not a wall you meet at some population and shatter against. It is one point on a slope that reads thirty, twenty-five, twenty, fifteen as the work climbs.
That moves the engineering question. It is seldom “does it hit thirty hertz” and almost always “where does the curve fall, and is that fall tolerable”. A control loop specified at thirty may be well served by twenty under a heavier load; a visualisation at fifteen is still watchable. So the useful design conversation names two numbers, not one: the target rate, and the tolerance - the slowest rate the consumer will accept - then reads off the scale at which the curve crosses the tolerance. You characterise the budget around the target instead of slamming into it, and “how many can we handle” becomes a number you read off a measured curve rather than a guess you defend in a meeting.
Part II puts real numbers on this slope, measured on the simulator across two orders of magnitude of scale, where a tick that holds comfortably above the target at one size slides to a fraction of the rate at a hundred times the work - all along the same one-over-N curve.
Exercises
-
Pick your rates. For each of these systems, name a plausible target rate and the resulting per-tick budget: a card game; a real-time strategy game; a market data feed; an embedded sensor controller; a web API endpoint a user is waiting for; an offline batch job that processes a billion rows.
-
Count an operation. Time a single
HashMap::geton a map of 1 000 000 entries. Note its cost in microseconds. How many can you fit in a 30 Hz tick (33 ms)? In a 1 kHz tick (1 ms)? -
The layout difference. Sum 1 000 000
u64s in aVec<u64>. Sum 1 000 000u64s in aHashMap<u32, u64>. Both are O(N). What is the per-element time difference (in nanoseconds)? Where did it go? -
The cliff. With your numbers from §1 exercise 4, pick a
Vecsize that just fits in L2 and one that just doesn’t. Time a sum loop at each size. The cliff is real. -
Working backwards from the budget. You target 60 Hz; your inner loop runs over 100 000 entities; each entity touches one cache line. Estimate the cost of the loop in microseconds and compare to your 60 Hz budget (16 666 µs). Where is your headroom?
-
A bad design. Construct a design that is “obviously fast” by big-O reasoning but blows the 30 Hz budget on a million entities. (Hint: object-graph traversal with one heap allocation per node is a classic.)
-
Find your CPU’s TDP. Look up your CPU’s rated thermal design power on the manufacturer’s spec sheet, or read it locally on Linux with
sudo dmidecode -t processor | grep -i 'power\|TDP'. Note the value. TDP is what the chip can dissipate sustained without thermal throttling - burst can be 1.5-2× higher for tens of seconds; sustained settles back to TDP. -
Battery budget. A typical laptop battery holds about 50 Wh. Your simulator runs at 30 Hz and draws an average of 8 W (mostly memory bandwidth on the inner loop). How many hours of simulation does a full charge buy? If a layout change pushes more loads to RAM and raises the average draw to 14 W, how many hours then? Express the cost of the layout change as a percentage of battery life.
-
Measure delta power. A ready-made workload generator lives at
code/measurement/. In one terminal:cargo run --release --bin power_loop -- sequential(then in a second run:... -- random). In another terminal, while the loop is running:sudo perf stat -a -e power/energy-pkg/ -- sleep 30reads the package-energy counter over 30 seconds. Run the perf command three times - idle, sequential, random - and write the joules down. Convert each to average watts. The random-access run should draw more watts than the sequential one, which should draw more than idle.While you are there: from
power_loop’s iteration count, compute your sequential read bandwidth -iterations × 10⁷ × 8 / 45gives bytes per second - and compare to the published peak of your DDR generation. If you get within a factor of two of peak, your inner loop is bandwidth-bound (the regime named in the prose). Therandommode’s iteration count, divided into wall time, gives your effective per-element latency in nanoseconds; that is the latency-bound regime. -
(stretch) Joules per access. Approximate energies per memory read: L1 hit ≈ 0.1 nJ, L2 ≈ 1 nJ, RAM ≈ 30 nJ (rough; published numbers vary by chip and process). Estimate the total energy of summing 10⁷
u64s sequentially (mostly prefetched, near-L1 cost) versus by random indices (mostly RAM misses). Convert both to milliwatt-hours and express as a fraction of a 50 Wh battery. The absolute numbers are tiny; the ratio is what your battery life and your data-centre electricity bill care about. -
The budget is a curve. Take the loop from exercise 5 (100 000 entities, one cache line each, 60 Hz). Hold the per-entity cost fixed and sweep the entity count: 100 000, 300 000, 1 000 000, 3 000 000. Compute the tick time and the sustained rate at each. At what size does the sustainable rate cross 30 Hz? 15 Hz? Plot rate against size and confirm the one-over-N shape, then name the largest scale that still meets a 15 Hz tolerance. (This is the curve Part II measures on the simulator; here you derive it from the per-item cost.)
Reference notes in 04_cost_and_budget_solutions.md.
What’s next
You now have the machine model (§1), the data widths (§2), the table primitive (§3), and the budget calculus (§4). The next section is the conceptual heart of the book: §5 - Identity is an integer. The card game is waiting.
Solutions: 4 - Cost is layout, and you have a budget
Exercise 1 - Picking rates
| system | plausible rate | budget |
|---|---|---|
| card game | turn-based; budget per move maybe 100 ms (responsive feel) | - |
| real-time strategy game | 30-60 Hz | 17-33 ms |
| market data feed | 1 kHz to 100 kHz | 10 µs to 1 ms |
| embedded sensor controller | 1-10 kHz | 100 µs to 1 ms |
| web API endpoint user is waiting for | rate is per-request; budget ~50-200 ms is “fast” | - |
| offline batch over 1B rows | not real-time; budget set by total time, e.g. “complete in under 1 hour” |
The lesson is: every system has a rate, even ones not described as “real-time”. Naming it makes the budget visible.
Exercise 2 - Count an operation
HashMap::get on 1M entries: typically 50-150 ns. Pick the middle: 100 ns = 0.1 µs. In a 30 Hz tick (33 333 µs) you can fit 33 333 / 0.1 ≈ 330 000 lookups. In a 1 kHz tick (1 000 µs) you can fit 10 000.
If your “for each entity, look up something” loop has 1 000 000 entities, neither tick budget fits - you must restructure (a sorted index, a join, a column lookup) or accept a slower rate.
Exercise 3 - The layout difference
Vec<u64> sum: ~0.2-2 ns/elem.
HashMap<u32, u64> sum: ~40-160 ns/elem.
Roughly 65-165× difference for the same total work, measured across the four reference machines (vec_vs_hashmap; per-machine numbers in code/README.md). Most of it goes to memory: hash maps have one cache line per bucket, the buckets aren’t sequential, the hash itself touches more bytes per access. Big-O is the same; constant factor decides.
Exercise 4 - The cliff
For a typical desktop with 1 MB L2:
- 100 000
u64= 800 KB → fits in L2 → ~1 ns/elem. - 1 000 000
u64= 8 MB → spills L2 into L3 → ~2-4 ns/elem.
Compute the fraction of the budget by ratio. At 30 Hz (33 333 µs), 1M elements at 1 ns each is 1000 µs ≈ 3% of the budget. At 4 ns each, 4000 µs ≈ 12% of the budget. The cliff is real.
Exercise 5 - Working backwards
60 Hz tick: 16 666 µs = 16 666 000 ns. 100 000 entities × one cache line each. A cache line takes ~1-3 ns to load if sequential (L2/L3) or ~20-100 ns if random (RAM).
Sequential: 100 000 × 2 ns = 200 µs = 1.2% of the tick. Lots of headroom. Random RAM: 100 000 × 50 ns = 5 000 µs = 30% of the tick. Tight but possible. Random pointer-chase to scattered allocations: 100 000 × 100 ns = 10 000 µs = 60% of the tick. One inner loop, sixty percent. No headroom for anything else.
The lesson: ask whether the access is sequential before estimating.
Exercise 6 - A bad design
The classic: a graph of Box<Node> allocated by many small calls to Box::new, then iterated by following pointers. Each node is a separate heap allocation, scattered across the heap by the allocator. A million-node “linked structure” is a million RAM round-trips per traversal: 100 ns × 10⁶ = 100 ms - three full 30 Hz ticks for one traversal.
The same data laid out as a Vec<Node> (or, better, as SoA: Vec<u32> of values plus Vec<u32> of next-indices) traverses in 1-2 ms - fifty times faster, same algorithm, different layout. This is the whole book’s premise in one number.
Exercise 7 - Find your CPU’s TDP
Typical 2026 ranges:
- AMD Ryzen 9 mobile (e.g. 7940HS, 8945HS): cTDP 35-54 W (configurable).
- AMD Ryzen 9 desktop (e.g. 9950X): TDP 170 W; PPT (sustained) up to 230 W.
- Intel Core i9-13900H (mobile): PL1 45 W, PL2 115 W.
- Apple M3 Pro: roughly 25-35 W under sustained load.
A “TDP” number is the sustained envelope; burst (PL2 on Intel, PPT on AMD) can run 1.5-3× higher for tens of seconds before thermal/PPT limits clamp it back. For a sim that runs continuously, the sustained number is the budget that matters.
Exercise 8 - Battery budget
50 Wh ÷ 8 W = 6.25 hours. 50 Wh ÷ 14 W = ~3.57 hours.
The 75% rise in average draw (8→14 W) cuts battery life by 43%. A layout change that pushes loads to RAM is not a footnote on the time budget; it is a roughly halving of how long the laptop runs on one charge.
Exercise 9 - Measure delta power
The workload generator at code/measurement/src/bin/power_loop.rs takes one argument (sequential or random) and runs the chosen workload in a tight loop for 45 s - long enough to outlast a 30 s perf stat window comfortably. Build once with cargo build --release --bin power_loop inside code/measurement/, then run from a terminal:
# Terminal 1: pick a mode
cargo run --release --bin power_loop -- sequential
# (or: cargo run --release --bin power_loop -- random)
# Terminal 2: measure during a fresh start of the workload
sudo perf stat -a -e power/energy-pkg/ -- sleep 30
For the idle reading, run the perf command with no workload running. Permissions: sudo is usually required; sudo sysctl kernel.perf_event_paranoid=0 is the alternative if you don’t want to keep typing the password.
Reading the power_loop output
The binary prints something like:
sequential: summing 10000000 u64 elements in order for 45s
done: 29131 iterations in 45.000658338s - sum = 291310000000 ...
From the iteration count you can compute throughput:
elements per second = iterations × N / wall time
= 29131 × 10_000_000 / 45 s
= 6.47 × 10⁹ elements/s
read bandwidth = elements/s × 8 bytes
= 52 GB/s
ns per element = wall time / total elements
= 45 × 10⁹ ns / (29131 × 10⁷)
= 0.15 ns/element
52 GB/s is close to the practical peak of dual-channel DDR5-5600 (~60 GB/s sustained from a typical workload). The loop is bandwidth-bound: the CPU can consume bytes faster than the memory subsystem can deliver them, so the prefetcher and SIMD are saturating the channel. There is essentially no slack left in the sequential read path on this hardware.
The random-access run will show a very different number. Expect the iteration count to drop by a factor of 50-300, because each element costs a full RAM round-trip (~50-100 ns) instead of being delivered in a sequential stream (~0.15 ns).
Reading the perf stat output
perf stat -a -e power/energy-pkg/ -- sleep 30 prints something like:
56.58 Joules power/energy-pkg/
30.001766291 seconds time elapsed
Compute average watts:
average watts = joules / seconds = 56.58 / 30 = 1.89 W
That is the package power for the whole 30-second window, including all process activity on the machine. The per-process number is rarely what you want; the package-level number is what your battery, cooling fan, and electricity bill see.
Typical numbers
- Idle (trimmed Linux install): 2-8 W. A Ryzen 9 mobile on Arch Linux with no background work reports 1.89 W in one of this book’s draft sessions - exceptional but real. The cores are spending most of the window in deep C-states.
- Sequential
power_loop: idle + 5-10 W. Bandwidth-bound: memory controller and SIMD units are working hard but the CPU also drops clocks during the prefetcher’s brief refills. High utilisation but not thermally maxed. - Random
power_loop: idle + 10-25 W. Memory subsystem is working similarly hard, but now CPU stalls on every access cannot be filled by the prefetcher. Stalls do not save power if the rest of the chip stays active - clocks remain elevated while waiting for lines.
For perspective, the chip’s cTDP is 35-54 W. That is the sustained envelope under heavy load, not a soft cap; bursts can briefly exceed it.
The lesson
Sequential vs random over the same data, the same size, the same arithmetic:
- ~300× difference in time per element (0.15 ns vs ~50 ns)
- ~2-3× difference in instantaneous watts
- ~600-1000× difference in joules per element processed
Notice that the energy ratio is the product of the time ratio and the power ratio. Energy is power × time; when a layout choice slows things down and draws more watts, the two effects compound multiplicatively. A workload that is 300× slower and 3× more power-hungry is 900× more energy-expensive - not 303×. Slow workloads pay twice: once in elapsed seconds, once in watts per second.
Layout-aware programming is power-aware programming. The bandwidth-bound path keeps the chip cool and fast; the latency-bound path keeps it hot and slow. Two paths, one chip, one decision: where does the data sit?
Exercise 10 - Joules per access
10⁷ sequential u64 reads: each line carries 8 elements, so 1.25 × 10⁶ line loads. Most are served from the prefetcher’s pipeline (effectively L1-priced after the first miss in a stream), so use ~0.5 nJ per element on average. Total: 10⁷ × 0.5 nJ = 5 mJ.
10⁷ random u64 reads: every access is a fresh L3-or-RAM miss. Use ~30 nJ per element. Total: 10⁷ × 30 nJ = 300 mJ.
Ratio: 60×.
As a fraction of a 50 Wh battery (50 × 3600 = 180,000 J):
- Sequential: 5 × 10⁻³ J / 180,000 J ≈ 2.8 × 10⁻⁸ of a charge - negligible per run.
- Random: 300 × 10⁻³ J / 180,000 J ≈ 1.7 × 10⁻⁶ of a charge - still small per run.
The absolute numbers are tiny; the ratio is what scales. Run that loop ten million times a day across a fleet of devices and the choice of layout becomes the difference between a noticeable cooling-fan hum and a silent machine - and, at data-centre scale, a measurable line item on the electricity bill.
Exercise 11 - The budget is a curve
From exercise 5, the per-tick cost is one cache line per entity. Hold that fixed and the tick time is linear in the count: if 100 000 entities cost c per tick, then N entities cost c · N / 100 000, and the sustainable rate is 1 / tick_time, which falls as one over N.
Take a round example: say the 100 000-entity loop runs in 2 ms (well inside the 16.7 ms / 60 Hz budget). Then:
| entities | tick time | sustainable rate |
|---|---|---|
| 100 000 | 2 ms | 500 Hz |
| 300 000 | 6 ms | 167 Hz |
| 1 000 000 | 20 ms | 50 Hz |
| 3 000 000 | 60 ms | ~17 Hz |
The rate crosses 30 Hz between 1M and 1.7M entities (33.3 ms / (2 ms / 100 000) ≈ 1.67M); it crosses 15 Hz at about 3.3M (66.7 ms ÷ 20 ns per entity). Plotted, rate against size is a 1/N hyperbola - halve nothing, double the work, halve the rate.
The point is the shape, not the exact numbers (your c depends on your machine): a budget is a curve, and “the largest scale that still meets 15 Hz” is a number you read off it. This is the same curve Part II measures directly on the simulator, where the per-entity cost is whatever the tick actually does rather than an assumed cache line; the slope is the same.
5 - Identity is an integer
Concept node: see the DAG and glossary entry 5.
Hand a programmer fifty-two cards and tell them to write code that shuffles, sorts, and deals. Ask how long.
Most will start drawing classes - Card, Deck, Hand, Player, maybe a Game - and quote you four hours. They are being honest. The class hierarchy is real work. There will be constructors, copy semantics, and a vague unease about whether Hand should hold pointers or values, whether Deck owns its cards or borrows them, whether shuffling should mutate the deck or return a new one.
The whole problem fits in three lines. The way it fits is the lesson of this section.
A deck of cards has three pieces of information per card: its suit (♠ ♥ ♦ ♣), its rank (A, 2, …, K), and its current location (in the deck, in someone’s hand, in the discard pile). That is three columns. The deck itself is fifty-two rows.
In Rust:
#![allow(unused)]
fn main() {
let suits: Vec<u8> = vec![ /* 52 entries: 0..4 */ ];
let ranks: Vec<u8> = vec![ /* 52 entries: 0..13 */ ];
let locations: Vec<u8> = vec![ /* 52 entries: 0=deck, 1=hand1, ... */ ];
}That is the deck. There is no Card struct. There is no Deck class. The card at index 17 has its suit at suits[17], its rank at ranks[17], and its current location at locations[17]. The card is the index.
Dealing a card from the deck to player 1 is one line:
#![allow(unused)]
fn main() {
locations[17] = 1; // card 17 is now in player 1's hand
}Asking what’s in player 1’s hand is one loop:
#![allow(unused)]
fn main() {
let mut hand: Vec<usize> = Vec::new();
for i in 0..52 {
if locations[i] == 1 {
hand.push(i);
}
}
}Asking how many cards are left in the deck is one counter:
#![allow(unused)]
fn main() {
let mut count = 0u32;
for i in 0..52 {
if locations[i] == 0 { count += 1; }
}
}Shuffling - the move students expect to be hard - is shuffling the order of indices. 0..52 becomes [7, 32, 1, 19, ...], and you read your way through the cards in that order:
#![allow(unused)]
fn main() {
let mut order: Vec<usize> = (0..52).collect();
fisher_yates(&mut order, &mut rng); // 5 lines, written below
}Look at what just happened. Nothing about the cards changed. suits[17], ranks[17], and locations[17] are exactly the values they were before. The shuffle moved indices, not data.
Sorting works the same way. To sort by suit then rank, you sort the indices by (suits[i], ranks[i]):
#![allow(unused)]
fn main() {
order.sort_by_key(|&i| (suits[i], ranks[i]));
}The cards do not move. Their identifiers are reordered.
That’s the deck of cards in maybe twenty lines of Rust. It includes shuffle, sort, deal, and several queries. It is not a stylistic shortcut; it is what a deck of cards is. The OOP version’s four hours of work was the cost of pretending a card was an object that owned its suit and rank, when actually a card is one number - an index - and its suit and rank are values stored in arrays at that index.
We call this identity-is-an-integer, and it is the precondition for every economy the rest of this book buys you. Persistence will work because tables are easy to serialise. Parallelism will work because indices are cheap to partition. Replay will work because a deck is just three arrays in a state. None of it works if you reach for class Card.
|
|
Note - The strong form, which we will return to later: sometimes you do not even need the index. The pair |
Exercises
The first time through, write everything from scratch in src/main.rs. Resist the urge to add a Card struct or helper methods. Three Vecs.
- Build the deck. Write
fn new_deck() -> (Vec<u8>, Vec<u8>, Vec<u8>)that returns the suits, ranks, and locations for a fresh, ordered deck (all 52 inlocation 0 = deck). - Print a card. Write
fn card_to_string(suit: u8, rank: u8) -> Stringthat returns strings like"A♠","10♥","K♦". Use it to print the whole deck. - Shuffle. Write a tiny LCG random function (one-liner) and use it to implement Fisher-Yates on a
Vec<usize>. Print the deck in shuffled order. Confirm by inspection that thesuits,ranks, andlocationsarrays are unchanged. - Sort by suit then rank. Sort the
ordervector so suits come out grouped, ranks ascending within each suit. Print again. Once again, the deck arrays are unchanged. - Deal a hand. Move the first 5 cards from the deck (location 0) to player 1 (location 1). Print player 1’s hand using
card_to_string. - Hand query. Write
fn cards_held_by(locations: &[u8], player: u8) -> Vec<usize>returning all card indices currently held by a given player. - Count by location. Write a function that returns counts grouped by location: how many in the deck, in each hand, in discard.
- Deal four hands. Deal 5 cards to each of players 1, 2, 3, 4. Print all four hands.
- (stretch) Drop the index. Rewrite
cards_held_byto returnVec<(u8, u8)>of (suit, rank) pairs directly - no indices. What does this make easier? What does it make harder? (Hint: you cannot move the cards back to the deck without knowing whichithey were.) - (stretch) The sort hazard. While player 1 is holding indices
[3, 17, 21, 28, 41], sort the deck arrays themselves (not just the order) by suit. What does player 1 think they hold now? This is the bug node 9 (“sort breaks indices”) was written for. Don’t fix it yet - observe it.
Reference solutions for exercises 1-3 in 05_identity_is_an_integer_solutions.md. Solutions for the rest follow the same shape.
What’s next
Exercise 10 leaves you with a bug. The next section (§9 - Sort breaks indices) is the fix; it teaches you to keep a stable id alongside the position so external references survive reordering.
Solutions: 5 - Identity is an integer
Reference solutions for the exercises in 05_identity_is_an_integer.md. Try the exercises first.
Exercise 1 - Build the deck
#![allow(unused)]
fn main() {
fn new_deck() -> (Vec<u8>, Vec<u8>, Vec<u8>) {
let mut suits = Vec::with_capacity(52);
let mut ranks = Vec::with_capacity(52);
let mut locations = Vec::with_capacity(52);
for s in 0..4u8 {
for r in 0..13u8 {
suits.push(s);
ranks.push(r);
locations.push(0); // 0 = in the deck
}
}
(suits, ranks, locations)
}
}The order of insertion sets the index-to-card mapping. Spades fill indices 0-12, hearts 13-25, and so on. The Ace of Spades is at index 0; the King of Clubs at index 51.
Vec::with_capacity(52) is a small but honest gesture: the size is known up front, so we ask for exactly that much memory. No reallocation, no surprise. This is constant-quantity behaviour - node 27 will explain why it matters at a million.
Exercise 2 - Print a card
#![allow(unused)]
fn main() {
const SUIT_CHARS: [&str; 4] = ["♠", "♥", "♦", "♣"];
const RANK_CHARS: [&str; 13] = [
"A", "2", "3", "4", "5", "6", "7", "8", "9", "10", "J", "Q", "K",
];
fn card_to_string(suit: u8, rank: u8) -> String {
format!("{}{}", RANK_CHARS[rank as usize], SUIT_CHARS[suit as usize])
}
fn print_deck(suits: &[u8], ranks: &[u8]) {
for i in 0..suits.len() {
println!("{:>2}: {}", i, card_to_string(suits[i], ranks[i]));
}
}
}The as usize casts are because Vec and array indexing want usize. Choose u8 for the columns because we’re never going to have 256 suits or ranks; the smaller width saves memory and keeps more of the deck in L1.
Exercise 3 - Shuffle
A tiny LCG, then Fisher-Yates over the index order:
#![allow(unused)]
fn main() {
// A Linear Congruential Generator. Not cryptographic. Fine for shuffling cards.
fn rand(state: &mut u64) -> u64 {
*state = state
.wrapping_mul(6364136223846793005)
.wrapping_add(1442695040888963407);
*state >> 32
}
fn shuffle(n: usize, seed: u64) -> Vec<usize> {
let mut order: Vec<usize> = (0..n).collect();
let mut state = seed;
for i in (1..n).rev() {
let j = (rand(&mut state) as usize) % (i + 1);
order.swap(i, j);
}
order
}
fn print_deck_shuffled(suits: &[u8], ranks: &[u8], order: &[usize]) {
for &i in order {
println!("{}", card_to_string(suits[i], ranks[i]));
}
}
}The print function takes suits, ranks, and order as &[u8] and &[usize] slices - none of them are mutated. The cards stay where they are. Only the traversal changes.
|
|
Note - A real shuffle wants a stronger RNG; for fifty-two cards an LCG is fine. The exercise is about the indices, not the entropy. When you have an excuse to use a real RNG, the from-scratch test (node 40) applies: write the LCG version first, then read whatever crate you might reach for, and pick consciously. |
Exercises 4-8
Same shape. The pattern is:
- Whatever query you want is a
forloop over an index range, asking the columns at each index. - Whatever rearrangement you want is a permutation of the order vector, leaving the columns unchanged.
- A “move” - dealing, discarding - is a write to
locations[i], never a copy of the card.
If you find yourself constructing a Card struct to make exercise 8 cleaner, stop. The four hands together are simply a Vec<u8> of length 52 (the existing locations array) with values 0..5. Printing each hand is cards_held_by(&locations, p) for p in 1..=4.
Exercises 9-10
Both are bridges into the next sections.
- Exercise 9 (drop the index) is a preview of nodes 6 (row is a tuple) and the natural-key idea named in the strong-form note above. The (suit, rank) pair is the card; you don’t need an integer to refer to it. But moving it back to the deck is now harder, because you’ve lost the slot reference.
- Exercise 10 (the sort hazard) is the bug that motivates §9 - Sort breaks indices, which in turn motivates §10 - Stable IDs and generations. The bug shows up the moment you sort the data arrays themselves rather than the order vector. You need a stable name for a card that survives reordering - and that name is what node 10 introduces.
6 - A row is a tuple
Concept node: see the DAG and glossary entry 6.
In §5 you built a deck of 52 cards as three Vecs. The card at index 17 is the triple (suits[17], ranks[17], locations[17]). Together those three values are the row. There is no Card struct. The row exists implicitly in the alignment: the same index, used in every column, recovers all the data about one card.
This is what we call a row throughout the rest of the book - a coherent set of values that belong to the same entity. In a creature table the row is (pos[i], vel[i], energy[i], birth_t[i], id[i], generation[i]). In a food table it is (pos[i], value[i], id[i]). The fields belong to the same entity by virtue of all sharing index i. There is no struct holding them; there is only the discipline that whatever index i you used to read one column, you also use to read every other column of the same table.
The cost of implicit binding is that you must keep the indices aligned. If you sort ranks without also sorting suits and locations, you corrupt the column: the rank stored at a slot is no longer the rank of the card whose suit and location sit beside it. The deck still has 52 entries in 52 slots, but the slots no longer describe coherent cards. This is not a hypothetical bug; §9 will produce it deliberately so you can feel the consequences. The structural fix in this book is simple: every operation that reorders any column of a table must reorder all columns of that table together.
The discipline that makes alignment maintainable is single-writer-per-column. If only one system writes to locations, and that system writes consistently, alignment is never violated. Multiple writers to the same column race against each other and produce inconsistent rows. This is what node 25 (one writer, many readers) enforces: each table is written by exactly one system, and a row is a tuple precisely because that one writer kept all its columns in step.
A row is a tuple - assembled from columns indexed by the same entity, kept aligned by discipline rather than by any container holding it together.
Exercises
These extend your src/main.rs from §5.
- Print row 17. Write
fn row(suits: &[u8], ranks: &[u8], locations: &[u8], i: usize) -> (u8, u8, u8). Use it to print the suit, rank, and location of card 17. - Mishandle the alignment. Sorting
suitshere would do nothing - the deck was built with suits already in order, sosuits.sort()is a no-op that quietly hides the trap. Sort onlyranksinstead (ranks.sort(), no order vector), leavingsuitsandlocationsuntouched. Print rows 5 and 17. Row 5 is plainly broken: its suit and location still belong to card 5, but its rank was overwritten by another card’s. Row 17 looks fine, because slot 17 happens to hold rank 4 both before and after the sort. The column is corrupted either way; the surviving slot only proves that one spot-check is not a test. - Lockstep sort. Reset the deck. Now sort all three columns together by rank, using an order vector (the technique from §10): build
order, sort it byranks[i], then rebuild every column through that one order. Print rows 5 and 17 again. Whatever card now sits in a slot, its suit, rank, and location moved there together, so the row is coherent again. - Add a fourth column. Add
let mut dealt_at: Vec<u32> = vec![u32::MAX; 52];(when a card is dealt, write the current tick number intodealt_at[i]). Modify your lockstep sort to also reorder this column. Verify by spot-check that a row is still consistent after a sort. - The single-writer rule. Write
fn reorder_deck(suits: &mut Vec<u8>, ranks: &mut Vec<u8>, locations: &mut Vec<u8>, dealt_at: &mut Vec<u32>, order: &[usize]). This function is the only one that should ever reorder any column of the deck. Document that contract in a comment above the function. - (stretch) When alignment is moot. A query that uses only
(suits[i], ranks[i])to identify a card - for instance, “is this the Ace of Spades?” - does not depend onlocationsordealt_at. Write such a query. The natural-key view from §5’s strong form means this query survives reorderings of unrelated columns; onlysuitsandranksneed to be aligned with each other.
Reference notes in 06_a_row_is_a_tuple_solutions.md.
What’s next
§7 - Structure of arrays (SoA) names the layout choice you have been making implicitly: each field its own column. The next section defends that choice against its alternative.
Solutions: 6 - A row is a tuple
Exercise 1 - Print row 17
#![allow(unused)]
fn main() {
fn row(suits: &[u8], ranks: &[u8], locations: &[u8], i: usize) -> (u8, u8, u8) {
(suits[i], ranks[i], locations[i])
}
let (suits, ranks, locations) = new_deck();
let (s, r, l) = row(&suits, &ranks, &locations, 17);
println!("row 17: suit={s} rank={r} location={l}");
}The function does not look up by id; it looks up by slot. With a fresh deck the slot 17 holds a stable card, but as soon as the deck is sorted or rearranged, the same call returns a different card. That is the §9 lesson; here we only ask the slot what it holds right now.
Exercise 2 - Mishandle the alignment
#![allow(unused)]
fn main() {
// `suits` is already sorted by construction, so `suits.sort()` would change nothing.
// Sort `ranks` in isolation to actually reorder a column:
ranks.sort();
for i in [5, 17] {
let (s, r, l) = row(&suits, &ranks, &locations, i);
println!("row {i}: suit={s} rank={r} location={l}");
}
}After ranks.sort(), slot 5 still reads suit 0 and location 0 - those columns were untouched, so they are card 5’s - but its rank is now 1, dragged in from a different card. The row no longer describes any real card. Slot 17 reads suit 1, rank 4, location 0, exactly as before: the four rank-4 cards occupy slots 16 through 19 both before and after the sort, so this one slot survives by coincidence. Note that only one column moved, so a broken row mixes two cards, not three; the real danger is that inspecting a single lucky slot like 17 would tell you nothing is wrong.
Exercise 3 - Lockstep sort
#![allow(unused)]
fn main() {
let mut order: Vec<usize> = (0..52).collect();
order.sort_by_key(|&i| ranks[i]);
suits = order.iter().map(|&i| suits[i]).collect();
ranks = order.iter().map(|&i| ranks[i]).collect();
locations = order.iter().map(|&i| locations[i]).collect();
}Every column is rebuilt through the same order, so whichever card lands in slot 5 or 17 brings its suit, rank, and location with it. The slot’s three fields agree on one card again. The fix is structural: one order vector, applied to every column, can never produce the mismatch from exercise 2.
Exercises 4-6 - Sketches
Exercise 4. dealt_at is just a fourth column. Add it to the lockstep sort. Spot-check by setting dealt_at[7] = 42 before the sort, then verifying that after the sort dealt_at[new_slot] is still 42 for that same card (find it via the id column from §10).
Exercise 5. The reorder_deck function takes &mut references to all four columns plus &[usize] order. Inside, it does the four iter().map(...).collect() lines. The contract in the comment: “any reorder of the deck must use this function. Direct calls to Vec::sort() or Vec::swap() on individual columns are forbidden, even if they happen to compile.”
Exercise 6. A natural-key query like is_ace_of_spades(s, r) reads only suits[i] and ranks[i] without caring what locations[i] says. The locations column can be reordered independently and the query remains correct - provided suits and ranks stay aligned with each other. Two-of-three alignment is sometimes acceptable; full alignment is the only state in which all queries are valid. Reasoning about partial alignment is fragile and rarely worth the complexity.
7 - Structure of arrays (SoA)
Concept node: see the DAG and glossary entry 7.
Your deck has three Vecs: suits, ranks, locations. Each field lives in its own array, indexed by entity. This layout is called Structure of Arrays - SoA. The opposite layout - a single Vec<Card> where each element is a struct holding all three fields - is called Array of Structs - AoS. They are different choices about where the same data lives.
#![allow(unused)]
fn main() {
// SoA: three columns, indexed in lockstep
let suits: Vec<u8> = vec![/* 52 */];
let ranks: Vec<u8> = vec![/* 52 */];
let locations: Vec<u8> = vec![/* 52 */];
// AoS: one column of structs
struct Card { suit: u8, rank: u8, location: u8 }
let cards: Vec<Card> = vec![/* 52 */];
}Most programmers reach for AoS by default because it groups “related” data together. The trouble is that in a real loop “related” is whatever the inner loop reads, not whatever the data model says belongs together. A system that counts cards in player 1’s hand reads only locations - it does not need suits or ranks at all. With SoA, that loop reads exactly 52 bytes from locations. With AoS, the loop reads all three bytes of each Card (because they live next to each other in memory and arrive on the same cache line) and ignores two of them - three times the memory traffic for the same answer.
At 52 cards the difference is invisible. At one million creatures with six fields each, the difference is the difference between a 30 Hz simulation and a 5 Hz one1. The motion system in §1’s simulator reads only pos, vel, and energy - three of six creature fields. With SoA it reads three sequential streams of exactly the bytes it needs. With AoS it reads all six fields of every creature, paying twice the memory bandwidth for half the data it actually wants.
This is the bandwidth-bound regime named in §4. SoA keeps the inner loop’s working set small; AoS bloats it with fields the loop ignores. At cache-spilling sizes (any working set bigger than L3) the bloat becomes the dominant cost.
SoA is therefore the default in this book. AoS is sometimes the right choice - for example when every system reads every field, or when N is so small the cache line is dominated by per-row overhead either way. But this is a tradeoff to earn by measurement, not to assume by habit. Write SoA first; switch to AoS only when a benchmark forces you to.
Measurements
How far SoA beats a padded array-of-structs grows with the cache budget: the small-cache Pi pays for every wasted byte (5.7x), a modern desktop with generous L3 mutes it (1.6x). The principle holds on every machine. Full output: code/README.md.
| # | measurement | Ryzen 9 (modern) | i7-3610QM (2012) | i3-5010U (2015) | Pi 4 |
|---|---|---|---|---|---|
| 1 | SoA vs padded AoS, count loop at 10M (row 3 B → 20 B) | 1.6x | 2.4x | 1.9x | 5.7x |
Exercises
You will need a stopwatch (std::time::Instant) for some of these.
- Build both layouts. Take your §5 deck and add an AoS twin: a
Vec<Card>of 52 entries, whereCard { suit: u8, rank: u8, location: u8 }. Build both and verify they hold the same logical content. - Count cards in a player’s hand, both ways. Write
fn count_held_soa(locations: &[u8], player: u8) -> usizeandfn count_held_aos(cards: &[Card], player: u8) -> usize. Confirm they return the same number on the same deck. - Time the count at 10,000 entries. Make
Vec<u8>andVec<Card>of length 10,000 (replicate the deck 192-fold, or fill arbitrarily). Time eachcount_held_*function. Note the ratio. - Scale to 1,000,000 entries. Repeat at length 1,000,000. The SoA version reads 1 MB; the AoS version reads 3 MB (assuming
size_of::<Card>() == 3plus padding). On most chips L2 fits one but not the other. Note where the cliff appears. - The wide-field case. Extend the row with a 16-byte
nickname: [u8; 16]. Rebuild both. Now AoS reads 19+ bytes per element while SoA still reads 1. Time the count again. The gap should widen sharply.
|
|
Note - How sharp depends on your memory hierarchy. Measured ratios at N=10M: ~2× on machines with generous L3 (modern desktops, mid-2010s Intel laptops), ~6× on a Raspberry Pi 4 (no L3, narrow LPDDR4 channel). The principle is the same; the slope of the cliff scales with how badly the AoS row blows the cache budget. |
- A case where AoS wins. Write a function that updates every field of one specific card. SoA writes to three different lines; AoS writes to one. For the case “update every field of every card” (rare in practice), AoS may even tie or win. Time it and discuss.
- (stretch) A from-scratch
SoaDeckstruct. Wrap the three (or four) columns in one struct that owns them all. Providefn reorder(&mut self, order: &[usize])as the only public mutator. What do you gain in correctness? What do you lose in flexibility?
Reference notes in 07_structure_of_arrays_solutions.md.
What’s next
§8 - Where there’s one, there’s many is the universalising principle. The deck taught it implicitly; the next section names it.
Solutions: 7 - Structure of arrays (SoA)
Exercise 1 - Build both layouts
#![allow(unused)]
fn main() {
struct Card { suit: u8, rank: u8, location: u8 }
// SoA
let (suits, ranks, locations) = new_deck();
// AoS
let cards: Vec<Card> = (0..52)
.map(|i| Card {
suit: suits[i],
rank: ranks[i],
location: locations[i],
})
.collect();
}Note std::mem::size_of::<Card>() is 3 in theory but Rust may pad to 4 for alignment unless you #[repr(packed)] (which has its own hazards). For the timing exercises below, that 3-vs-4 detail does not change the qualitative result.
Exercises 2-3 - Counting and timing
#![allow(unused)]
fn main() {
fn count_held_soa(locations: &[u8], player: u8) -> usize {
let mut n = 0;
for &l in locations { if l == player { n += 1; } }
n
}
fn count_held_aos(cards: &[Card], player: u8) -> usize {
let mut n = 0;
for c in cards { if c.location == player { n += 1; } }
n
}
}Both compile to tight loops. The SoA loop reads one byte per iteration; the AoS loop reads sizeof(Card) bytes per iteration even though it only inspects one field. For 10,000 entries the AoS loop is roughly 3-4× slower; for 1,000,000 the gap widens further as the AoS working set spills more cache levels.
Exercise 4 - The cliff
At 1,000,000 entries: SoA is 1 MB (fits L2 on most chips); AoS at 4 bytes/Card is 4 MB (out of L2, into L3). At 10,000,000 SoA still fits L3; AoS does not. Each cache transition is a sharp slowdown for AoS while SoA continues at near-L2 speed.
Exercise 5 - The wide-field case
Add nickname: [u8; 16] to Card. Now size_of::<Card>() ≥ 19 (will pad to 20 or 24 for alignment). The AoS count loop reads 24 bytes per element while SoA still reads 1. The ratio is no longer ~3-4× - it is ~20×. This is the whole point of SoA: a field a loop does not read sits in its own column, untouched, costing no bandwidth. There is no row to drag it along with - which is exactly why a structure-of-arrays world never needs a separate hot/cold field split.
Exercise 6 - When AoS wins
#![allow(unused)]
fn main() {
fn touch_all_fields_aos(cards: &mut [Card], i: usize) {
cards[i].suit = (cards[i].suit + 1) % 4;
cards[i].rank = (cards[i].rank + 1) % 13;
cards[i].location = 0;
}
fn touch_all_fields_soa(suits: &mut [u8], ranks: &mut [u8], locations: &mut [u8], i: usize) {
suits[i] = (suits[i] + 1) % 4;
ranks[i] = (ranks[i] + 1) % 13;
locations[i] = 0;
}
}For a single card, AoS touches one cache line; SoA touches three (one per column). For a million cards iterated in order, both layouts stream their data through cache and the difference is small - but the SoA version uses 3× the cache lines per iteration. This is the reverse of exercise 2 and is the case where AoS may win.
In practice this case is rarer than it sounds. Most systems read or write only a subset of fields per pass; the situations where every field is touched together usually live at the boundary (deserialise the row, write it to disk) rather than in the inner loop.
Exercise 7 - SoaDeck sketch
#![allow(unused)]
fn main() {
struct SoaDeck {
suits: Vec<u8>,
ranks: Vec<u8>,
locations: Vec<u8>,
}
impl SoaDeck {
fn reorder(&mut self, order: &[usize]) {
self.suits = order.iter().map(|&i| self.suits[i]).collect();
self.ranks = order.iter().map(|&i| self.ranks[i]).collect();
self.locations = order.iter().map(|&i| self.locations[i]).collect();
}
// Read accessors; no per-column mutators exposed.
}
}What you gain: the only way to reorder is through reorder, which takes all columns at once - alignment is enforced by the type system. What you lose: a system that wants to mutate just locations cannot do so without going through the wrapping struct or breaking the encapsulation. You have moved the alignment discipline from a code-review concern to a type-system concern, at the cost of some flexibility. This is mechanism-vs-policy (§40) - choose where the rule lives.
8 - Where there’s one, there’s many
Concept node: see the DAG and glossary entry 8.
Code is written for the array. A function that operates on one entity is just the special case of N = 1; it does not need its own abstraction. A card game with 52 cards is three arrays - suit, rank, location - not 52 objects. A simulation with 100 creatures is six arrays of length 100, not 100 instances of Creature. The plural is the primary unit; the singular is the trivial case.
The pattern is simple. Write the array version first. The singleton drops out as a one-element slice. To shuffle one card you swap two indices in the order vector - same as shuffling the whole deck. To find the highest-rank card in player 1’s hand you scan the (small) hand vector - same shape as scanning all 52. To deal one card you write one cell in locations - same shape as dealing many cells.
This stands against an instinct most programmers acquire from OOP: the urge to write card.shuffle() or creature.update() and then puzzle over how to do it for many. The puzzle does not exist when you write for arrays from the start. shuffle(&mut deck) is one function that works for any deck, including a deck of one. update(&mut creatures) is one function that works for any population, including a population of one.
A useful test: when you find yourself writing a method on a struct, ask what does this look like over an array? If the array version is shorter, drop the method. If the array version is the same length, keep the method as a function over a slice - fn shuffle(deck: &mut Deck), not impl Deck { fn shuffle(&mut self) }. Either way, the singleton was never the right unit of code.
There is also a cost reason, though it does not bite at 52 cards. A method that runs on one entity at a time forces its caller to invoke it N times: N opaque calls the optimiser cannot fuse into a loop. A function over a slice is one call - the compiler sees the whole loop and can lift invariants, reorder, and vectorise it. Writing for the array keeps the work visible to the optimiser; writing for the singleton hides it. The bill for that hiding does not arrive until the simulator is walking a million rows a tick, and §19 measures it there. At deck scale this is a reason to prefer the array form, not yet a speed you can feel.
“Where there’s one, there’s many” is therefore not an architectural slogan but a daily practice. It costs nothing the first time. It costs everything the first time you forget.
Exercises
These extend the deck again. The aim is to feel the array-first pattern in your fingertips before §5 turns into the rest of the book.
- The function over a slice. Write
fn highest_rank_in_hand(hand: &[u32], ranks: &[u8]) -> Option<u8>returning the highest rank held in the supplied set of card ids. Use it on a 5-card hand. Then use it on a 1-card hand. Then use it on an empty hand. Same function, three N values. - Reverse the urge. Given an OOP-style
Card::is_face_card(&self) -> bool, rewrite it asfn face_cards(ranks: &[u8]) -> Vec<bool>- a function over the wholeranksarray returning a parallel mask. Apply it to all 52 cards in one call. - The N = 0 case. What does
highest_rank_in_handdo for an emptyhand? Should it panic, returnNone, or return some sentinel? Pick one and justify. - Predicate over a single value. Suppose you want
is_red(suit: u8) -> boolfor a single card (suits 0 and 1 are hearts/diamonds). Write the array versionfn red_mask(suits: &[u8]) -> Vec<bool>first. Then convince yourself the singleton case isred_mask(&[suit])[0]- the array version covers it. - (stretch) From a tutorial. Find any Rust tutorial that uses a
struct Cardwith methods (new,is_face,display, etc.). Rewrite their full card game as three (or four)Vecs plus free functions. Compare line counts. Compare clarity. Compare what happens when you want to query “all face cards across the table” - one function call versus a loop over per-card method calls.
Reference notes in 08_where_theres_one_theres_many_solutions.md.
What’s next
You have closed Identity & structure. Cards behave; rows align; layouts are SoA; the singleton drops out. The next phase is Time & passes, starting with §11 - The tick. The ecosystem simulator from code/sim/SPEC.md is about to start running.
Solutions: 8 - Where there’s one, there’s many
Exercise 1 - The function over a slice
#![allow(unused)]
fn main() {
fn highest_rank_in_hand(hand: &[u32], ranks: &[u8]) -> Option<u8> {
let mut best: Option<u8> = None;
for &id in hand {
let r = ranks[id as usize];
best = match best {
None => Some(r),
Some(b) => Some(b.max(r)),
};
}
best
}
let hand5: Vec<u32> = vec![3, 17, 21, 28, 41];
let hand1: Vec<u32> = vec![41];
let hand0: Vec<u32> = vec![];
println!("{:?}", highest_rank_in_hand(&hand5, &ranks)); // Some(some rank)
println!("{:?}", highest_rank_in_hand(&hand1, &ranks)); // Some(ranks[41])
println!("{:?}", highest_rank_in_hand(&hand0, &ranks)); // None
}One function. Three N values. The N = 1 and N = 0 cases are not special-cased; they fall out.
Exercise 2 - Reverse the urge
#![allow(unused)]
fn main() {
fn face_cards(ranks: &[u8]) -> Vec<bool> {
ranks.iter().map(|&r| r >= 10).collect() // 10 = J, 11 = Q, 12 = K (0-indexed)
}
}Compared to a per-card Card::is_face_card(&self) -> bool plus a loop, the array version is shorter, more cache-friendly, and trivially vectorisable.
Exercise 3 - The N = 0 case
Option<u8> returning None is the cleanest answer. A panic is hostile to callers (the empty case is a valid state of the world - a player just played their last card). A sentinel like 255 confuses the type. Option makes the absence visible at the type level.
Exercise 4 - Singleton as trivial array
#![allow(unused)]
fn main() {
fn red_mask(suits: &[u8]) -> Vec<bool> {
suits.iter().map(|&s| s < 2).collect() // suits 0,1 = hearts, diamonds
}
let one_suit = 0u8;
let is_red_one = red_mask(&[one_suit])[0]; // true
}The singleton drops out as a one-element call. There is no separate is_red(suit: u8) -> bool function. If the call site is ergonomic enough you may write a thin wrapper for clarity, but the array version is the canonical implementation.
Exercise 5 - From a tutorial
This is open-ended. The expected outcome: the rewritten array-first version is shorter, has fewer indirections, and answers cross-cutting queries (all face cards on the table; all spades in any hand) in one function call rather than a loop over methods.
A typical OOP card game tutorial weighs around 200-400 lines. The array-first rewrite of the same functionality usually lands at 80-150 lines, with the bulk of the savings coming from not writing getters, setters, copy semantics, and the various small accessors that an OOP Card accumulates.
9 - Sort breaks indices
Concept node: see the DAG and glossary entry 9.
In §5 - Identity is an integer, exercise 10 left you with a bug. Player 1 was holding the index list [3, 17, 21, 28, 41]. The dealer sorted the deck columns by suit. Player 1’s hand was now wrong - the same indices, the same slots, but different cards.
That bug is the structural fact this section names. Sorting did not damage anything; the player’s reference was never robust to begin with. An index points at a slot, not at a thing. When the slot’s contents change, the index quietly changes meaning.
It is not only sorting. Any rearrangement does it: swap_remove (a O(1) deletion that moves the last row into the freed slot, coming in §21), reshuffling for locality (§28), compacting after a batch of deletions. The same index, the same array, the same line of code, now means a different card.
This is uncomfortable. In OOP you held a Card reference and the card stayed put because Card was a thing. In data-oriented code the card is the slot, and the slot does not have permanent meaning. The card you saved a reference to yesterday may be a different card today, if the deck has been touched.
There are two ways forward. The lazy one is to never rearrange the deck. That works for fifty-two cards, fails for ten thousand creatures, and becomes catastrophic for a million. The book is going to need rearrangements - sorting, deletion, compaction - at every scale beyond §0. So we need the other fix: a stable name that survives the slot it currently occupies.
That is what §10 - Stable IDs and generations does. This section’s only job is to make the slot vs name distinction concrete enough that §10’s solution feels inevitable rather than ceremonial.
|
|
Note - Why feel the pain first? Because the fix in §10 is small - one extra column - and small fixes only stick if the student knows what they fix. Reading “always store an id” without first feeling the bug produces students who add ids cargo-culted, then drop them when the codebase looks too cluttered. Reading it after watching player 1 lose their hand produces students who never drop them. |
Exercises
You should still have your src/main.rs from §5. These exercises extend it.
- Reproduce the bug. With player 1 holding
[3, 17, 21, 28, 41], sort the deck columns themselves (suits,ranks, andlocationsin lockstep) by suit. Print player 1’s hand usingcard_to_string. Confirm the cards have changed. - A second rearrangement. Instead of sorting, swap two cards’ positions:
Print player 1’s hand again. Same bug shape, different cause.#![allow(unused)] fn main() { suits.swap(3, 17); ranks.swap(3, 17); locations.swap(3, 17); } - A third rearrangement. Remove the card at slot 3 with
swap_remove(3)on each column. Print player 1’s hand. Note that the cards at slots[17, 21, 28, 41]are unchanged but slot 3 may now hold what was previously the last card; meanwhile slot 51 has silently been deleted. - Quantify the breakage. Write a function that takes the original
[3, 17, 21, 28, 41]plus a freshly built deck, applies a Fisher-Yates shuffle to the deck columns themselves, and counts how many of the five references still point at the same(suit, rank)value. Run it 100 times. Roughly what fraction of references survive a random shuffle of the deck? - A reference that can survive. Without writing any new code - on paper - describe what kind of reference would survive a shuffle. (Hint: you already know. The card’s
(suit, rank)is unique to that card. The reference that survives is the one that does not depend on the slot.) - (stretch) The cost of never rearranging. Suppose you decide to never sort, swap, or remove from the deck columns, to avoid this bug forever. How would shuffling work? How would discarding a card work? Why does this not scale to ten thousand creatures?
Reference notes for these exercises in 09_sort_breaks_indices_solutions.md.
What’s next
Exercise 5 points at the answer; exercise 6 makes the never-rearrange option look bad. The real fix is to store identity separately from position - an id column that travels with the row across rearrangements, with a generation counter on top for variable-quantity tables. §10 - Stable IDs and generations builds it.
Solutions: 9 - Sort breaks indices
Reference notes for the exercises in 09_sort_breaks_indices.md. These exercises are mostly about observing the bug; there is little new code. Work them first - the lesson is felt, not read.
Exercise 1 - Reproduce the bug
#![allow(unused)]
fn main() {
let (mut suits, mut ranks, mut locations) = new_deck();
let player_1_hand = vec![3, 17, 21, 28, 41];
// Sort the deck columns themselves (in lockstep) by suit.
let mut order: Vec<usize> = (0..52).collect();
order.sort_by_key(|&i| suits[i]);
suits = order.iter().map(|&i| suits[i]).collect();
ranks = order.iter().map(|&i| ranks[i]).collect();
locations = order.iter().map(|&i| locations[i]).collect();
for &i in &player_1_hand {
println!("{}", card_to_string(suits[i], ranks[i]));
}
}Compare what prints now with what printed before the sort. The slots [3, 17, 21, 28, 41] still exist; their contents moved.
Exercise 4 - Quantify the breakage
After a uniform random shuffle, a fixed slot has a 1-in-52 chance of holding the same card it held before. Five references, five independent draws - expected survivors per shuffle is roughly 5/52 ≈ 0.10. Most runs have zero references survive. The bug is total, not partial.
Exercise 5 - A reference that can survive
The pair (suit, rank) is unique to each card. A reference that stores (suit, rank) rather than a slot index survives any rearrangement of the deck columns, because the pair is natural - it lives in the data itself, not in the slot. This is the strong form of §5 - Identity is an integer.
The price of natural keys is paid in §10: returning Vec<(u8, u8)> from a query is fine for reading, but to move a card (deal, discard) you still need to know which slot to write to. Surrogate ids generalise to cases where the data has no natural unique tuple.
Exercise 6 - The cost of never rearranging
Without rearranging:
- Shuffling must be implemented as a permutation in
order: Vec<usize>while the deck columns themselves stay in their original layout. This is what §5 actually did. It works. - Discarding means writing
locations[i] = DISCARDrather than removing the row. Logical removal via a flag, not structural removal. The deck never shrinks.
For 52 cards the deck-never-shrinks rule is fine. For 10,000 creatures with steady birth and death the table grows without bound; every system scans past dead rows; cache traffic doubles, then quadruples. The fix in §21 - swap_remove needs the stable references that §10 introduces in order to be safe to call.
10 - Stable IDs and generations
Concept node: see the DAG and glossary entry 10.
In §9 you watched a player’s reference go stale because they were holding slots, not names. The fix is to give each row a name - a stable identifier - that travels with the row when it moves.
A stable id is one extra column. For the deck:
#![allow(unused)]
fn main() {
let mut ids: Vec<u32> = (0..52).collect();
}Now every card has both a slot (its current index in the columns) and an id (its name). When you sort the columns, you reorder ids in lockstep:
#![allow(unused)]
fn main() {
// sort by suit, taking ids along
let mut order: Vec<usize> = (0..52).collect();
order.sort_by_key(|&i| suits[i]);
let new_suits: Vec<u8> = order.iter().map(|&i| suits[i]).collect();
let new_ranks: Vec<u8> = order.iter().map(|&i| ranks[i]).collect();
let new_locations: Vec<u8> = order.iter().map(|&i| locations[i]).collect();
let new_ids: Vec<u32> = order.iter().map(|&i| ids[i]).collect();
}The card with id = 17 is still the same card - its suit, rank, and location are unchanged. It is just at a different slot.
To find a card by id, scan the ids column:
#![allow(unused)]
fn main() {
fn slot_of(ids: &[u32], target: u32) -> Option<usize> {
for i in 0..ids.len() {
if ids[i] == target {
return Some(i);
}
}
None
}
}That is O(N), which is fine for a 52-card deck and slow for a million creatures. The fix - an id_to_slot map maintained on every rearrangement - is §23 - Index maps. For now the linear scan is honest pedagogy.
Generations: when slots are reused
The deck is constant-quantity. Always 52 cards, never more, never less. The simple id column is enough.
For variable-quantity tables - creatures that are born and die, packets that arrive and are processed, sessions that come and go - slots get reused. A new creature is born in the slot that just held a dead one. Now imagine a player who held a reference to the dead creature: their reference points at the same slot with the same id, but the row at that location is a different creature.
One more column fixes it: a generation counter that increments every time a slot is recycled. A reference is now a pair (id, generation). To dereference it, you check that the row’s stored generation still matches the reference’s generation. If it does, the reference is live. If it does not, the slot has been recycled since the reference was taken, and the dereference returns None.
#![allow(unused)]
fn main() {
struct CreatureRef {
id: u32,
generation: u32,
}
fn get(creatures: &Creatures, r: CreatureRef) -> Option<usize> {
let slot = creatures.id_to_slot.get(r.id as usize).copied()?;
if creatures.generation[slot] == r.generation {
Some(slot)
} else {
None
}
}
}This is the pattern called a generational arena. It is the single mechanism behind every “handle” type in every ECS engine: Bevy’s Entity, slotmap::SlotMap, C++’s entt::registry. They differ in details - width of the id, packing into a u64, generation overflow handling - but the structural idea is the same: one column for identity, one for generation, a checked dereference.
That is enough machinery for the rest of the book to lean on. Sorting now works because the id column travels with the row. Deletion now works because the generation counter rejects stale references. Append-only and recycling tables (§24) are two policies on the same machinery.
|
|
Note - The strong form of §5 still applies. If your row has a natural key - |
Exercises
These extend the §5 deck once more, then take a step toward the simulator’s variable-quantity case.
- Add the id column. Add
let ids: Vec<u32> = (0..52).collect();to your deck. Modify your sort so it reordersidsalong with the other columns. Verify the original ids are still there, just in a new order. - Find a card by id. Implement
slot_of(ids: &[u32], target: u32) -> Option<usize>as in the prose. Use it to look up the card withid = 17after a sort. - Resolve the §9 bug. With player 1 holding ids
[3, 17, 21, 28, 41](not slots), sort the deck. Useslot_ofto translate ids to slots and print the hand. Confirm the cards are unchanged. - Permutation-friendly hand query. Rewrite
cards_held_by(locations, ids, player) -> Vec<u32>to return ids, not slots. The player now holds names. Test by sorting the deck after a deal and confirmingcards_held_bystill returns the same five cards. - A first generation counter. Add
let mut generation: Vec<u32> = vec![0; 52];. The 52-card deck does not actually recycle, but extend a smallswap_remove-like operation: pop the last card from the deck (location 0), insert a “fresh” card at the freed slot, and bump that slot’sgenerationby one. Take aCreatureRef-style(id, generation)reference before the operation. After the operation, look up the slot by id; checkgeneration[slot]against the reference’sgeneration. Confirm the dereference correctly reports stale. - (stretch) A tiny generational arena. Outside the deck, build a
Creaturesstruct withpos: Vec<f32>,generation: Vec<u32>, plusfree: Vec<u32>of slots awaiting reuse. Implementinsert(pos) -> (slot, generation),remove(slot), andget(slot, generation) -> Option<f32>. Convince yourself by example that stale references cannot read a fresh creature’s data. - (stretch) Compare with
slotmap. Readslotmap::SlotMap::insertandget. Identify which of your fields and operations correspond. What doesslotmapadd that you didn’t need for the simulator? Decide consciously whether to adopt it. (This is the from-scratch-then-price-the-crate move from §41 - Deferred abstraction and §42 - You can only fix what you wrote.)
Reference solutions for the deck exercises (1-5) in 10_stable_ids_and_generations_solutions.md. The arena and slotmap exercises follow the same shape and are worth working without reference.
What’s next
You now have stable references. The next thing the simulator will need is to look up a row by id in O(1) rather than O(N) - an id_to_slot map maintained on every reordering. That is §23 - Index maps. It is one extra Vec<u32>, updated whenever the columns move.
Solutions: 10 - Stable IDs and generations
Reference solutions for the exercises in 10_stable_ids_and_generations.md. The deck exercises (1-3) are full; the rest are sketches.
Exercise 1 - Add the id column
#![allow(unused)]
fn main() {
fn new_deck_with_ids() -> (Vec<u8>, Vec<u8>, Vec<u8>, Vec<u32>) {
let mut suits = Vec::with_capacity(52);
let mut ranks = Vec::with_capacity(52);
let mut locations = Vec::with_capacity(52);
for s in 0..4u8 {
for r in 0..13u8 {
suits.push(s);
ranks.push(r);
locations.push(0);
}
}
let ids: Vec<u32> = (0..52).collect();
(suits, ranks, locations, ids)
}
fn sort_deck_by_suit(
suits: &mut Vec<u8>,
ranks: &mut Vec<u8>,
locations: &mut Vec<u8>,
ids: &mut Vec<u32>,
) {
let mut order: Vec<usize> = (0..suits.len()).collect();
order.sort_by_key(|&i| suits[i]);
*suits = order.iter().map(|&i| suits[i]).collect();
*ranks = order.iter().map(|&i| ranks[i]).collect();
*locations = order.iter().map(|&i| locations[i]).collect();
*ids = order.iter().map(|&i| ids[i]).collect();
}
}The four columns are reordered in lockstep. Failing to reorder one of them is the bug.
Exercise 2 - Find a card by id
#![allow(unused)]
fn main() {
fn slot_of(ids: &[u32], target: u32) -> Option<usize> {
for i in 0..ids.len() {
if ids[i] == target {
return Some(i);
}
}
None
}
}The for-loop is intentional. Iterators with position do the same thing in one line; the loop version is the one to read first.
Exercise 3 - Resolve the §9 bug
#![allow(unused)]
fn main() {
let (mut suits, mut ranks, mut locations, mut ids) = new_deck_with_ids();
// Player 1 holds *ids*, not slots
let player_1_hand: Vec<u32> = vec![3, 17, 21, 28, 41];
sort_deck_by_suit(&mut suits, &mut ranks, &mut locations, &mut ids);
for id in &player_1_hand {
let slot = slot_of(&ids, *id).expect("card vanished");
println!("{}", card_to_string(suits[slot], ranks[slot]));
}
}The output is the same five cards as before the sort - different slots, same cards. The §9 bug is gone.
Exercises 4-5 - Sketches
Exercise 4. cards_held_by(locations, ids, player) -> Vec<u32> walks the rows in lockstep and pushes ids[i] (not i) when locations[i] == player. Apply any rearrangement; the function still returns the same five ids. Using slot_of afterwards finds the cards.
Exercise 5. Take a (id, generation) reference before the swap-and-bump. After the operation, find the slot by id and read generation[slot]. The slot is the same; generation[slot] is 1 instead of 0; the reference’s generation is 0; the dereference reports stale. The 52-card deck does not feel motivated yet - the simulator’s creature table in §1 is where this stops feeling ceremonial.
Exercise 6 - A tiny generational arena
The shape:
#![allow(unused)]
fn main() {
struct Creatures {
pos: Vec<f32>,
generation: Vec<u32>,
id_to_slot: Vec<u32>, // id i -> current slot, or u32::MAX when removed
free: Vec<u32>, // slots awaiting reuse
next_id: u32,
}
}insert(pos) either pops a slot from free (bumping generation[slot]) or pushes a new slot. remove(slot) pushes the slot into free and bumps generation[slot]. get(slot, generation) returns Some(pos[slot]) only if self.generation[slot] == generation. The exercise is worth coding; the shape above is enough scaffolding.
Exercise 7 - Comparing with slotmap
slotmap::SlotMap does the same thing with prettier ergonomics: keys pack (slot, generation) into a u64, the API uses Index/IndexMut, removals return the removed value, iterators are provided. None of these are required for the simulator; they are nice. Whether to adopt depends on whether you trust the crate to keep working (§42). The from-scratch version above is small enough that you can fix it yourself if it ever breaks - which is the only reason to choose it over slotmap.
11 - The tick
Concept node: see the DAG and glossary entry 11.
A program’s life has a shape:
- Start-up - initialisation. Tables are allocated, inputs are opened, the RNG is seeded, the world reaches a known state.
- Steps - ticks of the clock in a simulation, turns in a card game, event handlers in a server. The repeating unit of forward motion.
- Save and load - the in-memory state is preserved to disk so a future run can resume from where this one left off. Optional, but if you want it, it lives here.
- Exit - resources are returned to the kernel. Memory, file handles, sockets, lockfiles. Failure to do this cleanly is called a memory leak (or a stale lock, or a broken socket).
This section is about the step. The step is where the time budget binds, where the systems - the functions that read and write the world’s tables - run in the order set by their DAG, where determinism either holds or breaks. The other phases are real and important - the book returns to save and load when persistence is named at §36, and exit is mostly the operating system’s job - but the inner step is what makes or breaks every other property the book builds on.
Each step is a tick. State at the start of a tick is read; state at the end is written; nothing is half-updated mid-tick. Even an interactive program - a card game waiting for the next move, a text editor waiting for a keystroke - is a tick loop, just with an external trigger driving it. A program that does a single pass over a file and exits is a degenerate tick loop with one tick: it has the same start-of-tick / end-of-tick contract, just with N=1.
Ticks come in two natural shapes.
A time-driven tick fires at a fixed rate. The simulator from code/sim/SPEC.md runs at 30 Hz: one tick every 33 ms. The loop wakes up, advances every system by one step, sleeps until the next tick. Most simulations, games, control loops, audio engines, and animation systems are time-driven. The rate is a contract with the rest of the world: at this rate, output appears.
A turn-based tick fires when an event arrives. A card game ticks when a player makes a move. A chess engine ticks when its opponent moves. A discrete-event simulator ticks at the timestamp of the next pending event, however far in the future that is. The clock advances with the events, not under them. Turn-based ticks have no fixed rate; their pace is set by the input stream.
Both are ticks. The difference is what triggers the next pass:
#![allow(unused)]
fn main() {
// time-driven
use std::time::{Duration, Instant};
const TICK: Duration = Duration::from_millis(33);
loop {
let start = Instant::now();
run_all_systems(&mut world);
let elapsed = start.elapsed();
if elapsed < TICK {
std::thread::sleep(TICK - elapsed);
}
}
}#![allow(unused)]
fn main() {
// turn-based
loop {
let event = wait_for_next_event();
apply_event(&mut world, event);
}
}The §0 simulator runs time-driven. The card game from §5 ran turn-based - every card you dealt was one tick. Both are valid; both fit the same framework.
Within each tick, the systems run in an order specified by the system DAG (§14’s topic). Each tick has a budget: 33 ms at 30 Hz, the ms-per-move in a card game played at human speed. The budget binds the design: at 30 Hz with 1 000 000 creatures, each motion update has 33 nanoseconds, which only fits if the data layout cooperates (§4 made this precise).
When a tick runs long, the budget has a visible failure mode: the frame is dropped. The loop wakes late, the rate sags below its contract, and downstream something stutters. That visibility is worth instrumenting from the first day, because it is the cheapest operations tool you will ever have. Time each tick, and when it overruns the budget, raise in development so a regression stops the build, and warn and count in production so a degraded run is recorded rather than silent. The count of late ticks is the first number an operator reads when asked whether the thing is keeping up. The book returns to this in Part II as the front of the operations toolkit; here it is just a habit, that a tick which can blow its budget should be able to say so.
A subtle pitfall worth naming. Mixing turn-based and time-driven thinking in the same loop produces drift: the turn-based subsystem’s pace bleeds into the time-driven subsystem’s budget. The fix is to keep the two cleanly separated - typically, one outer loop and the other as an event source feeding it.
A tick is the unit of forward motion in any program that has forward motion. The next sections name what fits in one tick, in what order, and what does not.
Exercises
You will need a minimal Rust project for these. cargo new tick_lab is enough.
- A 30 Hz time-driven loop. Write a
mainthat loops at 30 Hz. Each iteration, print the elapsed time since program start. Sleep between ticks to maintain the rate. Run it for 10 seconds. Did you actually get 300 iterations? - The naive sleep mistake. Replace your sleep logic with
std::thread::sleep(Duration::from_millis(33))(no measurement). Run for 30 seconds. Does the program drift over time? Why? - Dropped frames. Inside the loop, sleep for 50 ms - longer than the budget. The loop is now running at 20 Hz; it has missed frames. Print a warning when this happens, and keep a running count of late ticks - that count is the first number an operator reads when asked whether the loop is keeping up.
- A turn-based loop. Write a tiny REPL: print
>, read a line, printyou said: <line>. Each line is one tick. Run it. Note that the loop has no fixed rate - its pace is your typing. - Mixing the two. Modify exercise 4 so that, while waiting for input, the program also prints the current second once per second. (Hint: spawn a thread, use a non-blocking read, or interleave with timeouts.) Note how mixing the two patterns adds complexity quickly.
- (stretch) A discrete-event tick loop. Maintain a
Vec<(f64, String)>of(timestamp, message)events. Pop the smallest-timestamp event, advance a “simulation clock” to that timestamp, print the message, repeat until the queue is empty. This is the structure of a discrete-event simulator and a preview of §12.
Reference notes in 11_the_tick_solutions.md.
What’s next
Exercise 6 hints at the next section. The clock can live on the events themselves, independent of how often the loop fires. §12 - Event time is separate from tick time names that separation.
Solutions: 11 - The tick
Exercise 1 - A 30 Hz time-driven loop
use std::time::{Duration, Instant};
const TICK: Duration = Duration::from_millis(33); // ~30 Hz
fn main() {
let program_start = Instant::now();
let mut tick = 0u64;
loop {
let tick_start = Instant::now();
println!("tick {tick} at {:?}", program_start.elapsed());
tick += 1;
if tick >= 300 { break; }
let elapsed = tick_start.elapsed();
if elapsed < TICK {
std::thread::sleep(TICK - elapsed);
}
}
}Expected: 300 iterations, total wall time ≈ 10 s. Sleeping the remainder of each tick keeps the rate stable; sleeping a fixed 33 ms regardless of work would let drift accumulate.
Exercise 2 - The naive sleep mistake
thread::sleep(Duration::from_millis(33)) sleeps 33 ms in addition to the work the loop did. If each iteration’s work takes 5 ms, the total period is 38 ms = 26 Hz, not 30 Hz. Over 30 seconds the program runs ~780 iterations instead of 900. The drift is the work-per-tick, multiplied by the number of ticks.
Exercise 3 - Dropped frames
Compare tick_start.elapsed() against TICK. If it exceeded TICK, the loop has missed a frame:
#![allow(unused)]
fn main() {
let work = tick_start.elapsed();
if work > TICK {
eprintln!("missed frame: work {work:?} > tick {TICK:?}");
} else {
std::thread::sleep(TICK - work);
}
}A 50 ms sleep blows the 33 ms budget by 17 ms - every tick logs a missed-frame warning. Real simulators count and surface this metric: it is the most direct sign you have left your real-time budget.
Exercise 4 - A turn-based loop
use std::io::{self, BufRead, Write};
fn main() {
let stdin = io::stdin();
let mut stdout = io::stdout();
loop {
write!(stdout, "> ").unwrap();
stdout.flush().unwrap();
let mut line = String::new();
if stdin.lock().read_line(&mut line).unwrap() == 0 { break; }
println!("you said: {}", line.trim());
}
}The loop’s pace is your typing speed, not the system clock. Each line is exactly one tick.
Exercises 5-6 - Sketches
Exercise 5. Two clean approaches: spawn a thread that prints once per second using mpsc::channel with a one-second timeout, or use mio/tokio for non-blocking stdin. Either works; both add code that has nothing to do with the original logic. The lesson is in the friction.
Exercise 6. Maintain events: Vec<(f64, String)> sorted by timestamp (or use a BinaryHeap). Pop the smallest, advance sim_time to that timestamp, print, repeat. Wall-clock time and sim_time decouple completely - the loop processes events as fast as it can; sim_time advances in jumps determined by the data.
12 - Event time is separate from tick time
Concept node: see the DAG and glossary entry 12.
Most beginners assume the loop’s frequency sets the model’s time resolution. If the loop runs at 30 Hz, surely the model can only resolve events at 1/30 s = 33 ms? This is wrong, and the confusion costs many simulations their precision.
The tick rate is how often the loop runs. It says nothing about what the loop does inside one tick. Inside one tick, the loop can process events at arbitrary timestamps - microsecond, picosecond, whatever the data carries. The clock lives on the events, not on the loop.
Concretely: a 30 Hz loop receiving 1 000 events per tick, each with microsecond-precision timestamps, processes them in timestamp order - applying each event’s effect with the precision the timestamp implies. Output to the rest of the world (rendering, logging, network) happens at 30 Hz, but the physics inside runs at microsecond resolution. The tick is a sampling rate; the events are the actual phenomena.
This is the model used by:
- Discrete-event simulators (queueing networks, traffic, supply chains): events fired at exact times.
- Game replay systems (rollback netcode, multiplayer): events arrive late but with their original timestamps.
- Trade execution engines: orders carry nanosecond timestamps; the loop processes them in order.
- Logic simulators in chip design: gate transitions at picosecond resolution; the simulator advances one transition at a time.
In each case, the tick rate of the host loop is irrelevant to the simulation’s resolution. The data carries the time.
This separation is what makes the simulator’s pending_event table possible. Each tick, the loop builds a list of events that should fire - collisions, eats, reproductions - each tagged with its predicted timestamp. The events fire in timestamp order regardless of which tick they were predicted in. A creature that “would have eaten 2 µs into the tick” has its eat applied at that exact moment, not at the start or end of the tick.
The pitfall is hard-coding the tick interval as the simulation’s clock granularity. Code that says
creature.energy -= 1.0 / 30.0; // "one tick worth of fuel"is conflating the two clocks. The right shape is
creature.energy -= elapsed_event_seconds * burn_rate;using the actual elapsed event-time, not the tick interval.
Event time and tick time are decoupled because they answer different questions. Event time answers when did this thing happen. Tick time answers when does the loop wake up. The same model can be sampled at any tick rate the application needs - visualisation at 30 Hz, recording at 60 Hz, fast-forward replay at 1 kHz - without changing what the model means.
Exercises
These extend the discrete-event loop from §11 exercise 6.
- A tiny event queue. Use
Vec<(f64, String)>andVec::sort_by. Push 10 events with random timestamps in[0, 10]seconds. Pop them in order; print each as[t=<sec>] <message>. Verify the output is timestamp-sorted. - The wrong way: tick-rate clock. Run a 30 Hz loop. In each tick, advance a counter by
1.0 / 30.0. Use this counter as your “simulation time”. Try to fire an event att = 0.005 s(5 ms). What happens? When does the event fire? - The right way: timestamp on events. Run the same 30 Hz loop, but each tick pop all events with timestamp ≤ current real time, applied in timestamp order. Fire an event at
t = 0.005 s. Show that the event applies at exactly that time, not at the next tick boundary. - Sampling at different rates. Run the same model under a 30 Hz loop, then a 60 Hz loop, then a 1 Hz loop. The events should fire at the same simulation times in all three runs (down to whatever precision the loop allows).
- Float and time. What’s the smallest time step
f32can represent for events att ≈ 1 hour? Att ≈ 1 day? Att ≈ 1 year? When do you needf64? (See §2.) - (stretch) A budget-aware loop. Modify your 30 Hz loop: at the start of each tick, pop events until either (a) the queue is empty or (b) you have used 25 ms of the 33 ms budget. Defer remaining events to the next tick. This is the soft-real-time pattern used in interactive simulators.
Reference notes in 12_event_time_vs_tick_time_solutions.md.
What’s next
§13 - A system is a function over tables introduces the building block of every tick: the system. Read-set in, write-set out, no hidden state, no surprises.
Solutions: 12 - Event time vs tick time
Exercise 1 - A tiny event queue
fn main() {
let mut state: u64 = 0xC0FFEE;
let rand = |s: &mut u64| { *s = s.wrapping_mul(6364136223846793005).wrapping_add(1442695040888963407); *s };
let mut events: Vec<(f64, String)> = Vec::new();
for i in 0..10 {
let t = (rand(&mut state) >> 32) as f64 / u32::MAX as f64 * 10.0;
events.push((t, format!("event #{i}")));
}
events.sort_by(|a, b| a.0.partial_cmp(&b.0).unwrap());
for (t, msg) in events {
println!("[t={t:.4}] {msg}");
}
}The events come out timestamp-sorted, even though they were generated in arbitrary order. The sort is the entire trick.
Exercise 2 - The wrong way
A 30 Hz counter advances by 1.0 / 30.0 ≈ 0.0333. Asking it to fire an event at t = 0.005 either fires the event at t = 0.0333 (the first tick boundary that crosses 0.005) or skips it entirely. Either way, the model has lost 28 ms of resolution.
Exercise 3 - The right way
Inside the 30 Hz loop:
#![allow(unused)]
fn main() {
let real_now = program_start.elapsed().as_secs_f64();
while events.first().is_some_and(|e| e.0 <= real_now) {
let (t, msg) = events.remove(0);
println!("[event t={t:.6}] {msg}"); // applies at t, not at real_now
}
}The event at t = 0.005 fires inside whichever tick has real_now >= 0.005 - the first one - and the printed t is 0.005, not the tick boundary. The simulation time is what the data says.
Exercise 4 - Sampling at different rates
Run the same event list through three loops at 30 Hz, 60 Hz, 1 Hz. The events fire at the same t values in all three runs. Only the wall-clock time at which they fire differs. The model is invariant under tick rate.
Exercise 5 - Float and time
f32 has ~7 significant decimal digits. At t ≈ 1 hour = 3600 s, the smallest distinguishable step is roughly 3600 / 10^7 = 0.00036 s = 360 µs. At t ≈ 1 day = 86400 s, ~8.6 ms. At t ≈ 1 year ≈ 3.15 × 10^7 s, ~3.2 s - f32 cannot represent millisecond resolution at year-scale.
f64 has ~15-16 significant digits. At one year, the smallest step is microseconds. For any simulation longer than a few hours of real time at sub-millisecond resolution, use f64 for timestamps.
Exercise 6 - Budget-aware loop
#![allow(unused)]
fn main() {
let tick_start = Instant::now();
let budget = Duration::from_millis(25);
while events.first().is_some_and(|e| e.0 <= sim_now) {
if tick_start.elapsed() > budget { break; }
let (t, msg) = events.remove(0);
apply(msg);
}
}Events that did not fit are still in the queue; they fire in the next tick. The model degrades gracefully under load instead of stalling the loop.
13 - A system is a function over tables
Concept node: see the DAG and glossary entry 13.
A system is a function that reads from one or more tables and writes to one or more tables. It declares its inputs (the read-set) and its outputs (the write-set). It has no hidden state, no global side effects, no interaction with the outside world during a tick. The signature is the contract.
#![allow(unused)]
fn main() {
fn motion(px: &mut [f32], py: &mut [f32], vx: &[f32], vy: &[f32], dt: f32) {
for i in 0..px.len() {
px[i] += vx[i] * dt;
py[i] += vy[i] * dt;
}
}
}Read-set: vx, vy, dt. Write-set: px, py. That is the entire contract. This system can run any time the velocity columns and dt are available and nothing else is writing the position columns.
Every system takes one of three shapes.
An operation is 1→1: every input row produces exactly one output row. motion is an operation: each creature’s position is updated to its new position. Most update functions are operations.
A filter is 1→{0, 1}: every input row produces zero or one output rows. apply_starve (from code/sim/SPEC.md) is a filter: each creature with energy ≤ 0 produces an entry in to_remove; creatures with energy > 0 produce nothing.
An emission is 1→N: every input row produces zero or more output rows. apply_reproduce is an emission: a parent above the energy threshold produces two offspring (a 1→2 emission).
These three shapes are the same shapes a database query takes. SELECT * FROM t WHERE p is a filter, SELECT a + b FROM t is an operation, SELECT explode(arr) FROM t is an emission. A system is a database operation written in Rust against Vecs instead of SQL against tables.
The contract that the system has no hidden state is what makes systems compose. Two systems with disjoint write-sets can run in parallel without coordination (§31). Two systems whose read-set and write-set form a chain must run in order (§14). The contract is the basis for all of this.
Even observability is a system. A debug inspector is a system whose read-set is “all tables” and whose write-set is “nothing”. It runs alongside the others, gathers data for inspection, and produces no side effects on the world. In production it is absent, not gated by a flag - the binary simply does not contain it.
A few patterns to watch for. A function that reads a table, writes to it, and reads it again in the same call is not a system - it has implicit ordering inside the body. Either split it into two systems with explicit ordering, or buffer the writes until the function exits. A function that takes &mut World and mutates whatever it likes is not a system - it has no declared write-set, and you cannot reason about it from its signature.
A system declares its inputs, declares its outputs, and does no more. That is the shape that lets every other discipline in the book work.
Exercises
Use the deck from §5 or the §0 simulator skeleton; either provides enough tables.
- Identify the shape. Classify each as operation, filter, or emission:
- Squaring every entry in a
Vec<f32>. - Filtering even integers from a
Vec<u32>. - Splitting each string in
Vec<String>into words, returning all words. - Computing the sum of a
Vec<u32>.
- Squaring every entry in a
- Write motion as a system. With position columns
px, py: Vec<f32>and velocity columnsvx, vy: Vec<f32>, writefn motion(px: &mut [f32], py: &mut [f32], vx: &[f32], vy: &[f32], dt: f32). Apply it to 100 creatures with random initial positions and velocities. Print the position of one creature across 10 ticks. - Declare the contract. Add doc comments to
motionlisting its read-set and write-set explicitly. The signature plus the doc comment is the system’s contract. - Write a filter. With
energy: &[f32], writefn starving(energy: &[f32]) -> Vec<usize>returning the indices whereenergy[i] <= 0. This is the read-only first half ofapply_starve. - Write an emission. With
parent_energy: &[f32], thresholdthreshold: f32, writefn reproduce(parent_energy: &[f32], threshold: f32) -> Vec<(usize, f32)>returning, for each parent above threshold, two(parent_index, offspring_energy)entries. This is a 1→2 emission. - Observe non-systems. Find a function in your previous work (or any tutorial) that mutates global state, writes to stdout in its body, or takes
&mut World. Note what makes it not a system. - (stretch) A test as a system. Write
fn no_creature_moved_too_far(prev_px: &[f32], prev_py: &[f32], cur_px: &[f32], cur_py: &[f32]) -> Vec<usize>, returning indices where the move was implausibly large. The “test” is just an inspection system reading the world.
Reference notes in 13_system_as_function_solutions.md.
What’s next
§14 - Systems compose into a DAG takes the next step: when many systems run together, how do they fit?
Solutions: 13 - A system is a function over tables
Exercise 1 - Identify the shape
| operation | shape |
|---|---|
Squaring every entry in Vec<f32> | operation (1→1) |
Filtering even integers from Vec<u32> | filter (1→{0,1}) |
| Splitting each string into words | emission (1→N) |
Computing the sum of Vec<u32> | reduction - strictly speaking neither of the three; one row of output for the whole table. Also called aggregate in SQL. |
The aggregate case is real but rare in this book - most systems run row-by-row. When you do need an aggregate, treat it as a system whose output is a single-row table.
Exercise 2 - Motion as a system
#![allow(unused)]
fn main() {
/// motion: advance each creature's position by its velocity over `dt` seconds.
///
/// Read-set: vx, vy, dt
/// Write-set: px, py
fn motion(px: &mut [f32], py: &mut [f32], vx: &[f32], vy: &[f32], dt: f32) {
assert_eq!(px.len(), vx.len());
for i in 0..px.len() {
px[i] += vx[i] * dt;
py[i] += vy[i] * dt;
}
}
}The assert_eq! enforces alignment (§6). Without it, a mismatched-length call silently iterates over the shorter array.
Exercise 4 - Filter
#![allow(unused)]
fn main() {
fn starving(energy: &[f32]) -> Vec<usize> {
let mut out = Vec::new();
for i in 0..energy.len() {
if energy[i] <= 0.0 {
out.push(i);
}
}
out
}
}This is the read-only first half of apply_starve. The actual apply_starve would push these indices into to_remove. Splitting the query from the mutation lets you test the query in isolation.
Exercise 5 - Emission
#![allow(unused)]
fn main() {
fn reproduce(parent_energy: &[f32], threshold: f32) -> Vec<(usize, f32)> {
let mut out = Vec::new();
for i in 0..parent_energy.len() {
if parent_energy[i] >= threshold {
let half = parent_energy[i] / 2.0;
out.push((i, half));
out.push((i, half));
}
}
out
}
}For each parent above threshold, two output rows. A 1→2 emission. The pattern is clear: the output Vec has a variable length depending on how many parents qualified.
Exercises 3, 6, 7 - Sketches
Exercise 3. Doc comments listing read-set and write-set are the system’s contract in machine-readable form. A reader of the function knows exactly what can change.
Exercise 6. Anti-system patterns: fn update(world: &mut World) (no declared write-set), fn step() that touches a static mut (hidden state), fn motion(px: &mut [f32], py: &mut [f32], ...) with an eprintln! inside (side effect - reduces parallelism, harms determinism, makes testing harder).
Exercise 7. A “test” is a system whose write-set is empty (or a small report table). Read pos/vel, output a list of suspicious creatures. Same code path as a debug inspector.
14 - Systems compose into a DAG
Concept node: see the DAG and glossary entry 14.
A program with one system is uninteresting; a program with many systems must say what runs in what order. The order is given by data dependencies: a system that reads a table must run after every system that writes that table within the same tick. No ordering is fixed by intuition; everything is given by the read-sets and write-sets.
Draw the dependency graph. Each system is a node. For every system that reads table T and every system that writes T, draw an edge writer → reader. The result is a directed acyclic graph (the DAG). A topological sort gives a valid execution order: any sort that respects the edges is correct. The program executes one such sort.
The simulator’s tick from code/sim/SPEC.md:
flowchart TB
food_spawn --> motion
motion --> next_event
next_event --> apply_eat
next_event --> apply_reproduce
next_event --> apply_starve
apply_eat --> cleanup
apply_reproduce --> cleanup
apply_starve --> cleanup
cleanup --> inspect
food_spawn runs first because its output is food, which motion and next_event read. next_event produces pending_event, which the three appliers consume in parallel (their write-sets are disjoint). cleanup runs after all of them because its read-set includes their writes. inspect runs last because it reads everything and writes nothing.
This is the same shape as a query plan in a database. The query optimiser takes a SQL statement, builds a graph of relational operations (each one a system!), and topo-sorts them into an execution plan. A simulator is a query plan running every tick.
The reason the graph must be acyclic is that a cycle is a contradiction. Suppose system A writes table T, system B reads T and writes U, system A reads U. Now A both produces T (which B reads) and consumes U (which B writes). A and B cannot both run before each other in the same tick.
flowchart LR
A -->|"T (A writes, B reads)"| B
B -->|"U (B writes, A reads)"| A
A cycle in the system graph is a design bug; it must be broken - usually by buffering one system’s write so it is consumed next tick instead of this tick.
Designing system order is therefore the same problem as designing a database query plan. Each system is a stage; the DAG is the plan; the program executes the plan. Students who follow this thread end up writing their own minimal query engine without realising it.
The cost of getting the DAG wrong is concrete. A reader that runs before its writer reads stale data - yesterday’s snapshot of a table that was supposed to have been updated. A reader that runs after its consumer reads garbage - a half-written table mid-update. The DAG is the contract that prevents both.
A subtle benefit: once the DAG is explicit, parallelism becomes trivial. Any two systems on the same DAG level - neither one a transitive dependency of the other - can run on different threads. The schedule is implied by the graph. §31 picks this up.
Exercises
-
Draw the DAG. Take the eight simulator systems (motion, food_spawn, next_event, apply_eat, apply_reproduce, apply_starve, cleanup, inspect) and draw the dependency graph yourself, deriving the edges from each system’s read-set and write-set in
code/sim/SPEC.md. Compare with the diagram above. -
Spot the cycle. Suppose
apply_starvewrites tofood(returning fuel to the world when a creature dies). Nowapply_starvewritesfood, whichfood_spawnreads.food_spawnwritesfood, whichnext_eventreads.next_eventwritespending_event, whichapply_starvereads. Where’s the cycle? How would you break it? -
Topological sort by hand. Given:
- A writes X
- B reads X, writes Y
- C reads X, writes Z
- D reads Y and Z, writes W
Which systems can run in parallel? What’s a valid execution order? Are there multiple valid orders?
-
Compose two systems. Write
motion(operation, writespos) andnext_event(operation, writespending_event). Wire them into a tick that runsmotionthennext_event. Inspectpending_eventafter the tick. -
Add
cleanup. Add acleanupsystem that processesto_removeandto_insert(both initially emptyVecs). Wire it afternext_event. Confirm the DAG remains acyclic. -
(stretch) A query planner. Take five hand-written SQL queries (each one a system shape) and draw the relational-algebra plan for each. Compare with how
motion → next_event → apply_*decomposes the simulator. The shape is the same.
Reference notes in 14_systems_compose_into_a_dag_solutions.md.
What’s next
§15 - State changes between ticks is the rule that makes the DAG actually work: mutations buffer; the world transitions atomically.
Solutions: 14 - Systems compose into a DAG
Exercise 1 - Draw the DAG
Drawing it by hand from the read-sets and write-sets in code/sim/SPEC.md reproduces the diagram in the chapter. Forks (after next_event) and joins (before cleanup) are the structural fingerprints of parallel-friendly stages.
Exercise 2 - Spot the cycle
The proposed change creates:
apply_starvewritesfoodfood_spawnreadsfood, writesfoodnext_eventreadsfood, writespending_eventapply_starvereadspending_event
So apply_starve → food_spawn → next_event → apply_starve - a cycle.
Three ways to break it:
- Buffer the write.
apply_starvepushes tofood_to_drop(a side table); a separate next-tickfood_dropsystem applies it. - Reorder the policy. Move “food appears where creatures died” out of the inner loop entirely - make food spawn pre-emptive, decoupled from death events.
- Accept the latency. Allow
apply_starveto write to a next-tickfoodbuffer thatfood_spawnreads next tick. The food appears one tick late.
The first is the standard fix: introduce a side table, defer the cross-system write to the next tick.
Exercise 3 - Topological sort
A writes X
B reads X, writes Y
C reads X, writes Z
D reads Y and Z, writes W
Dependencies: A → B, A → C, B → D, C → D. B and C are at the same DAG level: they share a read of X but their write-sets (Y and Z) are disjoint, so they can run in parallel. Valid orders include A, B, C, D and A, C, B, D. Both are correct.
Exercise 4 - Compose two systems
#![allow(unused)]
fn main() {
fn tick(world: &mut World, dt: f32) {
motion(&mut world.creatures.px, &mut world.creatures.py,
&world.creatures.vx, &world.creatures.vy, dt);
next_event(&world.creatures.px, &world.creatures.py,
&world.food, &mut world.pending_event);
}
}The order is forced: motion writes pos, next_event reads pos. Reverse the order and next_event reads stale positions.
Exercise 5 - Add cleanup
#![allow(unused)]
fn main() {
fn tick(world: &mut World, dt: f32) {
motion(&mut world.creatures.px, &mut world.creatures.py,
&world.creatures.vx, &world.creatures.vy, dt);
next_event(&world.creatures.px, &world.creatures.py,
&world.food, &mut world.pending_event);
cleanup(world);
}
}cleanup reads to_remove and to_insert, writes creatures. Neither motion nor next_event touches those tables, so cleanup runs at the end with no DAG conflicts.
Exercise 6 - A query planner
A SQL plan for SELECT u.name FROM users u JOIN orders o ON u.id = o.user_id WHERE o.amount > 100 decomposes into:
scan(orders)(operation)filter(amount > 100)(filter)join(users, filtered_orders)(operation, two-input)project(name)(operation)
Each is a system with a read-set and a write-set. The plan is a DAG. The simulator’s tick is the same shape with the systems in code/sim/SPEC.md substituting for relational operators. A compiled SQL plan and a simulator tick are isomorphic structures running at different cadences.
15 - State changes between ticks
Concept node: see the DAG and glossary entry 15.
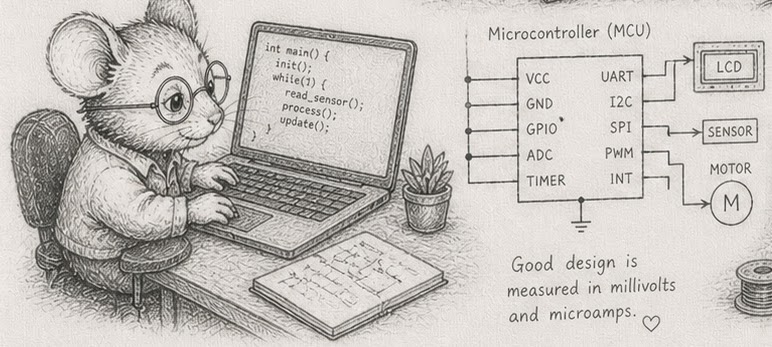
Inside a tick, the population is frozen: no creature is born or dies mid-tick. Structural changes - insertions and removals - are queued, not applied, and committed in one atomic sweep at the tick boundary. Value updates are different: they flow along the DAG in tick order, each system reading its inputs as the upstream writers left them, never half-written.
This is the rule that makes the DAG from §14 actually work. The danger is a system reading another’s half-finished work: if next_event began reading pos while motion were still writing it, half the creatures would have moved and half would not, and what next_event reads would no longer be well-defined. Two rules remove the danger. Order: a system runs only after the systems it reads from have completed, so it sees their finished output, never a partial write. Frozen membership: no system adds or removes a row mid-tick, so the set of creatures every system iterates is identical. Together they make the tick a clean function world_t+1 = step(world_t, inputs_t) - values move forward along the DAG, the population holds still, and cleanup commits the queued births and deaths only at the boundary.
Concretely: apply_starve does not call creatures.swap_remove(slot). It calls to_remove.push(creature_id). The creatures table is unchanged for the rest of the tick. After every system has run, cleanup consumes to_remove and to_insert together, applying every queued change in one sweep. Now the next tick begins with a consistent new world state.
This pattern is called double buffering: there is the committed world the systems read this tick, and the buffer of queued changes (to_remove, to_insert) that cleanup commits to produce the world the next tick reads. The pattern shows up everywhere - graphics frame buffers, database transactions, event-sourced systems. The rule is always the same: structural writes accumulate, then commit.
Two costs to absorb. First, every queued birth or death is one extra row pushed to a to_remove or to_insert table. Second, the cleanup pass is now its own system in the DAG. The benefit dwarfs the costs: every other system in the book composes cleanly, and parallelism becomes easy. With in-tick mutation, every parallel scheduling decision becomes a race condition. With buffered mutation, races are structurally impossible - disjoint write-sets are disjoint by construction.
A subtle case is insertions. A creature born during a tick (via apply_reproduce) does not appear in any system’s read-set during that tick - it is in to_insert, not in creatures. The newborn lives its first life on the next tick. This is the right behaviour for almost every simulation: it gives every creature an equal first tick of life. The alternative - applying inserts mid-tick - is a closed-loop bug factory.
Within one system, the writes can be in-tick: a system that updates pos for every creature in a loop applies each write immediately, because the rest of the system is the only reader and the only writer. The buffering rule is between systems, not between iterations within one system. Inside a system, the writes are sequential; between systems, the writes are batched.
The shape that emerges is: read everything into local arrays at system entry; do work; write outputs to buffers at system exit; commit at tick boundary. It is the same shape as the audio engine’s frame buffer, the database’s transaction commit, and the version-controlled file system’s commit-and-merge. They all solve the same problem: how do you read consistent state while the world is changing?
Exercises
These build on the simulator skeleton. Your to_remove: Vec<u32> and to_insert: Vec<CreatureRow> should already exist.
- The bug. Write a function that iterates
creaturesand callscreatures.swap_remove(i)wheneverenergy[i] <= 0.0. Run it on a 100-creature world where 30 are starving. What goes wrong? (Hint: skipped iterations, half the starvers survive.) - The fix. Rewrite the function to push the index into
to_removeinstead. After the loop completes, apply all removals in one pass. Verify all 30 starvers die. - The cleanup pass. Write
fn cleanup(world: &mut World, to_remove: &mut Vec<u32>, to_insert: &mut Vec<CreatureRow>). Apply removals first (usingswap_remove), then insertions. Why this order, and not the other? - Show two ticks. Run the loop for two ticks. After tick 1, log the population. After tick 2, log it again. Confirm that creatures killed in tick 1’s
apply_starvedo not appear in tick 2’s input. - Insertions are tick-delayed. A creature reproduces in tick 5: parent in
creatures, two offspring into_insert. After cleanup, the offspring are increatures. In tick 6 the offspring receive their first system pass. Confirm by adding anage_in_tickscolumn and watching offspring start at 0 in tick 6, not in tick 5. - (stretch) A bad design that almost works. Try to apply mutations in-tick carefully - collect dead creatures first, then process them in reverse-index order. Show one specific case where this still corrupts state. (Hint: a reproduction produces an offspring whose new index conflicts with an in-progress death.)
Reference notes in 15_state_changes_between_ticks_solutions.md.
What’s next
§16 - Determinism by order is the property the buffering rule guarantees: same inputs, same system order, same outputs. Reproducibility is structural.
Solutions: 15 - State changes between ticks
Exercise 1 - The bug
// BUG: do not do this.
let mut i = 0;
while i < creatures.len() {
if energy[i] <= 0.0 {
creatures.swap_remove(i);
energy.swap_remove(i);
// Do NOT advance i - the swap put a fresh creature here.
} else {
i += 1;
}
}This almost works - but the fix else { i += 1 } is fragile. Forget it once and you end up incrementing past the swapped-in creature, skipping the check. Worse, if apply_starve is one of three systems that both read and write creatures mid-tick, the indexes other systems hold become stale silently.
Exercise 2 - The fix
#![allow(unused)]
fn main() {
fn apply_starve(energy: &[f32], to_remove: &mut Vec<u32>, ids: &[u32]) {
for i in 0..energy.len() {
if energy[i] <= 0.0 {
to_remove.push(ids[i]);
}
}
}
}The function only reads. Mutation lives in cleanup, which runs once after every system has had its say. All 30 starvers die - no accidental skips, no mid-loop index hazards.
Exercise 3 - The cleanup pass
#![allow(unused)]
fn main() {
fn cleanup(world: &mut World, to_remove: &mut Vec<u32>, to_insert: &mut Vec<CreatureRow>) {
// Removals first
for id in to_remove.drain(..) {
let slot = world.id_to_slot[id as usize];
for col in world.columns_mut() {
col.swap_remove(slot);
}
world.id_to_slot[id as usize] = u32::MAX; // mark dead
}
// Insertions second
for row in to_insert.drain(..) {
let slot = world.append_creature(row);
world.id_to_slot[row.id as usize] = slot as u32;
}
}
}Removals first because they free slots that an insertion might reuse if you implemented slot recycling. If you insert before removing, you grow the table needlessly only to immediately shrink it.
Exercise 4 - Two ticks
After tick 1, log creatures.len(). The 30 dead creatures are still in creatures during the systems of tick 1 (each system saw them) but cleanup removed them at tick 1’s boundary. Tick 2’s input has 70 creatures. A creature killed in tick 1 is gone for tick 2.
Exercise 5 - Insertions are tick-delayed
Add an age_in_ticks: Vec<u32> column. Initialise to 0. Increment every creature in a system at the end of each tick. An offspring inserted in tick 5 is in to_insert during tick 5 → moved to creatures by cleanup at the end of tick 5 → first visible to systems in tick 6. Its age_in_ticks starts at 0 and reaches 1 after tick 6’s increment. The newborn never receives tick 5’s update.
Exercise 6 - A bad design
Tick start: creatures = [A, B, C, D].
A starves: collected.
B reproduces, producing X.
C is fine.
D starves: collected.
In-tick application, reverse-index order:
swap_remove D from slot 3 → creatures = [A, B, C]
swap_remove A from slot 0 → creatures = [C, B] (C was at slot 2, gets swapped in)
append X → creatures = [C, B, X]
But X's ID was supposed to map to its slot for everyone holding a reference;
some other system collected before our `apply_starve` was holding `id(X) → ?`
because X did not exist yet. Now X exists at slot 2. The reference is stale or invalid.
The principled fix is the rule: between systems, no mutations. Defer to cleanup. The reverse-index trick fixes one specific bug while opening the door to many.
16 - Determinism by order
Concept node: see the DAG and glossary entry 16.
A program is deterministic if the same inputs and the same execution produce the same outputs, every time. Sounds obvious. It is not - most modern programs are not deterministic by default. Threads run in OS-scheduled order. Hash maps may iterate in randomised order. The system clock differs by run. rand::thread_rng() differs by process.
In an ECS architecture, determinism is structural. Same world state at tick start + same system order + same inputs (events, RNG seed) = same world state at tick end. Bit-identical. Every time.
This is not a quality goal; it is a precondition for almost everything the book builds on:
- Replay. The world is the log decoded (§37). Replay reconstructs world state by re-running the inputs through the same system sequence. Without determinism, replay is impossible.
- Testing. A property test fixes an RNG seed and asserts the simulator behaves identically across runs. Without determinism, every test is flaky.
- Distributed simulation. Multiple machines run identical copies of the world. Without determinism, they drift apart by tick 1.
- Debugging. A bug at tick 4783 should appear at tick 4783 every run. Without determinism, debugging real-time bugs becomes guesswork.
The recipe for determinism is simple: forbid every source of non-determinism in the inner systems.
- No
HashMapin iteration order. UseVecorBTreeMap, which iterate in deterministic order. - No system clock. Get time from input events, not from
Instant::now(). Time is a value passed into the system, not read from the OS. - One RNG, seeded. A single
Rngwith a fixed seed, used in a defined order. Each system that needs randomness reads from it in DAG order. - No threads inside a system. A system runs single-threaded internally. Parallelism happens between systems with disjoint write-sets (§31), not inside one system.
- Buffered mutations. §15’s rule: mutations apply at tick boundaries, not mid-tick.
These rules are restrictive. They are also the price of every benefit listed above. Most modern programs decline to pay this price and accept the costs - flaky tests, unreproducible bugs, divergent distributed simulation. The book pays the price.
The cost of determinism is not absolute. Within a system, the implementation is free to use whatever it likes - SIMD intrinsics, branch hints, compile-time tricks - as long as the inputs and outputs are bit-identical to what the abstract specification demands. The discipline is at the system boundary: between systems, everything must be reproducible.
|
|
Note - Parallel reductions are the exception. “Bit-identical” is easy to lose the moment a reduction runs in parallel. Floating-point addition is not associative: |
A test for determinism is concrete. Run the simulator twice with the same seed, the same input event log, the same system order. After 1 000 ticks, hash the entire world state. If the hashes match, you are deterministic. If they do not, find the system whose output first differs, and trace the source of variability. Often: a HashMap, a system clock, a thread.
A simulator that is deterministic is also a simulator that can be tested. Once that property holds, every other quality goal - performance, parallelism, distribution - becomes safe to optimise toward. Without determinism, every optimisation is a coin flip.
The full payoff of determinism arrives at the save and load phase named in §11. The simulator can be paused, its tables serialised to disk, reloaded later, and resumed - and the result must be indistinguishable from a run that never paused. The mechanics arrive in §36 - Persistence is table serialization: a snapshot is the world’s tables written as a stream of (entity, key, value) triples - the same shape they have in memory. Combined with the input event log, replay is structural - read the snapshot, replay events through the same DAG with the same seed, you reconstruct the world at any later tick exactly. Determinism (this section), serialization (§36), and log-as-world (§37) are the three legs of replay.
Exercises
- Hash the world. Write a function that takes the simulator state and produces a
u64hash by feeding every column throughstd::hash::Hasher. Use this to compare world states across runs. - Two identical runs. Run the simulator twice with the same RNG seed. Hash the world at tick 100. Are they equal?
- Introduce non-determinism deliberately. Replace your seeded RNG with
rand::thread_rng()(or wallclock-seeded). Run twice. Show the hashes differ. - Find the culprit. Suppose your hashes differ. Hash the world after each system in the DAG. Identify which system’s output first differs, and what source of non-determinism it pulls from.
HashMapin iteration order. Build aHashMap<u32, f32>of 10 entries and iterate it twice within one program. Print the order each time. Are they the same? Try withBTreeMap. Try across two runs of the same program.- Time as input. Refactor a system that uses
Instant::now()to instead takecurrent_time: f64as a parameter. The system is now deterministic; the source ofcurrent_timeis the only place non-determinism can enter. - (stretch) A property test. Hand-roll a simple property test: generate 100 random seeds. For each, run the simulator for 100 ticks. Hash the resulting world. Verify that the same seed always produces the same hash, and that different seeds usually produce different hashes.
Reference notes in 16_determinism_by_order_solutions.md.
What’s next
You have closed Time & passes. The next phase is Existence-based processing, starting with §17 - Presence replaces flags. The simulator’s hunger and starvation systems are about to lose their booleans.
Solutions: 16 - Determinism by order
Exercise 1 - Hash the world
#![allow(unused)]
fn main() {
use std::hash::{Hash, Hasher};
use std::collections::hash_map::DefaultHasher;
fn hash_world(world: &World) -> u64 {
let mut h = DefaultHasher::new();
let c = &world.creatures;
c.len().hash(&mut h);
for &x in &c.px { x.to_bits().hash(&mut h); }
for &y in &c.py { y.to_bits().hash(&mut h); }
for &vx in &c.vx { vx.to_bits().hash(&mut h); }
for &vy in &c.vy { vy.to_bits().hash(&mut h); }
for &e in &c.energy { e.to_bits().hash(&mut h); }
h.finish()
}
}Floats are hashed via to_bits() because f32::hash is not trait-implemented (a float can be NaN with multiple bit patterns; the language refuses to choose). to_bits() is bit-equality, which is what determinism requires.
Exercise 2 - Two identical runs
#![allow(unused)]
fn main() {
let mut world1 = init_world(seed: 0xCAFE);
let mut world2 = init_world(seed: 0xCAFE);
for _ in 0..100 { tick(&mut world1); }
for _ in 0..100 { tick(&mut world2); }
assert_eq!(hash_world(&world1), hash_world(&world2)); // bit-identical
}If the hashes match, your simulator is deterministic for this run length and seed. (Not a proof - just one data point - but a strong one.)
Exercise 3 - Deliberate non-determinism
Replace seeded_rng with thread_rng() or a wall-clock-seeded RNG. Re-run. The hashes differ. The visible state of the world after 100 ticks is structurally the same shape but populated with different numbers.
Exercise 4 - Find the culprit
Hash the world after every system. The first system whose post-hash differs between runs is the culprit. A few common sources:
- A system reads from a
HashMapwhose iteration order is randomised. - A system reads
Instant::now()orSystemTime::now(). - A system spawns a thread; the thread’s writes race with the main thread’s.
Once located, the source is usually obvious. The fix is to remove the source - a deterministic alternative always exists.
Exercise 5 - HashMap iteration order
std::collections::HashMap uses RandomState by default - its iteration order varies between processes (and sometimes within one process across rebuilds, depending on the Rust version). BTreeMap iterates in sorted-key order, deterministic across runs. For ECS use, prefer Vec<(K, V)> (sequential, deterministic, cache-friendly) over either.
Exercise 6 - Time as input
#![allow(unused)]
fn main() {
// Before
fn motion(px: &mut [f32], py: &mut [f32], vx: &[f32], vy: &[f32]) {
let dt = some_global_clock(); // non-deterministic
/* ... */
}
// After
fn motion(px: &mut [f32], py: &mut [f32], vx: &[f32], vy: &[f32], dt: f32) {
/* ... */
}
}dt enters from the caller. The caller may compute it from Instant::now() (production) or read it from a recorded log (replay). The system itself does not know the difference.
Exercise 7 - A property test
#![allow(unused)]
fn main() {
fn property(seed: u64) -> bool {
let h1 = run_and_hash(seed);
let h2 = run_and_hash(seed);
h1 == h2
}
fn run_and_hash(seed: u64) -> u64 {
let mut world = init_world(seed);
for _ in 0..100 { tick(&mut world); }
hash_world(&world)
}
for seed in 0..100u64 {
assert!(property(seed), "non-deterministic at seed {seed}");
}
}If any seed produces different hashes across runs, the simulator is non-deterministic. Different seeds usually (not always - the hash space has collisions) produce different hashes; that confirms the simulator is sensitive to its inputs, which is the dual property to determinism.
17 - Presence replaces flags
Concept node: see the DAG and glossary entry 17.
A creature can be hungry. Two ways to model it.
The instinct most programmers arrive with is a boolean: is_hungry: bool on every creature, set to true when energy drops below a threshold, set to false when energy is restored. Every system that cares about hunger checks the flag: if creature.is_hungry { ... }. This is everywhere; it is the natural choice; it is what most programmers reach for.
The data-oriented alternative is membership. There is a hungry table - a Vec<u32> of the slots of hungry creatures, the rows they occupy in the columns. A creature is hungry if and only if its slot is in hungry. The flag does not exist as a field; it exists as a fact about which table the creature appears in. (Why the slot and not the stable id? Because a system that acts on the hungry wants to reach straight into the columns; the slot is that reach. §23 and §26 make the choice precise; for now, the table lists rows.)
The substitution looks small: a bool field becomes a row in another table. The implications are not.
Dispatch changes shape. The flag version is a per-creature filter inside every consuming system - walk all creatures, check the flag, do work if true. The membership version skips the filter - walk hungry, do work for every entry. At 1 000 000 creatures with 100 000 hungry, the flag version processes 1 000 000 rows; the membership version processes 100 000 - a 10× difference in work, and a 10× difference in memory bandwidth. §19 names this.
Storage changes shape. A flag column stores one byte per creature whether the flag is set or not. A creature with eight possible states needs eight bool fields = 8 bytes per creature; a million creatures store 8 MB of flags, most of which are false. A presence table stores only the entries that are set - if 10 % of creatures are hungry, the hungry table is 10 % the size of the flag column.
Persistence changes shape. Serialising a flag column writes the flag for every creature, including the ones where it is false. Serialising a presence table writes only the entries that exist. The latter is also closer to the natural shape of an event log (§37): a hungry_added event per entry, and that is the whole story.
Concurrency changes shape. Two flag fields on the same creature struct may share a cache line; concurrent writers to either field fight over it (§33 - false sharing). Two presence tables are physically separate Vecs; concurrent writers to disjoint tables never collide (§31).
The clean way to phrase the move comes from Richard Fabian’s Data-Oriented Design, in the chapter on Existence Based Processing. Instead of asking each room about its doors, ask the doors-table which doors are in this room. The query is reversed; the lookup is reversed; the work shrinks. Most programs spend their lives doing the wrong direction; the data-oriented mindset is to reverse it.
A production example: in a real ECS daemon, an admission decision is is_admitted(peer) = established_contacts.contains_key(peer). There is no is_admitted: bool on a peer; there is only the question “is this peer’s id in the table?”. O(1), no I/O, no enum.
Presence is not the only valid representation. A bool flag is sometimes right - when nearly every entity has the state set; when the predicate is computed cheaply on the fly; when the data is short-lived and persistence does not matter. But in this book, presence is the default; flags are a tradeoff to earn.
Exercises
These extend the §0 simulator skeleton.
- Add a
hungrytable. Addlet mut hungry: Vec<u32> = Vec::new();to your world (it holds slots). It is empty at start. - Populate it. Write a system
fn classify_hunger(energy: &[f32], hungry: &mut Vec<u32>). Walk creatures; ifenergy[i] < HUNGER_THRESHOLDand slotiis not already inhungry, pushi. (For now use linear scan to check membership; we will fix this in §23.) - Build the flag version. Add a parallel
is_hungry: Vec<bool>indexed by creature slot. Write the equivalent classification system that sets/clears the bool. - Time both at 1M creatures, 10% hungry. Build a 1 000 000-creature world with 10% energy starvation. Time
classify_hunger(presence) and the flag-setting version. Note the ratio of bytes touched: the flag version writes 1 MB, the presence version writes ~100 KB plus the cost of the membership check. - The membership query. Write
fn is_hungry_p(hungry: &[u32], slot: u32) -> bool(presence: scan the table) andfn is_hungry_f(is_hungry: &[bool], slot: usize) -> bool(flag). Time both at 1M creatures. Note: presence is O(N) scanned naively; the flag is O(1). §23 - Index maps is the fix that makes presence O(1) too, without a per-creature boolean - a sparse set. - The “how many are hungry” query. Write it both ways. Presence:
hungry.len(). Flag:is_hungry.iter().filter(|&&b| b).count(). Compare. The presence version is constant-time; the flag version walks all 1M. - (stretch) Persist both. Serialise both representations to a file. Note the disk size for 1M creatures with 10% hungry. The presence version stores ~100 KB; the flag version stores ~1 MB even though most flags are
false.
Reference notes in 17_presence_replaces_flags_solutions.md.
What’s next
§18 - Add/remove = insert/delete names what changes between the two representations: in the presence world, state transitions are structural moves between tables, not flag flips.
Solutions: 17 - Presence replaces flags
Exercise 2 - classify_hunger
#![allow(unused)]
fn main() {
const HUNGER_THRESHOLD: f32 = 5.0;
fn classify_hunger(energy: &[f32], hungry: &mut Vec<u32>) {
for i in 0..energy.len() {
let slot = i as u32;
let is_now = energy[i] < HUNGER_THRESHOLD;
let was_in = hungry.iter().any(|&s| s == slot);
if is_now && !was_in {
hungry.push(slot);
} else if !is_now && was_in {
if let Some(pos) = hungry.iter().position(|&s| s == slot) {
hungry.swap_remove(pos);
}
}
}
}
}The loop index i is the slot, so hungry holds slots. The linear iter().any is O(N). At 100 000 hungry creatures × 1 000 000 creatures per tick, this is 10¹¹ comparisons - far too slow. §23 - Index maps replaces it with an O(1) lookup, a sparse set rather than a per-creature boolean. For now the linear version makes the conceptual point.
Exercise 4 - Bytes touched
The presence write touches at most 100 000 × 4 bytes ≈ 400 KB (each new slot is a u32). The flag write touches all 1 000 000 × 1 byte = 1 MB.
The presence read (the membership check) is more expensive without an index - every classification check costs O(hungry.len()), and the worst case is total O(N²). The flag read is O(1). §23 is the fix; until then, the chapter argues for presence on storage and persistence grounds, not on read-cost grounds.
Exercise 5 - Membership queries
#![allow(unused)]
fn main() {
fn is_hungry_p(hungry: &[u32], slot: u32) -> bool {
hungry.iter().any(|&s| s == slot)
}
fn is_hungry_f(is_hungry: &[bool], slot: usize) -> bool {
is_hungry[slot]
}
}is_hungry_p is O(N); is_hungry_f is O(1). The chapter ends here intentionally - until the index map arrives in §23, the presence cost is real for queries. The shape of the data, however, is what we are committing to. The cost gets fixed by adding more structure - a sparse set (§23) that restores O(1) without a per-creature flag - not by reverting to flags.
Exercise 6 - Counting
#![allow(unused)]
fn main() {
let n_hungry_p = hungry.len(); // O(1)
let n_hungry_f = is_hungry.iter() // O(N)
.filter(|&&b| b).count();
}Counting is the easiest case for presence: the table’s length is the answer. The flag version walks the full vector even though the answer is the same.
Exercise 7 - Persistence
A naive bincode-style serialisation:
- Presence:
hungry.len() * 4 + 8bytes (theVec<u32>plus a length prefix). At 10 % hungry: ~400 KB. - Flag:
is_hungry.len()bytes. At 1M creatures: ~1 MB.
Both can be compressed; both can be written incrementally. The key observation is that the presence representation reflects what is true: the file is small when the world is mostly at rest. The flag representation is the same size whether or not anything is hungry.
18 - Add/remove = insert/delete
Concept node: see the DAG and glossary entry 18.
In the flag world, a state transition is a write. To make a creature hungry, set is_hungry = true. To stop it being hungry, set is_hungry = false. The flag was always there; only its value changed.
In the presence world, a state transition is a move between tables. To make a creature hungry, insert a row into hungry. To stop it being hungry, remove the row. The state has no field to flip; it has only the question of which table the creature is currently a row of.
Code-wise, the difference is small:
// flag
fn become_hungry_flag(is_hungry: &mut [bool], i: usize) {
is_hungry[i] = true;
}
// presence
fn become_hungry_presence(hungry: &mut Vec<u32>, i: u32) {
hungry.push(i);
}
fn stop_being_hungry_presence(hungry: &mut Vec<u32>, i: u32) {
if let Some(pos) = hungry.iter().position(|&s| s == i) {
hungry.swap_remove(pos); // O(N) scan for now; §23's sparse set makes it O(1)
}
}Two consequences worth naming.
The transition is structural. When a creature crosses the hunger threshold, a row in hungry actually appears or disappears. There is no in-place mutation; the table grows by one or shrinks by one. This is why §22 (mutations buffer; cleanup is batched) exists - adds and removes during a tick must be queued, then applied at the boundary, so that the iteration in progress does not see half the change. The deferred-cleanup pattern is born in this section.
The vocabulary disappears. There is no set_hungry(true), no set_hungry(false), no is_hungry() accessor pair. There is become_hungry (insert) and stop_being_hungry (remove), and even those are usually inlined into the system that detects the transition. The data-oriented program does not have getters and setters; it has systems that move rows between tables.
A useful test: can you describe the transition without naming a bool? “This creature became hungry” - well, did anything change? Yes: the hungry table grew by one entry. “This creature stopped being hungry” - the table shrank by one entry. Every state change in the system has a structural counterpart, and the structural counterpart is the canonical description.
|
|
Note - “Hungry” generalises further than this chapter uses it. In an MMORPG, the presence table for “creatures the player needs to know about” is the ones inside the player’s render radius - and the radius itself can shrink dynamically when CPU is tight, trading visible-creature count against the tick-budget headroom from §4. The presence table is a query, not a metaphysical state; its entries change when the system asks a different question. “Alive,” “hungry,” “in-scope,” “subscribed,” “active-this-frame” - same shape, different question, same discipline of inserts and removes between tables. |
The same pattern handles richer transitions. Imagine a creature that can be hungry, sleepy, or dead. Three tables: hungry, sleepy, dead. A creature transitions by moving between them. Becoming sleepy while hungry adds a row to sleepy (it can be in both). Dying removes the creature from hungry and sleepy (cleanup affects all relevant presence tables) and adds to dead. The transition is a multi-table operation, but each table is still just a list of slots.
This shape - state changes as inserts and removes - is the precondition for everything else EBP gives you. The dispatch in §19 iterates over the table directly, so the table’s contents being the canonical state of the world is structurally necessary. There is no flag to consult; there is only what is in the table right now.
Exercises
- Hunger transitions. Use your
hungrytable from §17. Each tick: readenergy; for any creature that crossed below the threshold, push tohungry; for any that crossed back above, swap-remove. Run for 100 ticks with energy varying randomly; verifyhungryalways contains exactly the creatures whose current energy is below threshold. - No flag, no setter. Search your code for any boolean field on a creature. Replace it with a presence table. The setter and getter both disappear.
- A second presence state. Add a
sleepytable. A creature is sleepy if its energy is high enough that it does not need to eat right now. A creature can be in bothsleepyandhungry? No - by definition the conditions are mutually exclusive. (Or: design them so they are.) Verify the invariant by checking after each tick that no creature appears in both tables. - Death. Add a
deadtable. When a creature’s energy drops below zero, push todeadand remove fromhungry(and fromsleepyif present). The cleanup logic is now multi-table; introduce a smalltransition_to_dead(i)helper that handles all the affected presence tables. - The transition log. Add
events: Vec<(u64, u32, &'static str)>(tick number, creature id, event name). Every insert/remove emits a row. Note the field is the entity id, not the slot: the membership tables move by slot, but the log is a boundary artifact read back later (§37), when slot positions no longer apply, so it records identity. After 100 ticks, the events log is the canonical history - every state change recorded. - (stretch) Reconstruct from the log. Given only the events log and the initial
creaturestable, reconstruct the finalhungry,sleepy, anddeadtables. The reconstruction is a one-shot replay; if it produces the same tables as the live simulation, your transitions are correctly captured.
Reference notes in 18_add_remove_insert_delete_solutions.md.
What’s next
§19 - EBP dispatch names the dispatch shape that the table-membership representation makes free.
Solutions: 18 - Add/remove = insert/delete
Throughout, i is a slot and the membership tables hold slots; the event log records the stable entity id (id[i]), because the log is read back later (§37) when slots no longer apply.
Exercise 1 - Hunger transitions
#![allow(unused)]
fn main() {
fn classify_hunger(energy: &[f32], hungry: &mut Vec<u32>) {
let in_hungry: Vec<bool> = (0..energy.len())
.map(|i| hungry.contains(&(i as u32)))
.collect();
for i in 0..energy.len() {
let slot = i as u32;
let starving = energy[i] < HUNGER_THRESHOLD;
match (starving, in_hungry[i]) {
(true, false) => hungry.push(slot),
(false, true) => {
if let Some(p) = hungry.iter().position(|&s| s == slot) {
hungry.swap_remove(p);
}
}
_ => {} // no transition
}
}
}
}The contains precompute is O(N) per slot here, O(N²) overall; §23’s sparse set makes each membership test O(1). After each tick, a sanity check: hungry contains exactly the slots whose energy < HUNGER_THRESHOLD. Verifying this every tick is the kind of test §43 names as “tests are systems”.
Exercise 2 - No flag, no setter
The conversion is mechanical. Find every is_*: bool field on a creature struct, delete it, add a presence table for the corresponding state. Replace creature.is_hungry = true with hungry.push(slot) and creature.is_hungry = false with a swap_remove. The setter and getter pair disappear.
The diff usually shrinks the codebase. Most flag-based systems have boilerplate - assertion that the flag is in the correct state, log on flag change, setter that fires events - that becomes redundant once the transition is itself a structural move.
Exercise 3 - A second presence state
#![allow(unused)]
fn main() {
const SLEEPY_HIGH: f32 = 50.0;
fn classify_sleepy(energy: &[f32], sleepy: &mut Vec<u32>, hungry: &[u32]) {
for i in 0..energy.len() {
let slot = i as u32;
let is_now = energy[i] >= SLEEPY_HIGH;
let in_hungry = hungry.contains(&slot);
let in_sleepy = sleepy.contains(&slot);
match (is_now, in_sleepy, in_hungry) {
(true, false, false) => sleepy.push(slot),
(false, true, _) => {
if let Some(p) = sleepy.iter().position(|&s| s == slot) {
sleepy.swap_remove(p);
}
}
_ => {}
}
}
}
// Invariant check
fn invariant(hungry: &[u32], sleepy: &[u32]) {
for &s in hungry {
debug_assert!(!sleepy.contains(&s), "slot {} in both hungry and sleepy", s);
}
}
}Mutually exclusive states are enforced by whoever can transition into them. If only the classification system can add to either, and it reads energy and decides which table to add to, the invariant is maintained by construction.
Exercise 4 - Death
#![allow(unused)]
fn main() {
fn transition_to_dead(
i: u32,
hungry: &mut Vec<u32>,
sleepy: &mut Vec<u32>,
dead: &mut Vec<u32>,
) {
if let Some(p) = hungry.iter().position(|&s| s == i) { hungry.swap_remove(p); }
if let Some(p) = sleepy.iter().position(|&s| s == i) { sleepy.swap_remove(p); }
dead.push(i);
}
}The helper makes the multi-table cleanup explicit and centralised. Future systems that add new presence states only need to update this one helper to handle deaths correctly.
Exercise 5 - The transition log
The membership tables move by slot, but the event records the entity - read it from the id column at the slot:
#![allow(unused)]
fn main() {
events.push((tick, id[i], "became_hungry"));
// ... or
events.push((tick, id[i], "stopped_being_hungry"));
}After 100 ticks the log is a complete history. Logging the entity rather than the slot is what makes the log survive: by the time it is read back, swap_remove and sort (§21, §28) have moved slots around, but the entity id still names the same creature.
Exercise 6 - Reconstruct from the log
The log records entities, so replay rebuilds entity sets:
#![allow(unused)]
fn main() {
fn replay(events: &[(u64, u32, &str)]) -> (Vec<u32>, Vec<u32>, Vec<u32>) {
let mut hungry: Vec<u32> = Vec::new(); // entities, not slots
let mut sleepy: Vec<u32> = Vec::new();
let mut dead: Vec<u32> = Vec::new();
for (_t, entity, kind) in events {
match *kind {
"became_hungry" => hungry.push(*entity),
"stopped_being_hungry" => {
if let Some(p) = hungry.iter().position(|&e| e == *entity) {
hungry.swap_remove(p);
}
}
"became_sleepy" => sleepy.push(*entity),
// etc.
"died" => {
hungry.retain(|&e| e != *entity);
sleepy.retain(|&e| e != *entity);
dead.push(*entity);
}
_ => {}
}
}
(hungry, sleepy, dead)
}
}To compare with the live simulation, map each live slot through the id column to its entity (id[slot]) and compare the entity sets. They match if and only if every transition was logged. This is replay in miniature; the same shape generalises to the full simulator at §37.
19 - EBP dispatch
Concept node: see the DAG and glossary entry 19.
A system that needs to act on hungry creatures has two ways to find them.
Filtered iteration. Walk all creatures; for each, ask “is it hungry?”; do work if yes:
for slot in 0..creatures.len() {
if is_hungry[slot] {
drive_hunger_behaviour(slot);
}
}Existence-based dispatch. Walk the hungry table directly; do work for every entry:
for &i in hungry.iter() {
drive_hunger_behaviour(i);
}The two produce the same result. The two have very different costs.
The filtered version walks 1 000 000 rows when 100 000 are hungry - 900 000 of those iterations are wasted. Each wasted iteration loads a cache line, runs a branch, and does nothing. The branch is predictable on the way into a false flag (the predictor learns “mostly false”) and unpredictable at the boundaries (where flags change), so the cost is dominated by memory bandwidth: 1 MB of is_hungry flags loaded to do 100 000 units of work.
The EBP version walks 100 000 rows. Every iteration does work. There is no per-row branch; the dispatcher is the table. Memory traffic is proportional to active rows, not to population.
The cost difference scales with the sparsity of the state. If 90 % of creatures are hungry, the two approaches are similar (both touch most of the data). If 10 % are hungry, EBP does 10× less work; at 0.1 %, 1000× less. Most simulator states are sparse - a small fraction of creatures are eating at any given tick, a small fraction are reproducing, a small fraction are dying - so EBP’s advantage compounds everywhere.
One honest qualifier, since this book measures: that ratio is in work and memory traffic. In wall time a scattered subscription shows less of it - a tenth of the rows, but each entry a cache miss into the columns - so at 10 % active the measured speedup is nearer 1.5× than 10× until the subscription is compacted (§26) and the gather streams. The work win is immediate; the time win follows locality. At high sparsity (1 %) the gather is rare enough that even scattered it wins outright.
A useful intuition: it is the difference between a wandering shopper trying to remember what they need and a shopper with a list. The list version is shorter, faster, and correct by construction. You do not consult the list to ask “is this aisle on my list?” - you walk down the list and visit each aisle once.
The shape EBP produces in code is also a clue. A system that uses EBP looks like:
#![allow(unused)]
fn main() {
fn drive_hunger(hungry: &[u32], energy: &mut [f32], dt: f32) {
// `hungry` holds slots (column positions), not entity ids
for &i in hungry {
energy[i as usize] -= HUNGER_BURN_RATE * dt;
}
}
}Read-set: hungry. Write-set: energy (only the slots listed in hungry). The signature is the contract - exactly the contract from §13. EBP is not a separate idea; it is the natural shape that a system takes when its inputs are presence tables.
Because hungry holds slots, each entry indexes the columns directly - there is no id-to-slot lookup inside the loop. An entity-id list would not work here: it would need the §10 id-to-slot hop, and worse, it would read the wrong rows after any sort or swap_remove (§9). That directness is the whole point of keying the table by slot; §26 measures what it is worth (and why the table holds slots, not ids), once the lifecycle in §24 makes slots stable enough to store.
EBP also composes cleanly with parallelism. A million creatures with 100 000 hungry can be split across eight threads - each thread takes a 12 500-row slice of hungry and does its work. The threads never need to consult creatures that are not hungry; their loads do not interfere. §31 develops this.
The takeaway: EBP is the dispatch that falls out of §17’s presence-replaces-flags substitution. You do not need to choose to use EBP - once your state is in presence tables, every system naturally iterates them. The flag version does not even arise.
Exercises
- Compare the two. Implement both
drive_hunger_filtered(walks creatures, checks flag) anddrive_hunger_ebp(walkshungry). Run both on a 1M-creature world with 10 % hungry. Time both. Note the ratio. - Sparsity test. Repeat exercise 1 at three sparsity levels: 1 %, 10 %, 50 %, 90 % of creatures hungry. Plot the cost per tick. The filtered version should stay roughly constant in cost; the EBP version’s cost should be roughly proportional to the fraction.
- A multi-state system. A creature can be in any combination of
hungry,sleepy,dead. Write three EBP systems:drive_hunger,drive_sleep,drive_death. Each iterates only its own presence table. Compare with a single filtered loop that handles all three withif-else. - The branch you do not write. Compile both versions in release mode. Look at the assembly (
cargo rustc --release -- --emit asm). Confirm the EBP version has nocmp/jefor the per-row check, while the filtered version has one. Note that the filtered version’s branch is correctly predicted, but the cache line is still read. - EBP with
&[T]slices. Most exercises so far useVec<u32>for the presence table; in production, systems take&[u32]slices. Refactor yourdrive_hunger_ebpto takehungry: &[u32]. Confirm it still compiles cleanly with the rest of the system DAG. - (stretch) A naive EBP bug. A system that iterates
hungrywhile also callinghungry.pushon the table corrupts iteration. (You knew this from §9 and §22.) Construct a small case that demonstrates the bug. Then fix it via deferred cleanup.
Reference notes in 19_ebp_dispatch_solutions.md.
What’s next
§20 - Empty tables are free names the consequence at scale: cost is proportional to active rows, not to population.
Solutions: 19 - EBP dispatch
Exercise 1 - Compare the two
#![allow(unused)]
fn main() {
const HUNGER_BURN: f32 = 0.1;
fn drive_hunger_filtered(
is_hungry: &[bool], energy: &mut [f32], dt: f32,
) {
for i in 0..is_hungry.len() {
if is_hungry[i] {
energy[i] -= HUNGER_BURN * dt;
}
}
}
fn drive_hunger_ebp(
hungry: &[u32], energy: &mut [f32], dt: f32,
) {
for &i in hungry {
energy[i as usize] -= HUNGER_BURN * dt;
}
}
}At 1M creatures, scan-all-and-branch vs the slot-keyed subscription gather, on a modern desktop (ebp_partition; per-machine spread in code/README):
- At 10 % subscribed: filtered ~0.58 ms, EBP ~0.36 ms - about 1.6×. The subscription does a tenth of the work, but its slots are scattered through the column, so the gather misses cache and spends most of the bandwidth win on the misses.
- At 1 % subscribed: filtered ~0.52 ms, EBP ~0.04 ms - about 14×. Sparse enough that a scattered gather still beats scanning a million flags.
The headline “10× less work at 10 %” is real as work and memory traffic; it shows up in wall time only once the subscription is compacted so the gather streams (§26’s locality, several× there). Scattered, the 10 % win is modest; dense, it is the full order of magnitude. This is why EBP and the §26 compaction belong together.
Exercise 2 - Sparsity test
| fraction hungry | filtered (ms) | EBP scattered (ms) |
|---|---|---|
| 1 % | ~0.52 | ~0.04 |
| 10 % | ~0.58 | ~0.36 |
| 50 % | ~0.88 | ~0.86 |
| 100 % | ~1.03 | ~1.20 |
(Modern desktop; numbers vary by chip - see code/README. The shape is what matters.) Filtered rises gently with the active fraction: it reads all N flags every time but only writes the active ones. The scattered subscription rises faster and crosses filtered near full participation - at 100 % it is a scan with extra bookkeeping (the §26 anti-pattern). Two things pull the EBP curve down: high sparsity (the 1 % row), and compaction (§26), which turns the scattered gather sequential. The durable claim is the work ratio - touch the subset, not the population - and wall time follows once the gather is dense.
Exercise 3 - Multi-state systems
#![allow(unused)]
fn main() {
drive_hunger(&hungry, &mut energy, dt);
drive_sleep(&sleepy, &mut energy, dt);
drive_death(&dead, &mut energy, dt);
}Three EBP systems, each iterating its own table. Each is bandwidth-bound by the active count, not by the population. The single-filtered-loop alternative looks like:
#![allow(unused)]
fn main() {
for slot in 0..1_000_000 {
if is_hungry[slot] { /* hunger work */ }
else if is_sleepy[slot] { /* sleep work */ }
else if is_dead[slot] { /* dead work */ }
}
}- and walks 1M rows × 3 flag checks per row × cache-bandwidth cost. Three EBP systems combined are typically 5-20× cheaper than the single filtered version, depending on sparsity.
Exercise 4 - The branch you do not write
The filtered version’s inner loop generates roughly:
mov al, [is_hungry + slot]
test al, al
je .skip
; ... work ...
.skip:
The EBP version’s inner loop has no je for membership; the dispatch is the iteration. Freed from the branch, the loop is a straight gather over the slots listed in hungry - no per-row test, and no id-to-slot indirection to serialise it.
Exercise 5 - &[T] slices
#![allow(unused)]
fn main() {
fn drive_hunger(
hungry: &[u32], // <- slice of slots, not Vec
energy: &mut [f32],
dt: f32,
) { /* ... */ }
}The function takes the minimal data it needs. The caller passes &world.hungry and the autoderef does the rest. This is the usual shape for systems and integrates cleanly with the parallel scheduling described in §31.
Exercise 6 - The naive bug
#![allow(unused)]
fn main() {
// BUG: do not do this.
for &i in hungry.iter() {
if /* some condition */ {
hungry.push(/* a new slot */); // mutating while iterating
}
}
}Rust’s borrow checker actually catches this one - hungry.iter() holds a & reference; hungry.push needs &mut. The code does not compile. The lesson is that the data-oriented discipline (deferred cleanup, §22) is what Rust’s borrow checker enforces structurally. Push to a side table; apply at tick boundary.
20 - Empty tables are free
Concept node: see the DAG and glossary entry 20.
If a presence table is empty, the system that iterates it does nothing. No rows, no work. This is the consequence of §19 at the limit, and it is the property that lets the simulator scale gracefully under shifting state.
Concretely: a 1 000 000-creature simulation that has zero hungry creatures right now spends zero cycles in drive_hunger. The system is wired into the DAG, runs every tick, takes a &[u32] slice of hungry of length 0, iterates zero times, returns. The overhead is one function call and one slice creation - measured in nanoseconds, not milliseconds.
This is not “fast in the empty case as an optimisation”. It is “free in the empty case as a structural consequence”. The flag-based version runs through the entire creature table even when all flags are false, paying full memory bandwidth to discover that no work is needed. The EBP version is told there is no work by the simple fact of an empty table.
The effect compounds across many states. A simulation with twenty possible behaviours, each represented as a presence table, pays for the fraction of creatures actually exhibiting each behaviour. Most ticks, most tables are nearly empty. The total work is proportional to the sum of active rows across all tables, not to population × number of behaviours. For a sparsely active world this is one or two orders of magnitude cheaper than the equivalent flag-based design.
A subtle case worth naming: an empty system is not the same thing as a missing system. A drive_hunger system that iterates an empty hungry is still in the DAG, still scheduled, still part of the program’s contract. It is just doing zero rows of work this tick. Removing it from the DAG entirely would change the contract. EBP gives you cheap idle systems, not absent ones.
This property has implications for design.
Activity-based costs. A simulator’s per-tick cost is set by what is active, not by what exists. A million dormant creatures cost nothing to ignore. Only behaving creatures consume budget. Most simulators in production rely on this - game worlds with hundreds of thousands of NPCs but only a few in active play, training simulations with millions of agents but few in critical phases, control systems with thousands of sensors but few in alarmed state.
Structural sparsity. The world is encouraged to be in mostly-resting states. Designs that scatter activity across many small presence tables (lots of cheap idle systems) outperform designs that concentrate activity in a single big “active creatures” flag. The data-oriented mindset is to multiply states (hungry, sleepy, mating, fighting, …) rather than gate behaviour through one master switch.
Persistence is also activity-based. A snapshot of an empty hungry table is one row in the schema and zero rows of data. A snapshot of an is_hungry: Vec<bool> of length 1 000 000 is 1 MB regardless of how many flags are set. Backups, replication, and replay all benefit from the same property.
The flag-based mind sees idle objects as “still present, just inactive”. The data-oriented mind sees idle objects as not in the table. The difference is one of cost: the former pays for what exists; the latter pays for what is happening.
Exercises
- Time the empty case. With your simulator from §19, run a tick where
hungryis empty. Timedrive_hunger. It should be in the nanoseconds range - function call plus slice creation, no inner loop. - Time the same case in flag form. Run the flag version of
drive_hungeragainst a 1 000 000-creature world where allis_hungryarefalse. Time it. Should be milliseconds - full table walked. - The cost-per-active-creature plot. Run the EBP simulator with
hungry.len()ranging over 0, 100, 1 000, 10 000, 100 000, 1 000 000. Timedrive_hungerat each. Plot. The line is roughly linear, starting at near-zero. - Add four more states. Add
sleepy,mating,fighting,idleas presence tables, each with its own driver system. Run a tick where most tables are empty (most creatures are inidle, say). Confirm the per-tick cost is roughly the cost of theidledriver only. - Activity histogram. At each tick, log
(tick, table_name, len)for every presence table. After 1000 ticks, plotlenover time. The plot is the simulator’s activity profile; flat lines mean the world is at rest, bumps mean events are firing. - (stretch) Idle systems removed? Argue why removing an empty system from the DAG (rather than running it with zero work) is the wrong move. Hint: it changes the system DAG, breaks determinism if the table is non-empty next tick, and adds dynamic scheduling cost that exceeds the empty-loop overhead.
Reference notes in 20_empty_tables_are_free_solutions.md.
What’s next
You have closed Existence-based processing. The next phase is Memory & lifecycle, starting with §21 - swap_remove. The simulator is about to start making structural changes to its tables - births and deaths, in production volumes - and the lifecycle phase makes those cheap.
Solutions: 20 - Empty tables are free
Exercise 1 - Time the empty case
#![allow(unused)]
fn main() {
let hungry: Vec<u32> = Vec::new();
let id_to_slot: Vec<u32> = (0..1_000_000).collect();
let mut energy = vec![100.0f32; 1_000_000];
let start = Instant::now();
drive_hunger_ebp(&hungry, &id_to_slot, &mut energy, 0.033);
println!("{:?}", start.elapsed()); // typically 50-200 ns
}Function call overhead plus slice creation. The for loop never executes. The overhead is in the noise of the measurement.
Exercise 2 - Time the flag-only case
#![allow(unused)]
fn main() {
let is_hungry = vec![false; 1_000_000];
let mut energy = vec![100.0f32; 1_000_000];
let start = Instant::now();
drive_hunger_filtered(&is_hungry, &mut energy, 0.033);
println!("{:?}", start.elapsed()); // typically 1-2 ms
}A million slots are walked even though every flag is false. The branch is correctly predicted (if false every time), but the cache lines for is_hungry are still loaded - that is the bandwidth cost. ~1 MB of bytes moved through L3 to RAM and back.
The ratio between the two cases is roughly 10⁴-10⁵: the empty EBP case is tens of thousands of times faster than the all-false flag case.
Exercise 3 - Cost-per-active plot
| hungry.len() | EBP time |
|---|---|
| 0 | ~100 ns |
| 100 | ~500 ns |
| 1 000 | ~2 µs |
| 10 000 | ~20 µs |
| 100 000 | ~200 µs |
| 1 000 000 | ~3 ms |
(The 1M case is bandwidth-bound and may even cross to slower-than-filtered, since id_to_slot lookups become random reads at that scale.) The line is roughly linear with a fixed-cost intercept of ~100 ns; the slope is ~2 ns/active-row.
Exercise 4 - Multi-state, mostly idle
In a tick where most creatures are in idle and the other tables are empty:
drive_idle(idle.len() = 999 000)does the work.drive_hunger(hungry.len() = 0): ~100 ns.drive_sleep(sleepy.len() = 0): ~100 ns.drive_mating(mating.len() = 0): ~100 ns.drive_fighting(fighting.len() = 0): ~100 ns.
Total: roughly the cost of drive_idle plus 400 ns of overhead from four empty systems. The four idle systems contribute essentially nothing. A flag-based equivalent with five flag fields per creature would walk all five flags for every creature - five times the bandwidth, regardless of activity.
Exercise 5 - Activity histogram
After 1000 ticks:
tick hungry sleepy mating fighting idle
0 0 0 0 0 1000
1 14 0 0 0 986
2 27 3 0 0 970
...
50 98 48 12 3 839
51 95 44 11 2 848
...
Plotted, the lines are mostly flat with small bumps at events (a wave of births, a famine, a reproductive bloom). The plot is the simulator’s vital signs. Anomalies show up as sudden spikes; anomalies that do not show up here probably do not exist as state changes worth caring about.
Exercise 6 - Idle systems removed?
Removing an empty system from the DAG looks superficially like a win - saves the function-call overhead - but is wrong on three fronts:
- Dynamic scheduling cost. Adding/removing systems each tick requires the scheduler to reconsider the DAG. This is more expensive than running the empty system.
- Determinism break. A system that disappears in tick N and reappears in tick N+1 has a different DAG between the two ticks; replay must reproduce both DAGs exactly, adding state to the replay system that has nothing to do with the simulation.
- Tick-boundary atomicity. If the table fills during a tick (via
to_insert, applied at cleanup), the system that processes it must already be in the schedule for next tick. Removing it would lose the work.
The fixed cost of an empty EBP system - single-digit microseconds at most - is far cheaper than any of these. Idle systems stay; tables empty out and fill up; the schedule does not move.
21 - swap_remove
Concept node: see the DAG and glossary entry 21.
The presence-replaces-flags substitution from §17 raised a problem we deferred. When a creature stops being hungry, you remove its slot from hungry. When a creature dies, you remove its row from every column. Removing rows from a Vec is expensive - vec.remove(i) shifts every later row left by one, costing O(N).
For a 1 000 000-creature simulator with 1 000 deaths per tick, naive remove costs roughly 10⁹ moves per tick - a thousand times the budget of a 30 Hz simulation.
The fix is a built-in Rust method: vec.swap_remove(i).
#![allow(unused)]
fn main() {
let mut v = vec![10, 20, 30, 40, 50];
let removed = v.swap_remove(1);
assert_eq!(removed, 20);
assert_eq!(v, vec![10, 50, 30, 40]); // 50 was moved into slot 1
}The mechanism is small: read the last element, write it into the deleted slot, shrink the table by one. One read, one write, and a length decrement. O(1) regardless of N.
Cost. A 1 000 000-creature table with 1 000 swap_removes per tick costs ~6 000 memory writes (one per column, six columns) - about 50 nanoseconds. The naive remove would cost a thousand times more1.
Cost paid. Order is sacrificed. If your code depended on rows being in any particular order, swap_remove reorders them. Two specific consequences:
- Iteration corrupted. If you iterate the table and call swap_remove during iteration, the slot you just visited now holds a different row, but your loop counter has moved past it. Half the rows after a swap_remove get skipped or revisited inconsistently.
- Slot references break. The row that backfilled the hole used to live at the end; now it sits at slot
iunder an index nobody was told about. Every slot-keyed table from §17 -hungry,sleepy, the rest - now lists a slot that points at the wrong creature. This is the same bug as §9: rearrangement breaks slot-based references, and a slot-keyedhungryis nothing but slot-based references.
Both problems have fixes already named in the book. The iteration corruption is fixed by §22 - Mutations buffer: swap_remove never runs during iteration; it runs during cleanup at the tick boundary, when no system is iterating. The moved-slot problem is fixed in two steps by §23 - Index maps: the cleanup rewrites the moved slot wherever a slot-keyed table holds it (a reindex), and an id_to_slot map lets anything holding a stable id re-find the creature after the move. Then §24 asks the sharper question: if moving a slot is this much trouble, why move it at all? Mark the creature dead, recycle its slot later, and every reference stays standing. swap_remove on death is the honest first cut - the wrong way that earns the right one.
This whole phase - Memory & lifecycle - only matters for variable-quantity tables. Constant-quantity tables like the 52-card deck never grow or shrink, never need swap_remove, never need any of the machinery in this phase. The card game ran for ten chapters without it. The simulator from §1 onward needs all of it, because creatures are born and die every tick.
To reuse the card-game milestone framing: the constant vs variable distinction is what determines whether a programmer reaches into the lifecycle toolbox at all. Once you have a table whose row count varies at runtime, every tool in this phase becomes load-bearing.
Measurements
remove(0) shifts every later row; swap_remove(0) moves one. So the ratio is essentially the table length and grows with N - “a thousand times” is a floor, not a ceiling. Full output: code/README.md.
| # | measurement | Ryzen 9 (modern) | i7-3610QM (2012) | i3-5010U (2015) | Pi 4 |
|---|---|---|---|---|---|
| 1 | remove vs swap_remove, 1M Vec | ~20 000x | 95 091x | 83 603x | 201 546x |
Exercises
- Compare timings. Build a
Vec<u64>of length 1 000 000. Time 1 000 calls tovec.remove(0). Time the same withvec.swap_remove(0). The ratio is roughly N. - Mid-table delete. Build a
Vec<u64>of length 1 000 000. Time 1 000 calls tovec.remove(500_000). Time 1 000 calls tovec.swap_remove(500_000). The naive version is about half as expensive as the front delete; the swap version is unchanged. - The iteration hazard. Build a
Vec<u64>with values0..100. In a forward loop, iterate and callvec.swap_remove(i)whenevervec[i] % 2 == 0. Compare with the expected output (only odd values remaining). What did you actually get? - The fix in one shape: iterate backwards. Repeat exercise 3, but iterate
(0..v.len()).rev(). Does it work now? Why does it work? - The fix in another shape: deferred cleanup. Repeat exercise 3, but instead of calling swap_remove inside the loop, push the index to
to_remove. After the loop, drainto_remove(in reverse order) and apply swap_remove. This is the §22 pattern in miniature. - Aligned swap_remove. Build the simulator’s six creature columns. Write
fn delete_creature(world: &mut World, slot: usize)that callsswap_remove(slot)on every column in the same order. Verify all columns remain aligned after a sequence of deletes. - (stretch) The bandwidth cost. Compute the bytes moved by
vec.remove(0)on a 1 GBVec: roughly the whole 1 GB. Compute the same forvec.swap_remove(0): roughly one element. The ratio isN / 1.
Reference notes in 21_swap_remove_solutions.md.
What’s next
§22 - Mutations buffer; cleanup is batched is the rule that makes swap_remove safe to use: it never runs while any system is iterating.
Solutions: 21 - swap_remove
Exercise 1 - Compare timings
#![allow(unused)]
fn main() {
use std::time::Instant;
let mut v: Vec<u64> = (0..1_000_000).collect();
let t = Instant::now();
for _ in 0..1000 { v.remove(0); }
println!("remove(0): {:?}", t.elapsed());
let mut v: Vec<u64> = (0..1_000_000).collect();
let t = Instant::now();
for _ in 0..1000 { v.swap_remove(0); }
println!("swap_remove(0): {:?}", t.elapsed());
}Typical: remove(0) takes around 500 ms; swap_remove(0) takes around 5 µs. The ratio is roughly N / 1. swap_remove is essentially free; remove is essentially the cost of the table.
Exercise 2 - Mid-table delete
remove(500_000) shifts ~500 000 elements left by one - half the work of remove(0). swap_remove(500_000) is unchanged: one read, one write, one decrement. The asymmetry is the whole point.
Exercise 3 - The iteration hazard
// Form A: the range fixes its bound at the original length.
for i in 0..v.len() {
if v[i] % 2 == 0 { v.swap_remove(i); }
}
// Form B: the length is re-read every pass.
let mut i = 0;
while i < v.len() {
if v[i] % 2 == 0 { v.swap_remove(i); }
i += 1;
}Both are wrong, and they fail differently. swap_remove(i) moves the last element into the hole at i, so the element now sitting at i is never inspected - and the vector got shorter.
Form A builds the range 0..v.len() once, capturing the original length. As elements are removed v shrinks, but i keeps climbing toward the original length, so v[i] eventually indexes past the end and panics.
Form B re-reads v.len() each pass, so it never indexes out of bounds - but it advances i past the element that was just swapped into the hole, skipping it. No panic; a silently wrong Vec that is some mix, not “all odd values.”
One mistake, two failure modes: a crash or a quiet lie. Exercise 4 shows the discipline that avoids both.
Exercise 4 - Iterate backwards
#![allow(unused)]
fn main() {
let mut v: Vec<u64> = (0..100).collect();
for i in (0..v.len()).rev() {
if v[i] % 2 == 0 { v.swap_remove(i); }
}
}This works because swap_remove(i) moves an element from index len - 1 (which we have already visited) into index i. Future iterations only visit smaller indices, which are unaffected. The reverse-iteration trick is correct, but fragile: future maintainers may forget the invariant.
Exercise 5 - Deferred cleanup
#![allow(unused)]
fn main() {
let mut v: Vec<u64> = (0..100).collect();
let mut to_remove: Vec<usize> = Vec::new();
for i in 0..v.len() {
if v[i] % 2 == 0 { to_remove.push(i); }
}
for &i in to_remove.iter().rev() {
v.swap_remove(i);
}
}The collection and the mutation are separated. Iteration over v runs to completion before the first swap_remove. The reverse-order drain ensures the indices remain valid as the table shrinks. This is the §22 pattern in miniature.
Exercise 6 - Aligned swap_remove
#![allow(unused)]
fn main() {
fn delete_creature(world: &mut World, slot: usize) {
let c = &mut world.creatures;
c.px.swap_remove(slot);
c.py.swap_remove(slot);
c.vx.swap_remove(slot);
c.vy.swap_remove(slot);
c.energy.swap_remove(slot);
c.id.swap_remove(slot);
c.generation.swap_remove(slot);
c.birth_t.swap_remove(slot);
}
}All eight columns swap_remove the same slot. The row that was at the end is now at slot, with all eight fields aligned. The row that was at slot is gone. The id_to_slot map (§23) gets the same treatment.
Exercise 7 - The bandwidth cost
vec.remove(0) on a 1 GB Vec moves ~1 GB through L3+RAM. vec.swap_remove(0) moves ~16 bytes (one row’s worth). The ratio is N / 1. At 30 Hz, naive remove on a 1 GB table is impossible (~10 s per call); swap_remove is comfortably under a microsecond.
22 - Mutations buffer; cleanup is batched
Concept node: see the DAG and glossary entry 22.
This rule has been forward-referenced through ten chapters. Time to make it concrete.
Mutations during a tick do not apply immediately; they queue, and a single cleanup pass applies them all at the tick boundary. The shape is two side tables on the world, alongside the creature columns:
#![allow(unused)]
fn main() {
to_remove: Vec<u32>, // creature ids to delete
to_insert: Vec<CreatureRow>, // new creature rows to add
}During the tick, every system that wants to delete pushes to to_remove. Every system that wants to add pushes to to_insert. No system mutates the live tables.
At the end of the tick, one system runs:
#![allow(unused)]
fn main() {
fn cleanup(world: &mut World) {
// 1. Delete all queued removals via swap_remove.
for id in world.to_remove.drain(..) {
let slot = world.id_to_slot[id as usize] as usize;
for col in world.columns_mut() {
col.swap_remove(slot);
}
// (Update id_to_slot - covered in §23.)
}
// 2. Append all queued inserts.
for row in world.to_insert.drain(..) {
world.append(row);
}
}
}Two passes, both bulk operations. The world is in a fully consistent state at the end.
What this fixes.
The iteration-corruption problem from §21 goes away because swap_remove never runs while any system is iterating. By the time cleanup runs, every system has finished. There is no concurrent iteration to confuse.
The race-condition problem from concurrent mutation goes away. Two systems may both want to remove a creature; both push to to_remove; cleanup deduplicates (or is idempotent in the rare case of double-removal). Neither system needs to coordinate.
The composition problem from §14 goes away. Systems read consistent snapshots; they read the world as it was at tick start, not the world as some other system half-rewrote it.
What it costs.
Every mutation is one extra row pushed to a side table. For a simulator with 1 000 deaths and 500 reproductions per tick, that is 1 500 rows of bookkeeping - a few thousand bytes, completely negligible against the cost of running the systems themselves.
The cleanup pass is one additional system in the DAG. It is empty (no work) when no mutations are queued; it iterates to_remove and to_insert when there are. The system is wired in once and never removed.
What it does not fix.
Two systems may both push the same id to to_remove if they independently detect the same death condition. Cleanup either deduplicates (a small set check) or is robust to double-removal (a swap_remove on a slot whose id is no longer there is a no-op if you check). Most simulators dedupe via a small HashSet at cleanup time.
The order of removals vs insertions inside cleanup matters: deletions first, then insertions. If you insert first, an inserted row might land in a slot you are about to delete. Deleting first frees up slots that subsequent inserts can reuse - though slot recycling is its own decision (§24).
The pattern itself is universal. Database transactions buffer writes and commit at the boundary. Graphics pipelines render to a back buffer and swap. Version-controlled file systems collect changes and commit. They all solve the same problem: how do you let many independent operations modify shared state without stepping on each other? The answer is always the same - accumulate, then apply atomically.
Exercises
- Implement the side tables. Add
to_remove: Vec<u32>andto_insert: Vec<CreatureRow>to your simulator’s world struct. They are empty at the start of every tick. - Push from
apply_starve. Modify your starvation system to push toto_removeinstead of callingswap_remove. Verify the system no longer mutatescreatures. - Push from
apply_reproduce. Modify reproduction to push offspring rows toto_insert. Verify reproduction no longer mutatescreatures. - Implement cleanup. Write the cleanup system. Apply removals first, then insertions. Run a tick with both kinds of mutations; verify the world is consistent after.
- The dedup question. Two systems push id 42 to
to_remove. Run cleanup naively (no dedup). What happens? Now add a small dedup pass at cleanup. Does the result change? - Buffers keep their capacity.
to_remove.clear()andto_insert.drain(..)empty the side tables but retain their allocated capacity. Printto_remove.capacity()andto_insert.capacity()across 100 ticks of a busy run and confirm they settle to a steady size and stop reallocating. Why does reusing the buffers each tick, rather than allocating fresh ones, matter for the tick budget (§4)? - (stretch) A graphics pipeline analogy. A rendering pipeline draws to a “back buffer” while the “front buffer” is being displayed. At the boundary of one frame to the next, the buffers swap. Argue why this is the same pattern as
to_remove/to_insertpluscleanup.
Reference notes in 22_mutations_buffer_solutions.md.
What’s next
§23 - Index maps is the missing piece for swap_remove to be useful: a parallel data structure that tracks where every id currently lives.
Solutions: 22 - Mutations buffer; cleanup is batched
Exercises 1-3 - Wire up the side tables
#![allow(unused)]
fn main() {
struct World {
creatures: Creatures, // the column set: px, py, vx, vy, energy, id (§23)
to_remove: Vec<u32>,
to_insert: Vec<CreatureRow>,
id_to_slot: Vec<u32>,
// ...
}
}apply_starve becomes:
#![allow(unused)]
fn main() {
fn apply_starve(energy: &[f32], ids: &[u32], to_remove: &mut Vec<u32>) {
for i in 0..energy.len() {
if energy[i] <= 0.0 { to_remove.push(ids[i]); }
}
}
}apply_reproduce becomes:
#![allow(unused)]
fn main() {
fn apply_reproduce(
energy: &[f32], px: &[f32], py: &[f32],
to_insert: &mut Vec<CreatureRow>,
threshold: f32,
) {
for i in 0..energy.len() {
if energy[i] >= threshold {
let half = energy[i] / 2.0;
// Offspring inherit the parent's position; real ids are assigned at append (§23/§24).
to_insert.push(CreatureRow { id: NEW_ID, px: px[i], py: py[i], vx: 0.0, vy: 0.0, energy: half });
to_insert.push(CreatureRow { id: NEW_ID, px: px[i], py: py[i], vx: 0.0, vy: 0.0, energy: half });
}
}
}
}(In practice, new ids come from the slot allocator from §24.)
Exercise 4 - Implement cleanup
#![allow(unused)]
fn main() {
fn cleanup(world: &mut World) {
// Removals first: swap_remove every column in lockstep.
for id in world.to_remove.drain(..) {
let slot = world.id_to_slot[id as usize] as usize;
let cr = &mut world.creatures;
let moved_id = *cr.id.last().unwrap();
cr.px.swap_remove(slot); cr.py.swap_remove(slot);
cr.vx.swap_remove(slot); cr.vy.swap_remove(slot);
cr.energy.swap_remove(slot); cr.id.swap_remove(slot);
world.id_to_slot[moved_id as usize] = slot as u32;
world.id_to_slot[id as usize] = INVALID;
}
// Then insertions: scatter each new row into the columns.
for c in world.to_insert.drain(..) {
let slot = world.creatures.len() as u32;
let cr = &mut world.creatures;
cr.px.push(c.px); cr.py.push(c.py);
cr.vx.push(c.vx); cr.vy.push(c.vy);
cr.energy.push(c.energy);
cr.id.push(c.id);
world.id_to_slot[c.id as usize] = slot;
}
}
}Removals first because freed slots are not reused (yet - that’s §24’s recycling). If you insert first, you may insert into a slot you are about to delete from.
Exercise 5 - The dedup question
Without dedup, two systems pushing id 42 cause cleanup to call swap_remove twice on the same id. The first call removes the row. The second call attempts to look up id_to_slot[42], finds INVALID, and… what? Either it panics, or it silently no-ops. Most simulators choose silent no-op via an early-return:
#![allow(unused)]
fn main() {
let slot = world.id_to_slot[id as usize];
if slot == INVALID { continue; }
}With dedup (a HashSet<u32> collected before the cleanup loop), the second call is never made. Both approaches work; the no-op approach is cheaper for most simulators.
Exercise 6 - Buffers keep their capacity
#![allow(unused)]
fn main() {
for tick in 0..100 {
// ... systems push to to_remove / to_insert ...
cleanup(&mut world); // drain(..) empties the buffers but keeps their capacity
println!("{tick}: cap {} {}", world.to_remove.capacity(), world.to_insert.capacity());
}
}drain(..) empties a Vec without freeing its buffer, so after the first few busy ticks to_remove.capacity() and to_insert.capacity() settle at the high-water mark and stop growing. Reusing the buffers means cleanup does zero allocation in steady state; a fresh Vec per tick would pay an allocation, and a later free, every tick on the hot path for no benefit. This is the §4 budget again: the cheapest allocation is the one you already made.
Exercise 7 - Graphics pipeline analogy
A renderer draws into a “back buffer” while the GPU is displaying the “front buffer”. At vsync, the buffers swap (or the back buffer is presented). The display never sees a partially-drawn frame; the renderer never overwrites a frame mid-scan.
The simulator’s tick is the same: systems write into to_remove and to_insert (the back buffer); cleanup applies them to the live tables (the front buffer); the next tick reads consistent state. The shape - accumulate, commit at the boundary - is universal.
23 - Index maps
Concept node: see the DAG and glossary entry 23.
The slot-keyed tables from §17 and §19 left two questions open, and §21 added a third.
- Point membership. “Is slot
iinhungry?” costs O(N) when answered by scanning the table (hungry.iter().any(|&s| s == i)). - Unsubscribe. To
swap_removeslotiout ofhungryyou first need its position in the table - the same O(N) scan. - The moved slot. When swap_remove relocates a row (§21), every slot-keyed table that listed the old position now points at the wrong creature.
All three are solved by one idea: an index map - a parallel array from a key to a position, with a sentinel for “absent”. It appears twice in the simulator, the same shape pointing at two different things.
Instance one: id_to_slot. Maps a stable entity to its current column slot. This is what re-finds a creature after a move, and what anything outside the columns (a save, the network, the UI - §26) uses to turn an id back into a slot.
#![allow(unused)]
fn main() {
const INVALID: u32 = u32::MAX;
fn slot_of(id_to_slot: &[u32], entity: u32) -> Option<usize> {
let slot = id_to_slot[entity as usize];
if slot == INVALID { None } else { Some(slot as usize) }
}
}A sentinel (u32::MAX) marks “no slot - this entity has no current row”. The Option makes the missing case explicit.
Instance two: the sparse set. A membership table needs O(1) “is slot i present?” and O(1) unsubscribe, without a per-creature boolean - a boolean would be exactly the flag §17 abolished, one byte per creature whether set or not. The structure is two arrays: a dense: Vec<u32> of the present slots (what the hot loop walks), and a sparse: Vec<u32> indexed by slot, holding each present slot’s position in dense, or INVALID.
#![allow(unused)]
fn main() {
// is slot i present? sparse[i] != INVALID
// subscribe(i): sparse[i] = dense.len() as u32; dense.push(i);
// unsubscribe(i): let p = sparse[i] as usize;
// let moved = *dense.last().unwrap();
// dense.swap_remove(p);
// sparse[moved as usize] = p as u32;
// sparse[i] = INVALID;
}sparse stores positions and a sentinel, not booleans - it is the index-map pattern again, pointing into the membership table instead of into the columns. It answers “present?” and “where, so I can remove it in O(1)?”, which a boolean could not. This pair, a dense list plus a sparse index, is the sparse set - the membership structure every ECS ships.
Maintenance. Both maps must be kept current whenever a row moves. Take the move that hurts most, swap_remove (§21): the last row, at slot last, backfills the freed slot i.
id_to_slot. Setid_to_slot[moved_entity] = i; setid_to_slot[deleted_entity] = INVALID.- Every slot-keyed table. Wherever a
densearray listed slotlast, rewrite it toi- a reindex through the move. With the sparse set this is O(1): the moved creature’s position issparse[last], sodense[sparse[last]] = i, thensparse[i] = sparse[last]; sparse[last] = INVALID(when the moved creature was a member). - Append. A new row at slot
nsetsid_to_slot[new_entity] = n. - Sort or shuffle. Reordering for locality (§28) moves every slot; both maps are rewritten in lockstep with the new order.
The cleanup system from §22 is the natural home for all of this. Every move goes through cleanup; cleanup keeps the maps in step. This is also why §24 prefers not to move slots on death at all: every avoided move is a reindex never paid.
Cost. The map adds one u32 per id ever issued, including ids that are currently dead but whose slots have not been recycled. For a simulator that issues a million ids over its lifetime but has 100 000 alive at any moment, the map is 4 MB. That is a real cost - bigger than the alive table itself if the table has narrow columns. Mitigations include:
- Generational ids (§10) bound the map’s size to the maximum live + recycled count, not the total ever issued.
- A
HashMap<u32, u32>trades a constant-time lookup overhead for tighter memory; useful when ids are sparse. - A separate id allocator that recycles dead ids, so the map’s size matches the high-water mark of live ids.
For most simulators, the dense Vec<u32> is the right shape. It is one cache line per 16 ids; cleanup streams sequentially through it.
Each maintained membership table carries its own sparse array of the same magnitude (one u32 per slot). So the cost is paid once for id_to_slot and once more per slot-keyed table kept incrementally. A table you instead rebuild from scratch each tick needs no sparse index at all - only its dense list, cleared and refilled. Rebuild when the membership churns almost completely each tick; maintain incrementally when it is stable and only a few entries change per tick. It is the same cost-versus-churn judgment as everywhere else in the book.
The pattern in the wild. Every ECS engine ships an index map. Bevy’s Entity is a 64-bit handle whose unpacking is essentially a slot lookup with a generation check. slotmap’s SlotMap keeps an internal map. Database engines maintain index maps as B-trees over primary keys. The shape - id-to-slot lookup, maintained on every move - is universal.
Combined with §10’s stable ids and §24’s slot recycling, the index map is the third piece of the generational arena - the canonical handle-based data structure in modern systems software.
Exercises
- Build the map. Add
id_to_slot: Vec<u32>to your simulator. Initialise toINVALIDfor all ids. When a creature is appended at slot N, setid_to_slot[id] = N. - Build the sparse set. Give
hungryasparse: Vec<u32>alongside its dense list. Implementsubscribe(i),unsubscribe(i), andis_member(i)- each O(1), no boolean. Confirmis_memberalways agrees with a linear scan of the dense list across a run of subscribes and unsubscribes. - Maintain both maps on swap_remove. Modify your cleanup so that after
creatures.swap_remove(slot):id_to_slot[deleted_entity] = INVALID;id_to_slot[moved_entity] = slot(the last row, now atslot)- every slot-keyed table is reindexed: wherever it listed the moved row’s old slot, rewrite it to
slot. Verifyhungrystill lists exactly the hungry creatures after a sequence of deaths.
- Time the difference. At 1 M creatures, call
is_member(random_slot)100 000 times per tick. Compare the linear scan of the dense list (§17) with the sparse-set lookup (§23). The ratio is roughly N - about a million. - The bandwidth cost. At 1 M ids,
id_to_slotis 4 MB. Cleanup’s update of the map writes ~12 bytes per swap_remove (delete row’s slot, moved row’s slot, plus bookkeeping). Compute the cleanup cost in microseconds for 1 000 deletes per tick; compare to the budget at 30 Hz. - Compaction compatibility. When
creaturesare reordered for locality (the §28 compaction), every slot moves. Rewriteid_to_slotand every slot-keyed table in lockstep with the new order. Verify both id-held references and slot-keyed memberships are still correct after the sort. - (stretch) A from-scratch generational arena. Combine §10’s
generation: Vec<u32>, §22’s deferred cleanup, and §23’sid_to_slotmap into aSlotMap<T>struct. Compare the shape withslotmap::SlotMap- same machinery, organised differently.
Reference notes in 23_index_maps_solutions.md.
What’s next
§24 - Append-only and recycling names two strategies for what happens to a slot after it has been freed. The choice is decided by access pattern, not by taste.
Solutions: 23 - Index maps
Exercise 1 - Build the map
#![allow(unused)]
fn main() {
const INVALID: u32 = u32::MAX;
// The entity table: one column per field, aligned by slot.
struct Creatures {
px: Vec<f32>, py: Vec<f32>,
vx: Vec<f32>, vy: Vec<f32>,
energy: Vec<f32>,
id: Vec<u32>,
}
impl Creatures {
fn len(&self) -> usize { self.id.len() }
}
struct World {
creatures: Creatures,
id_to_slot: Vec<u32>, // length = high-water mark of ids ever issued
next_id: u32,
}
// `CreatureRow` is a transient value: the fields of one new creature,
// scattered into the columns by `append`, never stored.
fn append(world: &mut World, c: CreatureRow) -> u32 {
let id = world.next_id;
world.next_id += 1;
while world.id_to_slot.len() <= id as usize {
world.id_to_slot.push(INVALID);
}
let slot = world.creatures.len() as u32;
let cr = &mut world.creatures;
cr.px.push(c.px); cr.py.push(c.py);
cr.vx.push(c.vx); cr.vy.push(c.vy);
cr.energy.push(c.energy);
cr.id.push(id);
world.id_to_slot[id as usize] = slot;
id
}
}The map grows lazily as new ids are issued. INVALID marks dead/never-used slots.
Exercise 2 - Build the sparse set
The membership table is a sparse set: a dense list of the present slots (what the hot loop walks) plus a sparse index from slot to its position in dense, or INVALID. No per-creature boolean.
#![allow(unused)]
fn main() {
struct Subscription {
dense: Vec<u32>, // present slots
sparse: Vec<u32>, // slot -> position in dense, or INVALID
}
impl Subscription {
fn is_member(&self, i: u32) -> bool {
let p = self.sparse[i as usize];
p != INVALID && self.dense[p as usize] == i
}
fn subscribe(&mut self, i: u32) {
if self.is_member(i) { return; }
self.sparse[i as usize] = self.dense.len() as u32;
self.dense.push(i);
}
fn unsubscribe(&mut self, i: u32) {
let p = self.sparse[i as usize];
if p == INVALID { return; }
let moved = *self.dense.last().unwrap();
self.dense.swap_remove(p as usize);
self.sparse[moved as usize] = p;
self.sparse[i as usize] = INVALID;
}
}
}is_member is O(1) - two array reads - against the §17 linear scan’s hundreds of microseconds at 1 M. And unlike a Vec<bool> flag, the sparse index hands back the dense position, which is what makes unsubscribe O(1) too. It is the same index-map shape as id_to_slot, pointing into the membership table instead of into the columns.
Exercise 3 - Maintain on swap_remove
#![allow(unused)]
fn main() {
// reindex one slot-keyed table after a row moves from `old` to `new`.
fn reindex_move(sub: &mut Subscription, old: u32, new: u32) {
let p = sub.sparse[old as usize];
if p == INVALID { return; } // the moved creature was not a member
sub.dense[p as usize] = new;
sub.sparse[new as usize] = p;
sub.sparse[old as usize] = INVALID;
}
fn delete_by_id(world: &mut World, id: u32) {
// The dead creature was already unsubscribed from every table at death (§18).
let slot = world.id_to_slot[id as usize] as usize;
let cr = &mut world.creatures;
let moved_id = *cr.id.last().unwrap(); // the row swap_remove relocates into `slot`
cr.px.swap_remove(slot); cr.py.swap_remove(slot);
cr.vx.swap_remove(slot); cr.vy.swap_remove(slot);
cr.energy.swap_remove(slot); cr.id.swap_remove(slot);
let moved_old_slot = world.creatures.len() as u32; // length AFTER the removes
// id_to_slot: re-find the moved entity; retire the dead one.
world.id_to_slot[moved_id as usize] = slot as u32;
world.id_to_slot[id as usize] = INVALID;
// every slot-keyed table: the survivor moved from `moved_old_slot` to `slot`.
reindex_move(&mut world.hungry, moved_old_slot, slot as u32);
// ... and any other subscription the survivor might be in.
}
}Two repairs per move, both O(1): id_to_slot re-finds the entity that relocated, and reindex_move rewrites that creature’s slot wherever a subscription listed it. When the deleted row was already the last one, moved_old_slot == slot and reindex_move is a harmless no-op (the dead creature is no member). One swap_remove per column plus a handful of map writes - a few dozen bytes per delete, well under 10 ns at ~12 GB/s. This is the cost §24 avoids entirely by not moving slots on death.
Exercise 4 - Time the difference
At 1 M creatures, the linear-scan presence check costs ~1 ms. The indexed version costs ~50 ns. Run 100 000 queries per tick:
- Linear: 100 000 × 1 ms = 100 seconds. Impossible.
- Indexed: 100 000 × 50 ns = 5 ms. Fits 30 Hz with margin.
The factor of N (a million) shows up in real wall time.
Exercise 5 - Bandwidth cost of cleanup
1 000 deletes per tick × 12 bytes each = 12 KB written per tick. At ~12 GB/s memory bandwidth, that is ~1 µs. Compare to a 30 Hz budget of 33 ms: ~0.003 % of the tick. The cleanup pass is essentially free; the system can afford to run every tick without measurable cost.
Exercise 6 - Compaction compatibility
#![allow(unused)]
fn main() {
fn sort_creatures_for_locality(world: &mut World) {
let n = world.creatures.len();
let mut order: Vec<usize> = (0..n).collect();
let cr = &world.creatures;
order.sort_by_key(|&i| spatial_cell(cr.px[i], cr.py[i]));
// Gather every column into the new order, in lockstep.
let px = order.iter().map(|&i| cr.px[i]).collect();
let py = order.iter().map(|&i| cr.py[i]).collect();
let vx = order.iter().map(|&i| cr.vx[i]).collect();
let vy = order.iter().map(|&i| cr.vy[i]).collect();
let energy = order.iter().map(|&i| cr.energy[i]).collect();
let id: Vec<u32> = order.iter().map(|&i| cr.id[i]).collect();
world.creatures = Creatures { px, py, vx, vy, energy, id };
// Rewrite id_to_slot: every slot moved.
for (new_slot, &cid) in world.creatures.id.iter().enumerate() {
world.id_to_slot[cid as usize] = new_slot as u32;
}
// Reindex every slot-keyed table through the same permutation.
// order[new] = old, so invert it to map old slot -> new slot.
let mut new_pos = vec![0u32; n];
for (new, &old) in order.iter().enumerate() {
new_pos[old] = new as u32;
}
reindex_subscription(&mut world.hungry, &new_pos);
// ... and every other subscription.
}
fn reindex_subscription(sub: &mut Subscription, new_pos: &[u32]) {
for s in sub.dense.iter_mut() { *s = new_pos[*s as usize]; }
for p in sub.sparse.iter_mut() { *p = INVALID; }
for (pos, &slot) in sub.dense.iter().enumerate() {
sub.sparse[slot as usize] = pos as u32;
}
}
}Every slot moves, so both maps are rewritten: id_to_slot, so id-held references (a save, the network, the UI - §26) still resolve; and each subscription’s dense/sparse, so the slot-keyed memberships still point at the right creatures. Id references and slot references are each repaired by the sort, through their own map. Nothing holds a bare slot across the sort and expects it to survive - it survives only because cleanup rewrites it.
Exercise 7 - From-scratch generational arena
#![allow(unused)]
fn main() {
struct SlotMap<T> {
items: Vec<T>,
generation: Vec<u32>,
free: Vec<u32>,
}
impl<T: Clone + Default> SlotMap<T> {
fn insert(&mut self, t: T) -> (u32, u32) {
if let Some(slot) = self.free.pop() {
self.items[slot as usize] = t;
(slot, self.generation[slot as usize])
} else {
let slot = self.items.len() as u32;
self.items.push(t);
self.generation.push(0);
(slot, 0)
}
}
fn remove(&mut self, slot: u32) {
self.generation[slot as usize] += 1;
self.free.push(slot);
self.items[slot as usize] = Default::default(); // optional
}
fn get(&self, slot: u32, generation: u32) -> Option<&T> {
if self.generation[slot as usize] == generation { Some(&self.items[slot as usize]) } else { None }
}
}
}Compare with slotmap::SlotMap - the same machinery. The crate adds a packed key (slot + generation in one u64), an iterator API, and a null() sentinel. The shape is identical.
24 - Append-only and recycling
Concept node: see the DAG and glossary entry 24.
When a row is removed from a table, its slot is freed. There are two strategies for what happens to that slot.
Append-only. Old slots stay valid forever. The table grows monotonically. New rows always go to the end.
Recycling. Freed slots are reused. The table’s length stays bounded. New rows go into freed slots before the table grows.
Each is correct; they have very different access patterns and costs.
Append-only. Use when:
- History matters. The simulator’s
eaten,born,deadlogs fromcode/sim/SPEC.mdare all append-only - they record what happened. Removed entries would be lost history. - Old references must remain valid forever. Some pointer-into-table designs assume the table never shrinks.
- Total volume is bounded by elapsed time, not by population. A 30-second 30 Hz simulation produces at most 900 frames; an append-only frame log is at most 900 rows. No need to recycle.
The cost is monotonic memory growth. A long-running simulator with append-only eaten accumulates millions of rows over hours. Mitigations:
- Periodic snapshot + truncate (the log is replaced by a recent slice).
- Tiered storage - recent in memory, older streamed to disk (§30).
- Just accept the memory, if the run is short.
Recycling. Use when:
- Steady-state size is small even though total inserted is large. The simulator’s
creaturestable at 100 000 alive with 100 000 deaths and 100 000 births per second - net flow zero, but total ever issued grows linearly. Recycling keeps memory bounded. - Memory matters. Recycling caps the table at the high-water mark of live rows.
The cost is reference-stability complications. A new row in a recycled slot has the same slot as a previous, removed row. Code holding an old slot reference would silently dereference the new row. The fix is generational ids: each slot has a generation counter that increments on every recycle. References hold (id, generation); dereference checks the generation. A stale reference fails its check.
A slot allocator looks like:
#![allow(unused)]
fn main() {
struct SlotPool {
free_slots: Vec<u32>, // freed slots awaiting reuse
next_slot: u32, // high-water mark; the next never-used slot
generation: Vec<u32>, // generation per slot
}
impl SlotPool {
fn allocate(&mut self) -> (u32, u32) {
let slot = self.free_slots.pop().unwrap_or_else(|| {
let s = self.next_slot;
self.next_slot += 1;
self.generation.push(0);
s
});
let g = self.generation[slot as usize];
(slot, g)
}
fn free(&mut self, slot: u32) {
self.generation[slot as usize] += 1;
self.free_slots.push(slot);
}
}
}allocate pops a freed slot if any are available, otherwise grows. free bumps the generation and adds the slot back to the free list. Stale references (with the old generation) cannot dereference the recycled row.
Choosing between them. Match the strategy to the table’s role:
| table | strategy | reason |
|---|---|---|
creatures | recycling | bounded population |
eaten | append-only | history record |
born | append-only | history record |
dead | append-only | history record |
pending_event | recycling | rebuilt every tick |
food | recycling | bounded |
food_spawner | constant | no removals |
Mixing strategies in one simulator is normal. The discipline is to be explicit about which table is which, and apply the right machinery to each.
Exercises
- Two append-only logs. Implement
eatenandbornas append-onlyVecs. After 1 000 ticks, examine the log lengths and verify they grow monotonically. - A recycling pool. Implement the
SlotPoolabove. Allocate 1 000 slots, free 500, allocate 500 more, observe the slot indices. Did the pool reuse the freed slots, or grow? - Stale reference detection. Allocate a slot with
(slot, generation=0). Free it. Allocate a new row in the same slot - its generation is 1. Try to dereference the old(slot, 0). The check fails; the reference is recognised as stale. - Switch creatures to append-only. Run the simulator with
creaturesas append-only (no recycling). Run for 10 000 ticks with steady birth and death. Plot the table’s length over time. It grows monotonically; memory increases without bound. - Switch eaten to recycling. Run with
eatenrecycled. After 100 ticks, all “what did this creature eat at tick 50” queries fail because the rows were reused. The history is gone.
Reference notes in 24_append_only_and_recycling_solutions.md.
What’s next
§25 - One writer, many readers is the rule that makes every other discipline in the phase work: each table is written by exactly one system.
Solutions: 24 - Append-only and recycling
Exercise 1 - Append-only logs
#![allow(unused)]
fn main() {
fn record_eat(eaten: &mut Vec<EatEvent>, tick: u64, creature: u32, food: u32) {
eaten.push(EatEvent { tick, creature, food });
}
fn record_birth(born: &mut Vec<BirthEvent>, tick: u64, parent: u32, offspring: u32) {
born.push(BirthEvent { tick, parent, offspring });
}
}After 1 000 ticks of a 100-creature simulation with average 5 events per tick, the logs hold ~5 000 entries each. The len() only grows. The order of entries reflects insertion order, which is deterministic (§16).
Exercise 2 - Recycling pool
Allocate 1 000 → slots 0-999 (high-water mark grows). Free 500 → slots 0-499 enter free_slots. Allocate 500 more → slots 0-499 are reused (LIFO from free_slots.pop()). The high-water mark stays at 1 000; no growth.
If you do not free anything, the pool grows indefinitely. If you free everything, the pool’s allocations always reuse.
Exercise 3 - Stale reference detection
#![allow(unused)]
fn main() {
let mut pool = SlotPool::new();
let (slot, gen0) = pool.allocate(); // (0, 0)
pool.free(slot); // generation[0] is now 1
let (slot2, gen1) = pool.allocate(); // (0, 1) - same slot, new generation
assert_eq!(slot, slot2);
assert_ne!(gen0, gen1);
// Old reference (slot, gen0) - should fail.
let valid = pool.generation[slot as usize] == gen0;
assert!(!valid);
}The check is two reads and a comparison. References that hold the wrong generation get None from the dereference; references that hold the right generation get Some(&row). No data corruption, no aliasing - the system is sound by construction.
Exercise 4 - Append-only creatures
Run with no recycling. Plot creatures.len() over time:
tick 0: 100
tick 1000: 1100
tick 10000: 11000
tick 100000: 101000
Linear growth, unbounded. Memory leaks. The fix is one of: (a) recycle creatures, (b) truncate-and-snapshot periodically, (c) accept the bound for short runs.
Exercise 5 - Recycling eaten
After 100 ticks, 90% of the eaten log has been overwritten by recent events. Asking “what did creature 42 eat at tick 50” returns either a different event (overwriting an old slot) or None if the old slot is on the free list. History is gone.
The lesson is the inverse of exercise 4: each strategy is correct for a kind of table, wrong for the other kind.
25 - One writer, many readers
Concept node: see the DAG and glossary entry 25.
Every table is written by exactly one system. One ECS system, not one function and not one thread: a single named place in the schedule that owns the right to mutate it. Many systems may read it.
The rule is small. Its consequences are everything.
|
|
Note - “Ownership” here means the right to write. Rust already gives ownership a precise meaning: who holds a value and is responsible for dropping it. This chapter uses the word for something narrower and related - which single system is allowed to mutate a table, the guarantee Rust’s |
Why it works. A row is a tuple (§6) - its fields are aligned by index. A table’s columns must be modified together to maintain alignment. A single writer guarantees this: only one place in the code mutates the table, so only one place can violate alignment, so testing one place is enough.
A table with two writers has two places where alignment can be violated. If they run concurrently, alignment is violated nondeterministically. If they run sequentially, the order matters and must be specified. Either way, the cost of getting it right grows superlinearly with the number of writers.
The disciplines that depend on it. All of these need single-writer ownership to work:
- §31 - Disjoint write-sets parallelize freely. Two systems with disjoint write-sets can run on different threads. The rule guarantees no shared mutation.
- §22 - Mutations buffer. A side-table writer (cleanup) is the only writer of
creatures. All other systems push toto_removeandto_insert, which they own. - §43 - Tests are systems. A test system reads everything and writes nothing. The ownership rule is what guarantees its reads see consistent state.
- The InspectionSystem pattern. A debug inspector holds read-only references to every table. Read-only access composes with single-writer ownership to make races structurally impossible.
What the rule looks like in practice.
#![allow(unused)]
fn main() {
fn motion(px: &mut [f32], py: &mut [f32], vx: &[f32], vy: &[f32], dt: f32) { /* writes px, py */ }
fn next_event(px: &[f32], py: &[f32], food: &[Food], pending: &mut [Event]) {
/* reads px, py, food; writes pending_event */
}
fn apply_eat(pending: &[Event], food: &[Food],
to_remove: &mut Vec<u32>, energy: &mut [f32]) {
/* reads pending, food; writes to_remove and energy */
}
}For each table, exactly one writer is allowed:
px,py: written only bymotion.pending_event: written only bynext_event.to_remove,to_insert: written by many systems, but each system writes only its own queued mutations; no one reads them until cleanup.creatures,food: written only bycleanup, which materialises every other system’s queued changes.
Multiple systems may contribute to a table by pushing to its side buffer; the actual single writer is cleanup. The architecture preserves the rule even as many systems propose mutations.
The borrow checker enforces this. Rust’s &mut [T] is the type-level expression of single-writer ownership: only one mutable reference can exist at a time. The borrow checker rejects code that violates it. The data-oriented discipline of single-writer-per-table is what Rust’s ownership model is for; the language enforces what the architecture demands.
Bugs that arise from violations. Two systems writing the same column produce inconsistent state. The bug is usually intermittent (depends on schedule), silent (no error reported, just bad data), and late-binding (manifests far from the cause). They are among the hardest bugs in any concurrent system. The single-writer rule eliminates them by construction.
The rule applies recursively. A view table whose entries are derived from another table inherits the ownership rule: a hungry: Vec<u32> is owned by the system that classifies hunger; no other system writes to it.
This is the rule that closes Memory & lifecycle. Without it, the buffering, swap_remove, index maps, and slot recycling are all unsafe in any concurrent or parallel context. With it, everything composes.
Exercises
- Identify the writers. For each table in your simulator (
creatures,food,food_spawner,pending_event,eaten,born,dead,hungry,to_remove,to_insert), name the one system that writes it. If you find a table with two writers, the rule is violated - investigate. - A constructed violation. Write two systems that both update
creature.energydirectly (not viato_remove/to_insert). Run them in sequence; observe correct results. Run them in parallel viastd::thread::scope; either Rust’s borrow checker rejects the code, or you observe a race. - Refactor. For one of the violations from exercise 1 (or 2), introduce a buffer table that one system writes and the other reads. The two systems are now writer-disjoint.
- Build an InspectionSystem. Write a system that takes
&(immutable) references to every table and returns aWorldSnapshotstruct. Run it after every tick. The system is read-only and never violates the rule. - Borrow checker. Try to write code where two systems hold
&mutto the sameVec. Rust refuses. Note the exact error message - this is the language enforcing the architecture. - (stretch) The cleanup system as canonical writer. In your simulator, audit: every mutation of
creatures,food, etc. flows through cleanup. Every other system writes only toto_remove,to_insert, or its own outputs. Verify the audit holds for the simulator end-to-end.
Reference notes in 25_ownership_of_tables_solutions.md.
What’s next
You have closed Memory & lifecycle. The simulator’s machinery is now complete: it can grow, shrink, recycle, parallelise, and replay. The next phase is Scale, starting with §26 - Subscription tables, keyed by slot. The simulator’s per-tick cost goes under the microscope.
Solutions: 25 - One writer, many readers
Exercise 1 - Identify the writers
| table | one writer | notes |
|---|---|---|
creatures | cleanup | every other system writes via to_remove/to_insert |
food | cleanup | written via to_remove(food) from apply_eat, plus to_insert(food) from food_spawn |
food_spawner | food_spawn (or admin) | constant-quantity in practice |
pending_event | next_event | rebuilt every tick |
eaten, born, dead | apply_eat, apply_reproduce, apply_starve | one writer per log |
hungry | classify_hunger | the system that decides hunger |
to_remove | many | side table; cleanup reads-and-clears |
to_insert | many | side table; cleanup reads-and-clears |
The to_remove / to_insert “many writers” is allowed because each system writes only its own pushes; nobody reads the side table until cleanup.
Exercise 2 - Constructed violation
#![allow(unused)]
fn main() {
// Two systems both write energy directly. Don't do this.
fn apply_eat_bad(food: &[Food], pending: &[Event], energy: &mut [f32]) {
for ev in pending {
if ev.kind == EAT { energy[ev.creature as usize] += 1.0; }
}
}
fn apply_decay_bad(energy: &mut [f32], dt: f32) {
for e in energy { *e -= 0.1 * dt; }
}
}Run sequentially: correct, but order matters. Run in parallel via std::thread::scope:
#![allow(unused)]
fn main() {
std::thread::scope(|s| {
s.spawn(|| apply_eat_bad(&food, &pending, &mut energy));
s.spawn(|| apply_decay_bad(&mut energy, dt));
});
}Rust’s borrow checker rejects the code: &mut energy cannot be borrowed twice. The language refuses to compile the violation.
Exercise 3 - Refactor
Add a side buffer:
#![allow(unused)]
fn main() {
fn apply_eat(food: &[Food], pending: &[Event], energy_delta: &mut Vec<(usize, f32)>) {
for ev in pending { if ev.kind == EAT { energy_delta.push((ev.creature as usize, 1.0)); } }
}
fn apply_decay(energy_delta: &mut Vec<(usize, f32)>, count: usize, dt: f32) {
for i in 0..count { energy_delta.push((i, -0.1 * dt)); }
}
fn apply_energy(energy: &mut [f32], deltas: &[(usize, f32)]) {
for &(i, d) in deltas { energy[i] += d; }
}
}Now apply_eat and apply_decay write to disjoint slices of energy_delta (use Vec::extend_from_slice from per-thread buffers, then merge). The single writer of energy is apply_energy. The rule holds.
Exercise 4 - InspectionSystem
#![allow(unused)]
fn main() {
struct WorldSnapshot {
creature_count: usize,
food_count: usize,
population_alive: usize,
energy_avg: f32,
}
fn inspect(world: &World) -> WorldSnapshot {
WorldSnapshot {
creature_count: world.creatures.len(),
food_count: world.food.len(),
population_alive: world.id_to_slot.iter().filter(|&&s| s != INVALID).count(),
energy_avg: if world.creatures.energy.is_empty() { 0.0 } else {
world.creatures.energy.iter().sum::<f32>() / world.creatures.energy.len() as f32
},
}
}
}fn(&World) -> Snapshot - read-only; no &mut anywhere. The system can run alongside any other system without violating ownership; multiple parallel readers are fine.
Exercise 5 - Borrow checker
let mut a = vec![1, 2, 3];
let r1: &mut Vec<i32> = &mut a;
let r2: &mut Vec<i32> = &mut a; // ERRORerror[E0499]: cannot borrow `a` as mutable more than once at a time
The error is the language enforcing the architecture. Two &mut borrows of the same Vec cannot coexist. By choosing &mut [T] everywhere our systems take their write-set, the compiler enforces single-writer ownership at compile time.
Exercise 6 - Audit
The audit should find:
- Every direct mutation of
creatureshappens incleanup. If it happens elsewhere, mark the location and refactor. - Every direct mutation of
foodhappens incleanup. Same rule. - Every system has a clearly declared write-set, expressed as
&mutparameters in its signature. - No system holds a
&mut World. Such a signature would allow it to write any table, violating the rule.
If the audit passes, the simulator is ready for parallelism (§31) without any further refactoring. If it fails, the failure points are the only places that need fixing.
26 - Subscription tables, keyed by slot
Concept node: see the DAG and glossary entry 26.
A system rarely touches every entity. Motion moves all of them, but starvation only reads the hungry, reproduction only the well-fed, a sleep timer only the sleeping. §17 gave the tool for “which entities are in this set”: a membership table. §19 measured the payoff: iterate the 100 000 hungry instead of scanning 1 000 000 and branching, and the work is proportional to the subset, not the population.
Call that membership table a subscription table, and the loop that walks it a system’s hot loop. A creature subscribes to hungry when its energy drops; it unsubscribes when it eats. The subscription is the system’s input; the hot loop is the system. This section settles a question §17 left open: what does a subscription table store, and how fast is the hot loop that reads it?
A wrong turn first: splitting fields.
The instinct many readers arrive with is to split the fields of a creature into hot and cold: put the fields an inner loop touches in one struct, the rarely-read fields in another, so a load does not drag in bytes the loop ignores. In a row-oriented (array-of-structs) world this is a real technique. In the structure-of-arrays world this book has used since §7, it is already done for you: every field is its own column. Reading px never touches birth_t; they are different arrays. There is no row to drag a cold field along with, so there is nothing to split. The bandwidth win that motivates a field split in AoS is the same win SoA already banked back in §7; it is not a separate technique to apply here.
So the attribute table is never split. It stays whole: every column, every slot, reachable by index i. What a system changes is not the table but how it reaches into it. Rather than scan the whole table and branch, a system keeps a subscription table, the slots i it cares about, and indexes straight in: no scan, no field split, direct access. The rest of this section is about making that direct access fast.
What a subscription stores: ids or slots.
A creature has a stable id and a current slot, its position in the attribute columns. id_to_slot maps one to the other. A subscription table can hold either, and the choice is not cosmetic.
- Hold ids. The hot loop reads an id, looks up
id_to_slot[id]to find the slot, then gathers the columns. One extra load per element, every tick. The table survives relocation untouched: when cleanup moves entities, onlyid_to_slotchanges. - Hold slots. The hot loop reads a slot and gathers the columns directly, no redirection. But when cleanup moves entities, every slot in every subscription is now stale and must be rewritten.
The redirection is paid every tick. The rewrite is paid once per cleanup interval. Which loses?
Measured. At 1 000 000 creatures with a tenth subscribed, the id-keyed hot loop runs about twice as slow as the slot-keyed one on a modern desktop1, and is the slower of the two on every machine measured. The cost is not the extra instruction. id_to_slot is a four-megabyte array and the subscribed ids are scattered through it, so each lookup is a cache miss before the column gather has even started. The slot key skips that miss entirely.
The rewrite the slot key pays in return is small and bounded. It scales with how many subscriptions an entity sits in (rewrite each table the entity appears in), but it happens once per cleanup interval, not once per tick. Across the realistic range, a handful of subscriptions and a cleanup every few dozen ticks, the per-tick saving buries the per-interval rewrite: the amortized verdict favours slot keys at every subscription count and interval tested, on every machine measured. The benchmark is ebp_partition; numbers below and in code/README.md.
So subscription tables hold slots. This is also why the lifecycle keeps stable slots and lets cleanup own the reindex: slot keys are only safe when one system is responsible for rewriting them when entities move. The cleanup can do that for any reference it owns - a subscription, or a cross-entity link stored in a column - remapping them all in one pass.
So what is the stable id for, once the hot loop runs on slots? For every reference the cleanup cannot reach to rewrite. A save file (§36), a replay log (§37) whose events are (entity, key, value), a packet on the wire, an entity the UI has selected, a snapshot a slow background system is still reading (§39): a slot is meaningless to all of them, because the next compaction moves it. They hold the id and resolve it through id_to_slot once, at the boundary (§35), never per element. Slots are an internal, momentary fact; the id (with its generation, §10) is the identity that survives a relocation, a save, and a network hop.
Locality: a slot-keyed loop is fast only when its slots are dense.
A slot-keyed hot loop gathers columns at the slots the subscription lists. If those slots are scattered through the column, which is what churn produces as deaths and births leave holes, the gather misses cache on nearly every element. If they are contiguous, the gather streams. Compacting the live, subscribed entities to the front of the columns turns a scattered gather into a sequential one; measured, that is several times faster2. The compaction is not free, but it pays for itself within a few ticks3, and it is the same batch pass that reclaims dead slots. §28 is that pass.
The one case a split would help, in full view.
There is a single scenario where grouping fields would still pay. A hot loop that reads several columns at scattered slots touches one cache line per column per element; interleaving those columns into one record would touch one. That case is real, and worth stating plainly rather than hiding behind the principle. We keep the columns separate anyway. The book’s answer to scatter is to remove it: compaction (§28) makes the subscribed slots dense, a dense gather streams each column at full bandwidth, and the per-column cost the interleaving would have saved is gone, paid back within a few ticks. Interleaving would also forfeit what SoA bought in §7, whole-column streaming and SIMD, on every loop that is not scattered, to win the one that is. So the rule stands with its exception in the open: keep the columns separate, and compact when the gather scatters.
Name the subscription before you build it.
A subscription is earned by a system that genuinely processes a subset. “Most creatures are not hungry on most ticks, so hungry is far smaller than the population” is a sound reason to build one. “Every creature is always in alive, but other engines keep an alive-set” is not. A subscription that holds the whole population is a scan-all with extra bookkeeping, and the measurement says so: at full participation the subscription loop is marginally slower than a plain scan. The subscription wins in proportion to how much it excludes, and not otherwise.
The payoff is not only speed; it is extensibility. An entity’s character is just the set of subscriptions that hold it - a grazer is “the herd-motion table plus the graze-forage edge,” no more - so a new kind of entity is a new subscription, not a new type threaded through the code. The reference simulator adds a predator exactly this way: register a predators subscription, wire two systems (herd-motion and a forage edge onto grazers), and the pass that maintains subscriptions never learns a predator exists, because it maintains every one of them the same way. Diff the sim2 binary against sim and a whole trophic level costs about six lines, with nothing existing edited. Composition, not surgery - the extensibility the architecture keeps promising, made literal and measurable in a diff.
Measurements
The prose quotes the modern-desktop figure; the spread across the reference machines is below. The amortized keying verdict (slot vs id) favours slot keys at every subscription count S and interval G on every machine. Full per-machine output: ebp_partition in code/README.md.
| # | measurement | Ryzen 9 (modern) | i7-3610QM (2012) | i3-5010U (2015) | Pi 4 |
|---|---|---|---|---|---|
| 1 | id-keyed ÷ slot-keyed hot loop, 1M @ 10% | 2.2x | 3.2x | 1.3x | 1.4x |
| 2 | scattered ÷ compacted gather, 1M @ 10% | 4.4x | 6.8x | 9.0x | 9.0x |
| 3 | compaction payback | 3.0 ticks | 1.5 ticks | 1.1 ticks | 0.7 ticks |
Exercises
These extend the simulator’s creature columns and the id_to_slot map from §23.
- Build a slot-keyed subscription. Add
hungry: Vec<u32>holding the slots of hungry creatures. A creature subscribes (push its slot) whenenergy[slot]drops below a threshold. Write the hot loop: iteratehungry, gather the columns by slot directly. Verify it touches only the subscribed creatures. - Key it by id instead, and time both. Build a second version where
hungryholds entity ids and the hot loop resolves each throughid_to_slot[entity]before the gather. At 1M creatures with 10% subscribed, time both hot loops. Reproduce the ~2x gap. Where does the id version’s time go? Compare the size ofid_to_slotwith one cache line. - Unsubscribe in O(1). When a creature stops being hungry, remove its slot from
hungrywithswap_remove. What do you need alongsidehungryto find the slot’s position in the table without scanning it? (It is the §23 trick again, one level up.) - Reindex on compaction. Relocate the live creatures to the front of the columns (a stand-in for the §24/§28 cleanup), producing an old-slot to new-slot map. Rewrite the slot-keyed
hungrythrough that map; confirm the hot loop still processes the same creatures. Now do the same for the id-keyed version: what has to change? Time both reindex passes. - Dense vs scattered. Time the slot-keyed hot loop with the subscription’s slots scattered through the column, then again after compacting them to the front. Reproduce the several-fold speedup. How many ticks of hot-loop saving pay back one compaction pass?
- The subscription that holds everyone. Subscribe every creature and time the hot loop against a plain
for i in 0..nscan. The subscription should be no faster, and slightly slower. Explain why, and state the rule for when a subscription is worth building. - (stretch) Two subscriptions, one entity. Put creatures in both
hungryandsleepy. On compaction, both tables need rewriting. Measure how the reindex cost grows with the number of subscriptions an entity sits in, and argue why it stays cheaper than the id key’s per-tick redirection for any realistic cleanup interval.
Reference notes in 26_subscription_tables_solutions.md.
What’s next
§27 - Working set vs cache puts numbers on the question this section kept leaning on: how big is the hot loop’s footprint, and what cache level does it fit in?
Solutions: 26 - Subscription tables, keyed by slot
Throughout, i is a slot (a creature’s position in the columns) and entity is a stable id. The numbers below are modern-desktop figures from ebp_partition at N = 1 000 000; the chapter’s Measurements table and code/README.md carry the per-machine spread.
Exercise 1 - Build a slot-keyed subscription
hungry holds the slots of hungry creatures. A creature subscribes when its energy crosses below the threshold; a parallel in_hungry: Vec<bool> (one per slot) stops it being pushed twice.
#![allow(unused)]
fn main() {
let mut hungry: Vec<u32> = Vec::new(); // slots, not ids
let mut in_hungry: Vec<bool> = vec![false; n];
fn classify(energy: &[f32], in_hungry: &mut [bool], hungry: &mut Vec<u32>, thr: f32) {
for i in 0..energy.len() {
if energy[i] < thr && !in_hungry[i] {
hungry.push(i as u32);
in_hungry[i] = true;
}
}
}
// the hot loop: walk the subscription, index the columns directly by slot
fn feed(energy: &mut [f32], hungry: &[u32], feed: f32) {
for &i in hungry {
energy[i as usize] += feed;
}
}
}The hot loop never looks at a creature that is not hungry. There is no scan of the attribute table and no branch.
Exercise 2 - Key it by id instead, and time both
#![allow(unused)]
fn main() {
fn feed_id(energy: &mut [f32], hungry_id: &[u32], id_to_slot: &[u32], feed: f32) {
for &entity in hungry_id {
let i = id_to_slot[entity as usize] as usize; // the extra hop
energy[i] += feed;
}
}
}Measured, 10 % subscribed: the slot-keyed loop runs about 0.38 ms/pass, the id-keyed loop about 0.85 ms/pass - roughly 2x. The id version’s extra time is the id_to_slot[entity] load. id_to_slot is a 4 MB array (one u32 per id at 1M ids) and the subscribed entities are scattered through it, so consecutive entries almost never share a 64-byte cache line: the lookup is a miss before the column gather has even started. The slot key has no such array to consult.
Exercise 3 - Unsubscribe in O(1)
To swap_remove slot i out of hungry you need its position in the table, not the slot value. Keep a parallel pos: Vec<u32> mapping a slot to its index in hungry - the §23 trick, one level up (there it mapped id to slot; here it maps slot to table-position).
#![allow(unused)]
fn main() {
fn unsubscribe(hungry: &mut Vec<u32>, pos: &mut [u32], in_hungry: &mut [bool], i: u32) {
let p = pos[i as usize] as usize;
let moved = *hungry.last().unwrap(); // the slot that will backfill p
hungry.swap_remove(p);
pos[moved as usize] = p as u32; // its new table-position
in_hungry[i as usize] = false;
}
}pos is itself indexed by slot, so it rides along with the columns and must be rebuilt at compaction (Exercise 4), the same as any other slot-keyed structure.
Exercise 4 - Reindex on compaction
Compaction produces old_to_new[old_slot] = new_slot for the survivors. The slot-keyed subscription is rewritten through it in one pass:
#![allow(unused)]
fn main() {
fn reindex(hungry: &mut [u32], old_to_new: &[u32]) {
for i in hungry.iter_mut() {
*i = old_to_new[*i as usize];
}
}
}The id-keyed version needs no change to hungry_id: it holds entities, and entities do not move. Only id_to_slot is rebuilt over the live set - which the slot-keyed design also rebuilds, because identity at the boundary still resolves through it.
Measured, ~100 000 live: the id-keyed reindex is about 0.13 ms (rebuild id_to_slot); the slot-keyed reindex is about 0.17 ms at one subscription per entity (the same rebuild plus the table rewrite). Both run once per cleanup interval, not once per tick - which is why the slot key wins overall (Exercise 7).
Exercise 5 - Dense vs scattered
Measured: the slot-keyed hot loop costs about 0.37 ms/pass when the subscribed slots are scattered through the column, and about 0.084 ms/pass after compacting them to the front - roughly 4.4x. The compaction pass itself costs about 0.88 ms (one batch reindex of the ~100 000 live). It saves ~0.29 ms/pass, so it pays for itself after about 3 passes (ticks) and is pure profit until churn re-scatters the slots. This is the same pass as §28 and the same pass that reclaims dead slots (§24).
Exercise 6 - The subscription that holds everyone
Measured at full participation: the subscription loop costs about 1.20 ms/pass, a plain for i in 0..n scan about 1.03 ms/pass. The subscription is slower. It does the same N column touches, plus an extra read of the subscription array per element, and it gives up the clean 0..n bound the compiler optimises best.
The rule: build a subscription when the subset is durably a fraction of the population (hungry, sleeping, in-combat). For a set that holds nearly everyone on most ticks (alive), scan. A subscription earns its keep by what it excludes; one that excludes nothing is bookkeeping with no payoff.
Exercise 7 - Two subscriptions, one entity
On compaction every subscription an entity sits in must be remapped, so the slot-keyed reindex grows with the count S. Measured, ~100 000 live: about 0.17 ms at S = 1, 0.23 ms at S = 2, 0.36 ms at S = 4. The id-keyed reindex stays flat (~0.13 ms) because the id tables are never touched.
The slot key still wins, decisively, because the two costs live on different clocks. The reindex is paid once per cleanup interval; the id key’s redirection (~0.47 ms/pass) is paid every tick. Over a 30-tick interval the slot key saves about 14 ms in the hot loop and spends at most ~0.4 ms more in reindex. For any realistic interval and any small S, slots win - which is the measured basis for keying subscriptions by slot.
27 - Working set vs cache
Concept node: see the DAG and glossary entry 27.
The working set of a loop is the data it touches per pass. The cache hierarchy (§1) is what holds that data. The two together decide the loop’s speed.
Which cache level holds the working set decides the loop’s speed. The numbers below are measured on the four reference machines (code/README.md), not theoretical - the modern desktop sits at the low end of each range, the Pi 4 at the high end. A flat streaming sum stays under ~0.5 ns/element in L1 (cache_cliffs). Motion’s 20-byte loop, swept sequentially, measures ~0.3-4 ns/creature in L2 (10K creatures), ~0.4-10 ns in L3 (1M), and ~0.7-17 ns once it spills to RAM (10M)1. Sequential access stays bandwidth-bound and cheap on every machine; the expensive regime is random order, ~30-390 ns/creature at 10M3.
If you ran §1’s exercises and exercise 2 below, you have your own machine’s numbers. Treat the spread above as the envelope between slow and fast hardware, not an absolute.
Computing the working set is mechanical. Motion’s inner loop reads px, py: f32 = 8 bytes, vx, vy: f32 = 8 bytes, energy: f32 = 4 bytes. Total: 20 bytes per creature. At N creatures, working set = 20 × N bytes.
| N | working set | regime |
|---|---|---|
| 1 000 | 20 KB | fits L1 |
| 10 000 | 200 KB | fits L2 |
| 100 000 | 2 MB | borderline L2/L3 |
| 1 000 000 | 20 MB | fits L3, spills L2 |
| 10 000 000 | 200 MB | spills L3, hits RAM |
Sequential streaming barely shows the cliff: the prefetcher keeps motion bandwidth-bound, so per-creature time climbs only gently into RAM - roughly 0.3 ns at 10K rising to 0.7 ns at 10M on a modern desktop, 4 ns rising to 17 ns on a Pi 4. The steep cliff is in random order (exercise 5): at 10M creatures, random access costs ~30 ns/creature on the desktop and ~390 ns on the Pi. The per-machine ladder is motion_working_set in code/measurement; the numbers are in code/README.md.
This is what §4’s “cliff” was about, made concrete for your simulator. The transition points are not magic - they are arithmetic over your cache sizes.
The working set is exactly the columns the loop reads, no more: SoA hands you that for free, because there is no wider row to trim (§7 again). From there, two levers push the cliff outward. A narrower field (§2) cuts the bytes per creature - dropping energy from f64 to f32 is 4 bytes per creature off the set. And a system that touches only a subset can subscribe (§26), cutting the count rather than the width. Motion reads every creature, so its lever is field width and access order, not subscription.
The implication is design discipline:
- Decide the target N before the schema. The schema must fit the cache that fits N.
- Audit the inner loops. Sum the bytes per row touched. Compare to your cache sizes.
- When you cross a transition, measure - do not assume. The prefetcher and the OS will sometimes save you, sometimes not.
- The narrowest field that holds the value (§2) is not aesthetic; it is the cliff’s distance.
This is not premature optimisation. It is layout-aware design - making the schema fit the machine that will run it. A schema that ignores the cache works for small N and breaks at the scales the simulator was meant for.
Measurements
Sequential motion stays cheap into RAM (the prefetcher keeps it bandwidth-bound); the cliff is in random order. The §27 “ns/element ladder” is really a random-access ladder. Full output: code/README.md.
| # | measurement | Ryzen 9 (modern) | i7-3610QM (2012) | i3-5010U (2015) | Pi 4 |
|---|---|---|---|---|---|
| 1 | motion sequential, ns/creature @ 1M | 0.44 | 1.70 | 3.30 | 10.05 |
| 2 | motion sequential, ns/creature @ 10M | 0.71 | 1.80 | 3.15 | 17.38 |
| 3 | motion random, ns/creature @ 10M | 31 | 80 | 84 | 392 |
| 4 | L1 vs L2, streaming motion | 1.02x | 1.19x | 1.20x | 1.08x |
Exercises
- Compute your working sets. For each system in your simulator, compute
bytes per row × Nfor N = 1K, 10K, 100K, 1M, 10M. Note which cache level each falls into for your machine. - Find your cliff. Time motion at N = 1K, 10K, 100K, 1M, 10M. Plot ns-per-element against N. The transitions should match your cache sizes.
- The unused column costs nothing. Add a
birth_t: f64column that motion never reads. Recompute motion’s working set and repeat exercise 2. The cliff should not move: in SoA a column a loop does not read sits in its own array, untouched, so it adds zero to that loop’s working set. (In an array-of-structs world it would have widened every row and moved the cliff inward - the difference SoA buys you.) - A wider field. Change
energy: f32toenergy: f64. Recompute the working set. Repeat exercise 2. The cliff should move inward (closer to smaller N). - Random vs sequential. Repeat motion’s loop with
for &i in random_indicesinstead offor i in 0..N. At 10M creatures the per-element time rises by roughly 25-45× (random RAM access vs sequential). A single-pointer chase shows a wider gap; motion’s is smaller because each creature amortises five columns. - (stretch) The L1 sweet spot. Find the N at which motion’s working set fills L1 to roughly 75 %. Run the loop in tight repetition and compare to the closest L2-only neighbour. For sequential motion the difference is small - measured 1.0-1.2× across the four reference machines (
l1_sweet_spot)4, because the loop is bandwidth-bound at both sizes and the prefetcher hides the L1/L2 boundary. The dramatic L1 win shows up when the access is random (exercise 5), not streaming.
Reference notes in 27_working_set_vs_cache_solutions.md.
What’s next
§28 - Proximity is a property of position answers the neighbour query the simulator has been deferring - and shows that the spatial index you reach for is one you never have to keep.
Solutions: 27 - Working set vs cache
Exercise 1 - Compute working sets
For motion (reads pos: 8B, vel: 8B, energy: 4B = 20 B per row):
| N | working set | regime |
|---|---|---|
| 1 000 | 20 KB | fits L1 |
| 10 000 | 200 KB | fits L2 |
| 100 000 | 2 MB | borderline L2/L3 |
| 1 000 000 | 20 MB | fits L3, spills L2 |
| 10 000 000 | 200 MB | spills L3, hits RAM |
For apply_eat (reads pending: 24B, food: 8B, energy: 4B ≈ 36 B):
A pending event is only active for one tick, so the working set is 36 × pending_count, not 36 × N. Even with 10K events per tick, the working set is 360 KB - comfortably L2.
Exercise 2 - Find your cliff
Run the loop:
#![allow(unused)]
fn main() {
fn motion_bench(px: &mut [f32], py: &mut [f32], vx: &[f32], vy: &[f32], energy: &[f32], dt: f32) {
for i in 0..px.len() {
px[i] += vx[i] * dt;
py[i] += vy[i] * dt;
// (dummy use of energy to keep it in the working set)
std::hint::black_box(energy[i]);
}
}
}Plot ns-per-element vs N. On a typical desktop:
- 1K: ~0.3 ns
- 10K: ~0.5 ns
- 100K: ~1 ns
- 1M: ~2.5 ns
- 10M: ~6 ns
- 100M: ~10 ns
The transitions at 100K (L2 boundary) and 10M (L3 boundary) are the visible cliffs.
Exercise 3 - The unused column costs nothing
Adding birth_t: f64 leaves motion’s working set at 20 B per creature, and the cliff does not move. Motion reads px, py, vx, vy, energy; birth_t lives in its own array that the loop never touches, so it contributes nothing to the bytes streamed per pass. In an array-of-structs layout the same field would have widened every record from 20 B to 28 B and pulled the cliff inward by ~30 % in N. That gap is the SoA win (§7): the working set is the columns you read, never the columns you store.
Exercise 4 - A wider field
Switching energy: f32 → energy: f64 adds 4 B per row → 24 B total. For a fixed L3 size, the maximum N that fits drops by ~17 %. The cliff moves inward.
Exercise 5 - Random vs sequential
Sequential RAM access stays bandwidth-bound: motion’s loop measures ~0.7-17 ns/creature at 10M (modern desktop to Pi 4, the prefetcher helping). Random RAM access is ~30-390 ns/creature - the prefetcher cannot help. The gap is ~25-45× depending on hardware (motion_working_set, code/README.md). The same algorithm, two access patterns; an order of magnitude or more apart.
Exercise 6 - The L1 sweet spot
L1 is 32 KB. 32 KB / 20 B per row ≈ 1 600 rows fills L1. At 75 % fill, ~1 200 rows. Run motion at N = 1 200 and at N = 10 000. The 1 200 case stays in L1 throughout; the 10 000 case spills.
Typical: 1 200 → 0.2 ns/elem; 10 000 → 0.5 ns/elem. About 2.5× faster for the L1-resident loop. The exact ratio depends on how aggressive the compiler is at vectorising - both loops should auto-vectorise to AVX2 or AVX-512.
28 - Proximity is a property of position
Concept node: see the DAG and glossary entry 28.
Creatures eat the food they encounter. So next_event has to answer, for every creature, which food is within reach? At §1’s ten thousand that is a cheap scan. At §2’s million it is a wall: comparing every creature to every food is O(C×F). Measured, even twenty thousand all-pairs neighbour tests cost ~270 ms on a modern desktop1 (and close to a second on the older reference machines) - many frames’ budget spent on a fraction of the world.
The reflex is to reach for a spatial index: a quadtree, a grid hash, a structure that lives beside the world, that you insert into and delete from as things move, that you query. It works. But stop and look at what it is: a second copy of information the world already holds - position - with its own maintenance budget, its own allocations, and pointer-chased buckets that miss cache on every hop.
Step back and ask what proximity is. It is a function of position. And position is already owned and streamed, every tick, by the motion system. The cell a creature falls in is one line - cell = f(px, py) - computed in the pass motion is already making, branchless, SIMD-friendly. The index was never necessary. The cell is a property you read off position.
Bin, don’t index. Compute each creature’s cell, then place the creatures into per-cell buckets with a counting sort: histogram the cells, prefix-sum into offsets, scatter the indices into one dense array. No HashMap, no per-cell allocation, no pointer-chasing - three linear passes over contiguous memory. A neighbour query reads the 3x3 block of cells around a point as contiguous ranges.
#![allow(unused)]
fn main() {
// cell id per creature - the SIMD-friendly byproduct of the position stream
let cell: Vec<u32> = (0..n).map(|i| cell_of(px[i], py[i])).collect();
// counting sort into a dense CSR bucket array: offsets[c]..offsets[c+1]
let mut offsets = vec![0u32; ncells + 1];
for &c in &cell { offsets[c as usize + 1] += 1; }
for c in 0..ncells { offsets[c + 1] += offsets[c]; }
let mut items = vec![0u32; n];
let mut cursor = offsets.clone();
for i in 0..n { let c = cell[i] as usize; items[cursor[c] as usize] = i as u32; cursor[c] += 1; }
}Measured (proximity, 1M creatures): the dense bin answers the neighbour query about 2.8x faster than the bolt-on HashMap on a modern desktop2, and is ahead on every machine measured (nearer 1.6x on the small-cache Broadwell NUCs). The hash spends its time allocating buckets and chasing them; the dense bin streams.
The sharpest number is the build itself. Rebuilding the entire spatial structure from scratch costs around one percent of the query it serves3. So the whole reason a bolt-on index exists, “don’t pay to rebuild,” is optimising about one percent of the work. You do not maintain proximity across ticks. You recompute it from the position stream each tick, for free, in the pass motion already makes. Recompute from the stream beats maintain a structure, and the old question of how often to re-sort the world simply evaporates: there is no kept structure to schedule.
|
|
Warning - “Binning is O(N)” hides an assumption: constant density. The query reads a 3x3 block of cells, which is cheap only while a cell holds a roughly fixed number of creatures. In a fixed world more creatures means fuller cells, so the block you scan grows with N and the whole pass is O(N²) again, with the grid still in place. The words missing from “O(N)” are “at constant density,” and density is a design choice. Measured on the reference forage ( |
When you only need one answer, ask the cell once. The chapter opened with a creature eating the nearest food in reach - one answer per creature, not a list. So you never need every occupant of the 3x3 block; you need one. Collapse each cell to a single representative - the first occupant will do - and a query reads at most nine representatives whatever the density, which restores O(N) even in a fixed world. The price is an approximation: a creature takes its cell’s representative, not provably the nearest of a crowded cell. But the error is bounded by one cell, and the cell is already the resolution the grid quantises position to, so the approximation sits below what the model can see. Measured, the representative held linear (~3x per 3x population) exactly where the exhaustive 3x3 scan went quadratic. The cell stops being a bucket you search and becomes a lookup you read: ask the cell who is in it, do not measure every pair.
The gather still scatters, and that is §26’s job. Binning finds the candidates cheaply, but reading their positions jumps around the columns. Making that gather dense is the compaction from §24/§26: the same batch pass that reclaims dead slots can reorder the survivors by cell (a Z-order curve keeps neighbouring cells adjacent in memory), so a cell’s creatures land on adjacent cache lines. That reorder is the GC’s slow-cadence pass, not a separate spatial sort with its own knob. §28 says which cell; §26 makes reading the cell stream.
#![allow(unused)]
fn main() {
fn cell_of(px: f32, py: f32, cell_size: f32) -> u32 {
let x = (px / cell_size).floor() as i32;
let y = (py / cell_size).floor() as i32;
// simple stripe pack; a Z-order (Morton) hash keeps 2D neighbours close in 1D
((x as u32 & 0xFFFF) << 16) | (y as u32 & 0xFFFF)
}
}|
|
Note - Binning answers who is near now, at the sampled positions of this tick. Reusing it for collision smuggles in an assumption: that motion between samples is linear and the step is small. When the step is large, or event-driven with variable length (§12), two fast movers can swap sides inside one step - a long travel vector crossing a short one - and share no cell at any sampled instant. The bin never sees them meet; they tunnel through each other. A finer grid does not fix it; swept (continuous) detection does: solve for the time within the step at which the two linear paths first come within radius. That solve is a quadratic in |
The same lesson at the global scale: the pack-leader. Swarming beasts look coordinated, but if every beast accounts for every other - cohesion, alignment, separation against all N - the cost is O(N²) (~240 ms at twenty thousand). The way the old games did it: put an abstract, invisible leader at the centre of the pack. The leader does the one expensive thing, deciding where the pack goes; each beast subscribes to the leader and steers relative to it. One centroid pass, every member reads one value: O(N), some 9000x cheaper at the same twenty thousand on a modern desktop4 (thousands of times on every machine), and the gap grows with N. Lifelike swarm behaviour, no all-pairs accounting. The “who is near the group” question, like “who is near me,” is answered by a single pass over position, not by a structure every agent maintains.
The meta-lesson is the one worth keeping. Twice now the cheap path was to refuse the obvious data structure - the id_to_slot hop in §26, the spatial index here - and instead let the system that already owns the data produce the answer in the pass it already makes. Ask what the problem is before reaching for a structure to make it fit. Proximity is position; position is already in hand.
Measurements
The prose quotes the modern-desktop figure; the spread across the reference machines is below. Full per-machine output: proximity in code/README.md. The density-wall and representative figures come from forage_scaling on the modern desktop; cross-machine measurement is pending, but the shape they show - quadratic at fixed world, linear once density is held or the cell is collapsed to a representative - does not depend on the machine.
| # | measurement | Ryzen 9 (modern) | i7-3610QM (2012) | i3-5010U (2015) | Pi 4 |
|---|---|---|---|---|---|
| 1 | all-pairs neighbour test, N = 20 000 | 270 ms | 864 ms | 960 ms | 1720 ms |
| 2 | dense bin vs bolt-on hash, 1M (end to end) | 2.8x | 1.7x | 1.6x | 1.5x |
| 3 | dense bin rebuild ÷ its query, 1M | 0.7 % | 1.0 % | 1.4 % | 0.8 % |
| 4 | pack-leader vs all-pairs cohesion, N = 20 000 | 9087x | 7296x | 6712x | 9439x |
Exercises
- The all-pairs wall. For N agents in a box, count neighbours within radius
rby testing every pair. Time it at N = 1K, 10K, 20K. Confirm the O(N²) curve, and that 20K alone already exceeds a 30 Hz frame budget. - Cell as a derived column. Write
fn cell_of(px, py, cell_size) -> u32. Compute thecellcolumn for a 1M-creature world in the same loop that would update position. Note that it adds one cheap arithmetic op per creature to a pass you are already making. - Dense binning. Build the CSR bucket array (count, prefix-sum, scatter). Answer “neighbours within
r” by reading the 3x3 cell block. Verify it gives the same counts as exercise 1. - Bolt-on hash vs dense bin. Build the same query with a
HashMap<cell, Vec<u32>>. At 1M, time build and query for both. Reproduce the ~2.8x end-to-end gap; note where the hash spends its time (allocation, pointer-chasing) against the dense bin’s contiguous streams. - Recompute beats maintain. Measure the dense bin’s build as a fraction of its query. Confirm it is roughly 1%. Argue why maintaining a spatial index incrementally (to “save” the rebuild) optimises the wrong thing.
- The pack-leader. Steer N agents toward the group two ways: each averaging the other N-1 positions (all-pairs), and each reading one centroid computed in a single pass. Time both; reproduce the O(N²) vs O(N) gap. Argue why the leader gives swarm-like behaviour without any agent knowing about any other.
- (stretch) Z-order and the compaction. Replace the stripe pack with a Z-order (Morton) hash. Then order the §24 compaction by cell and re-time the neighbour query’s gather (§26). How much of the remaining query cost was the scattered gather?
- The density wall and the representative. Take your dense-bin query from exercise 3. Grow the population in a fixed world (100K, 300K, 1M) and confirm the per-query cost grows faster than linearly - the 3x3 block is filling, the grid is quadratic again. Now answer the one-nearest query by keeping a single representative per cell (the first occupant) and reading the nine neighbour representatives; re-time the sweep and confirm it holds linear. Then measure how often the representative differs from the true nearest, and confirm every difference lies within one cell - the approximation is bounded by the grid’s own resolution.
Reference notes in 28_proximity_solutions.md.
What’s next
§29 - The wall at 10K → 1M is where these techniques start to bind. Code that ran fine at 10K stops running fine at 1M; the chapter is about finding out where and why.
Solutions: 28 - Proximity is a property of position
Numbers below are the modern-desktop figures from the proximity benchmark; the chapter’s Measurements table and code/README.md carry the four-machine spread.
Exercise 1 - The all-pairs wall
#![allow(unused)]
fn main() {
fn count_all_pairs(px: &[f32], py: &[f32], r: f32) -> u64 {
let n = px.len();
let mut total = 0u64;
for i in 0..n {
for j in 0..n {
if i != j {
let dx = px[i] - px[j];
let dy = py[i] - py[j];
if dx * dx + dy * dy <= r * r { total += 1; }
}
}
}
total
}
}Measured: ~270 ms at N = 20 000. The cost is N², so 10K is ~4x cheaper and 1M is ~2500x more expensive (a thousand seconds - never). Twenty thousand creatures already blow a 33 ms frame budget eight times over, on a query the world has to answer every tick.
Exercise 2 - Cell as a derived column
#![allow(unused)]
fn main() {
fn cell_of(px: f32, py: f32, cell_size: f32) -> u32 {
let x = (px / cell_size).floor() as i32 as u32 & 0xFFFF;
let y = (py / cell_size).floor() as i32 as u32 & 0xFFFF;
(x << 16) | y
}
// computed in the same pass that integrates motion:
for i in 0..n {
px[i] += vx[i] * dt;
py[i] += vy[i] * dt;
cell[i] = cell_of(px[i], py[i], cell_size); // one extra arithmetic op
}
}The cell column costs a divide, two floors, and some bit ops per creature, in a loop that is already streaming px/py. It rides on bandwidth motion is already paying. There is no separate structure and no separate pass.
Exercise 3 - Dense binning
#![allow(unused)]
fn main() {
// count -> prefix-sum -> scatter (a counting sort by cell)
let mut offsets = vec![0u32; ncells + 1];
for &c in &cell { offsets[c as usize + 1] += 1; }
for c in 0..ncells { offsets[c + 1] += offsets[c]; }
let mut items = vec![0u32; n];
let mut cursor = offsets.clone();
for i in 0..n {
let c = cell[i] as usize;
items[cursor[c] as usize] = i as u32;
cursor[c] += 1;
}
// query: the 3x3 block of cells around creature i, as contiguous ranges
for (nx, ny) in neighbours_3x3(i) {
let c = ny * GX + nx;
for &j in &items[offsets[c] as usize .. offsets[c + 1] as usize] {
// distance test against j
}
}
}The counts match exercise 1 exactly (it is the same query, restricted to candidates that can possibly be within r). Three linear passes build it; the query reads contiguous ranges.
Exercise 4 - Bolt-on hash vs dense bin
The HashMap<u32, Vec<u32>> version inserts each creature into grid.entry(cell).or_default().push(i), and the query does grid.get(&c) for each of nine cells.
Measured at 1M:
| build | query | total | |
|---|---|---|---|
| bolt-on hash | 31 ms | 1437 ms | 1468 ms |
| dense bin | 3.7 ms | 513 ms | 517 ms |
End to end the dense bin is ~2.8x faster, its build ~8x faster. The hash pays for a heap allocation per occupied cell, hashes a key for every insert and every one of the nine lookups per query, and chases a pointer into a separately-allocated Vec whose contents are scattered across the heap. The dense bin has one offsets array and one items array; the query indexes offsets and walks a contiguous slice. Same algorithm, opposite memory behaviour.
Exercise 5 - Recompute beats maintain
The dense bin’s build is 3.7 ms; its query is 513 ms. The build is 0.7% of the query. A maintained index exists to avoid paying that rebuild - so it is buying a 0.7% saving, and paying for it with insert/remove bookkeeping on every move, a structure that must stay correct across ticks, and (for a hash) pointer-chasing on every access. Recomputing the whole binning from scratch each tick, in the motion pass, is both simpler and faster. The maintenance you were told you need is maintenance of the wrong thing.
Exercise 6 - The pack-leader
#![allow(unused)]
fn main() {
// all-pairs cohesion: each agent steers toward the average of all others - O(N^2)
for i in 0..n {
let (mut sx, mut sy) = (0.0, 0.0);
for j in 0..n { if i != j { sx += px[j]; sy += py[j]; } }
steer[i] = (sx / (n - 1) as f32 - px[i], sy / (n - 1) as f32 - py[i]);
}
// one leader/centroid: one pass for the centre, every agent reads it - O(N)
let (mut cx, mut cy) = (0.0, 0.0);
for i in 0..n { cx += px[i]; cy += py[i]; }
cx /= n as f32; cy /= n as f32;
for i in 0..n { steer[i] = (cx - px[i], cy - py[i]); }
}Measured at N = 20 000: all-pairs cohesion ~240 ms, one centroid ~0.03 ms - about 9000x, and the gap grows linearly with N because one side is O(N²) and the other O(N). The leader gives swarm-like motion without any agent knowing about any other: each beast only ever reads the single shared centre (or, for richer behaviour, an invisible leader NPC that does the pack’s navigation). Coordination cost collapses from “every pair” to “one pass.”
Exercise 7 - Z-order and the compaction
A stripe pack (x << 16 | y) puts cells with the same x adjacent; cells one step apart in y are adjacent, but a step in x jumps 65 536 cells away. A Z-order (Morton) curve interleaves the bits so 2D neighbours stay close in the 1D order in both axes:
#![allow(unused)]
fn main() {
fn morton_2d(x: u16, y: u16) -> u32 {
let mut x = x as u32; let mut y = y as u32;
x = (x | (x << 8)) & 0x00FF00FF; x = (x | (x << 4)) & 0x0F0F0F0F;
x = (x | (x << 2)) & 0x33333333; x = (x | (x << 1)) & 0x55555555;
y = (y | (y << 8)) & 0x00FF00FF; y = (y | (y << 4)) & 0x0F0F0F0F;
y = (y | (y << 2)) & 0x33333333; y = (y | (y << 1)) & 0x55555555;
x | (y << 1)
}
}Binning finds the candidates, but the neighbour query still gathers their positions from scattered slots - that is the bulk of the ~513 ms. Order the §24 compaction by Morton cell so a cell’s creatures sit on adjacent cache lines, and the gather streams (§26’s measured ~4x for scattered-vs-dense). The compaction runs on the GC’s slow cadence, not as a separate per-tick sort: §28 decides which cell; the compaction makes reading a cell sequential.
Exercise 8 - The density wall and the representative
In a fixed world, growing the population grows the density: a cell of fixed size holds more creatures, so the 3x3 block a query reads holds O(N) of them, and the per-query cost is O(N) - over all targets, O(N²). The dense bin did not buy O(N); it bought O(N) at constant density. Sweeping 100K -> 300K -> 1M in a fixed world, the per-query time grows faster than 3x per step (the reference forage grew ~8x then ~11x) - the quadratic, with the grid in place.
The representative breaks it. Keep one occupant per cell (the first scattered in is deterministic and fine); a query reads at most nine representatives regardless of how full the cells are, so the work is O(targets) - linear even at fixed world (the reference held ~3x per 3x). The catch is that you have answered a slightly different question: “the nearest representative,” not “the nearest creature.” But both the kept and the dropped occupants of a cell sit inside the same cell, so the representative is within one cell-width of the true nearest - and the cell is already the resolution at which the grid knows position. Counting the mismatches, you find a large fraction differ under crowding yet none by more than a cell. The approximation is bounded by the grid you already chose; for “eat what you can reach,” that is free.
Two routes back to O(N), then, and they differ in kind: hold the density (grow the world with the population - a constraint on the simulation), or collapse the cell to a representative (a change to the query). The first keeps the exact nearest; the second trades a within-cell approximation for O(N) in a world that does not grow. Part II measures both on the simulator at scale.
29 - The wall at 10K → 1M
Concept node: see the DAG and glossary entry 29.
A simulator that runs cleanly at 10 000 creatures often grinds to a halt at 1 000 000. Not because the algorithm changed - because constant factors that were invisible at the smaller scale now bind.
This chapter is about finding the wall. The fixes are techniques you already have: narrower fields (§7), subscriptions (§26), working-set discipline (§27), spatial binning and locality (§28), pre-sized buffers, batched cleanup. The chapter’s job is to teach the reader to measure - to find which constant factors blew up.
Constant-factor bugs that bind at 10K → 1M:
- Reallocation. A
to_insert: Vec<CreatureRow>that grew lazily was fine at 100 pushes per tick (10K creatures × 1% reproduction). At 10K pushes per tick (1M × 1%), the reallocations dominate. Fix:Vec::with_capacity(estimated_max). - Linear scans.
hungry.iter().any(|&s| s == target)was 0.1 ms at 10K, but 10 ms at 1M. Fix: the sparse set (§23) - O(1) membership, no per-creature flag. - Cache spillover.
creatureworking set at 10K is 200 KB (L2-resident). At 1M it is 20 MB (L3-resident). Per-element time triples. Fix: narrower fields (§7) and the spatial compaction for locality (§28); for a system that touches only a subset, a subscription (§26). HashMapiteration order. AHashMap<u32, _>iterated by systems that need deterministic order. At 10K the cost was tolerable; at 1M the bandwidth cost is high. Fix:BTreeMaporVec<(K, V)>.- Per-tick allocation. A system that allocates a fresh
Vecper tick was fine when theVecwas 1 KB. At 1M it is 100 KB; allocation latency starts to matter. Fix: reuse buffers across ticks. - Logging. A
println!per creature was tolerable at 10K. At 1M it is the simulator’s bottleneck. Fix: buffered logging, periodic snapshots, or simply turn it off.
The pattern: any cost that was O(1) per creature, multiplied by 1M, is no longer free. Anything that was O(N) per tick at 10K is now O(N²)-equivalent in wall time. The fixes are local - each cost is a single-line change - but finding them requires measurement.
The right tool is a profiler. cargo flamegraph (or perf record + perf report) tells you where the time goes. The same simulator at 10K and 1M produces different flame graphs; the wall is the difference.
A useful exercise: run your simulator at 10K for 1000 ticks; time it. Run at 1M for 100 ticks (same total entity-ticks); time it. The 1M version should take ~10× longer, not 100×. If it takes 100×, something has crossed a constant-factor wall and the profiler will show you what.
The fix is structural. Apply the techniques: narrow fields, subscriptions, working set, spatial binning and locality, pre-sized buffers, batched cleanup, deterministic structures. Each is a chapter you have already read. The wall is the moment they all become non-optional.
Exercises
- Calibration. Run your simulator at N = 10K for 1000 ticks. Time it. Note the wall-clock total.
- Scale up. Run at N = 1M for 100 ticks (same total entity-ticks). Time it. Compute the ratio.
- Profile. Use
cargo flamegraph(orperf) on the 1M run. Identify the top three hottest functions. - Pre-size
to_insert. ApplyVec::with_capacityto your cleanup buffers. Re-run; re-profile. Did the hot list change? - Subscribe a subset system. Take a system that acts on a fraction of creatures (starvation, reproduction) and give it a slot-keyed subscription table (§26) instead of scanning all 1M and branching. Re-run; re-profile. The scan-all frame should drop off the flame graph; the system’s work falls in proportion to the subscribed fraction.
- Use index maps. Replace any linear
iter().any()with the §23id_to_slotlookup. Re-run; re-profile. - (stretch) Find one new wall. Pick any system in your simulator and find one constant factor that scales worse than expected. The fix is usually one of the techniques above; identifying which one is the lesson.
Reference notes in 29_wall_10k_to_1m_solutions.md.
What’s next
§30 - Moving beyond the wall takes the next step: when even your fastest, tightest, subscription-driven, compacted-for-locality simulator no longer fits in RAM, the architecture itself shifts.
Solutions: 29 - The wall at 10K → 1M
Exercise 1-2 - Calibration and scale-up
Run the simulator at 10K for 1000 ticks: typical wall-clock ~1-3 s.
Run at 1M for 100 ticks (same total entity-ticks): expect ~10-30 s if the simulator is well-tuned, ~100-300 s if it has unaddressed walls.
The ratio is the diagnostic. Anything above ~15× indicates that constant-factor walls are binding.
Exercise 3 - Profile
cargo flamegraph produces a flamegraph.svg. The wide frames at the top of the graph are the hottest functions. Common offenders at the 1M boundary:
<Vec as Extend>::extend- uncapped reallocationscore::iter::anyover aVec<u32>- linear scan that should be an indexed lookupstd::collections::HashMap::iter- non-deterministic, slow at scalecore::fmt::Write-println!in the hot path
Exercise 4 - Pre-size to_insert
#![allow(unused)]
fn main() {
let estimated_max = creatures.len() / 50; // 2% reproduction rate, with margin
let to_insert: Vec<CreatureRow> = Vec::with_capacity(estimated_max);
}Re-profile: the Vec::extend frames should shrink dramatically. A typical fix removes 5-15 % of total wall time.
Exercise 5 - Subscribe a subset system
Give a subset system (say apply_starve, which acts only on the hungry) a slot-keyed subscription table (§26) instead of scanning all 1M creatures and branching on a flag. Re-profile: the scan-all frame disappears from the flame graph, and the system’s cost falls in proportion to the subscribed fraction - at 1 % subscribed the ebp_partition benchmark shows roughly a 14x drop versus scan-all-and-branch. Motion, which touches every creature, gains nothing from a subscription; its lever is narrower fields (§7) and the spatial compaction (§28).
Exercise 6 - Index maps
Replace hungry.iter().any(|&s| s == target) with the sparse-set test hungry.is_member(target) (one array read and a sentinel check, §23). A function that was O(N) per call is now O(1), with no per-creature boolean.
For a system that asks the question 100K times per tick at 1M creatures, this is the difference between 100 s and 0.005 s per tick.
Exercise 7 - Find one new wall
Open-ended. Common discoveries the first time a reader runs this exercise:
- A
Vec<Box<T>>somewhere in the code, costing one allocation per element. - A
clone()inside a hot loop where a&would do. - A
String::from(...)in a logging path that runs millions of times. - A
HashMap::contains_keywhere aVec<bool>mask would be O(1) and 100× faster.
In each case, the fix is a one-line change once the wall is found. The challenge is finding the wall, not removing it.
30 - Moving beyond the wall
Concept node: see the DAG and glossary entry 30.
At 100 million creatures with 24 bytes of hot data each, the working set is 2.4 GB. At a billion, 24 GB. Most desktops have 16-64 GB of RAM. The simulator can no longer hold its world and its history and the OS and whatever else and operate at speed.
The fix is streaming: only the relevant slice of the world is in memory at any one time; the rest lives on disk and is read on demand.
The shape:
#![allow(unused)]
fn main() {
struct StreamingWorld {
in_memory: Window, // a small contiguous range of recent state
disk: Archive, // the rest, append-only on disk
}
}A window of recent state lives in memory, indexed for cheap query. Older state lives on disk in append-only chunks; it is read into the window when a query needs it.
This pattern shows up wherever this scale matters:
- Time-series databases (Prometheus, InfluxDB): recent metrics in RAM; older series compressed and disk-resident.
- Game replay systems: the last 30 seconds replayable from a memory ring; the full match streamed from a server.
- Event-sourced systems: recent state cached; the full event log on disk; replay reconstructs.
- Database write-ahead logs: append to log; flush to data files; the data files become disk-resident; recent log + memory hold the active set.
For the simulator, streaming entails three architectural shifts:
The log is the canonical state. The world’s tables are derivable from the log. If the log is complete and durable, every other in-memory representation is reconstructible. This is the structural framing of §37 - The log is the world: the log is not a record of state, it is the state.
Persistence is serialisation of tables. A snapshot is the world’s current SoA, written as a stream of (entity, key, value) triples - the same shape it has in memory. Recovery is reading the triples back. There is no separate domain model; serialisation is transposition, not translation. This is §36.
Storage is a cost like any other. Reading from disk costs bandwidth and IOPS, just as reading from RAM costs cache-line loads. Storage systems with bandwidth (bytes per second) and IOPS (operations per second) limits must be counted against the tick budget. SQLite, network sockets, distributed file systems - all are storage systems with their own cost profiles. This is §38.
Cleanup amortises the write cost. The cleanup system you built in §22 already batches in-memory mutations to avoid mid-tick races. At streaming scale, the same pattern earns its keep again, for a second reason: it batches disk writes. Without batching, 10 000 individual mutations per tick would mean 10 000 disk writes - at 100 µs per write, a full second of I/O per tick, far over budget. With cleanup, those 10 000 mutations become one durable batch per tick: a handful of disk pages flushed sequentially to the log. One syscall, one trip through the block layer, one (or a few) DMA transfers - versus 10 000 of each. The cost is amortised across the batch, not paid per row. The mechanics - page cache, vectored I/O, fsync semantics - belong to §38; the gradient is what matters here. The architecture you assembled in §22 was already the streaming architecture in miniature; this section just lets you spell it out at scale.
The simulator at streaming scale is no longer a process running in memory; it is a pipeline between a memory window and a durable log, with the systems running on whatever slice of the world is currently mounted. Every read might fault to disk; every write is buffered into the next cleanup’s batch.
The transition from in-memory to streaming is the largest architectural shift in the book. Below this wall, the simulator is a single-process program with its working state in RAM. Above it, the simulator is closer to a database with its working state on disk and a small in-memory hot path. The techniques are different; the discipline is the same - layout, working set, ownership, determinism - applied at a different scale.
This wall is where most projects either re-architect or quietly accept slower-than-target performance. The book points at the wall and names the techniques; it does not pretend the techniques are free.
Exercises
- Compute your streaming threshold. Estimate your simulator’s per-creature footprint at full SoA. Divide your machine’s RAM (the half you can spare for the simulator) by that footprint. The result is roughly the N at which the simulator hits the streaming wall.
- Predict the cost. A disk read is ~100 µs (NVMe SSD), ~200-500 µs (SATA SSD), or ~10 ms (spinning disk). At a 33 ms tick budget, how many disk reads can a tick afford? How many might a system want to make?
- Snapshot a small world. Write a function that serialises your simulator’s current state to a single file (one file, no schema gymnastics, just write the columns). Read it back into a fresh world. Confirm the simulator continues running indistinguishably.
- A windowed log. Implement an append-only log with a fixed in-memory window. Older entries go to disk; new entries always go to memory. Verify queries inside the window are fast; queries outside the window pay the disk cost.
- Log-as-world. With the windowed log from exercise 4, reconstruct creature state at an earlier tick by replaying the log over the most recent snapshot whose tick is ≤ the requested one. Compare query speed to the in-memory case.
- (stretch) Document your bound. Write down, for your simulator, the largest N you can run while staying inside a 33 ms tick budget. Include footprint, cache regime, and any disk-bound cost. Above this N, the simulator needs the streaming architecture.
Reference notes in 30_streaming_wall_solutions.md.
What’s next
You have closed Scale. The next phase is Concurrency, starting with §31 - Disjoint write-sets parallelize freely. The simulator is about to start running on more than one thread.
Solutions: 30 - The wall at 1M → streaming
Exercise 1 - Streaming threshold
Per-creature footprint at full SoA: hot ~24 B, cold ~16 B, plus presence flags ~8 B = ~48 B. Plus index maps and indices into derived tables: round to ~64 B per live creature.
For a desktop with 32 GB RAM, allocating 16 GB to the simulator: 16 × 10⁹ / 64 = 250 million creatures. Above ~250M, the simulator must start streaming.
In practice the threshold is lower because logs, snapshots, and OS overhead consume RAM too. A safe budget might be 50-100M before the streaming architecture is needed.
Exercise 2 - Disk read cost
NVMe SSD: ~100 µs per read. A 33 ms tick budget is 33 000 µs / 100 µs ≈ 330 random disk reads. If a system would naturally make 10 000 disk reads per tick, the simulator is roughly 30× slower than budget unless reads are batched or sequential.
The fix is the same as for cache misses at the smaller scale: amortise the cost. Read a page of consecutive entries (4 KB = 64 cache lines = many rows) at one IOPS cost; touch all of them while the cost is paid.
Exercise 3 - Snapshot
#![allow(unused)]
fn main() {
fn snapshot_world(world: &World, path: &Path) -> std::io::Result<()> {
let mut f = std::fs::File::create(path)?;
use std::io::Write;
let c = &world.creatures;
f.write_all(&c.len().to_le_bytes())?;
for &x in &c.px { f.write_all(&x.to_le_bytes())?; }
for &y in &c.py { f.write_all(&y.to_le_bytes())?; }
for &x in &c.vx { f.write_all(&x.to_le_bytes())?; }
for &y in &c.vy { f.write_all(&y.to_le_bytes())?; }
for &e in &c.energy { f.write_all(&e.to_le_bytes())?; }
for &i in &c.id { f.write_all(&i.to_le_bytes())?; }
Ok(())
}
fn load_world(path: &Path) -> std::io::Result<World> {
// Read the columns back in the same order. Sizes from the prefixed length.
todo!()
}
}After a snapshot + load round-trip, the simulator continues running indistinguishably if and only if the simulator is deterministic (§16). Determinism is the precondition for snapshot/load to mean what we expect.
Exercise 4 - Windowed log
#![allow(unused)]
fn main() {
struct WindowedLog<E> {
in_memory: std::collections::VecDeque<E>,
capacity: usize,
disk: std::fs::File,
}
impl<E: Encode> WindowedLog<E> {
fn push(&mut self, e: E) {
if self.in_memory.len() == self.capacity {
// Evict oldest to disk, append new in memory.
let oldest = self.in_memory.pop_front().unwrap();
oldest.encode(&mut self.disk).unwrap();
}
self.in_memory.push_back(e);
}
}
}Queries inside the in-memory window are O(1) per entry. Queries past the window pay one disk seek (~100 µs) plus a sequential read for the requested span. The cost difference is the streaming wall.
Exercise 5 - Log-as-world reconstruction
To recover state at tick T:
- Find the most recent snapshot at tick S ≤ T.
- Load the snapshot into a fresh world.
- Replay log entries from S to T in order.
Replay speed depends on the events-per-tick rate. For most simulators, replay is 10-100× faster than original-tick rate (no rendering, no I/O outside the log read). Reconstructing 1000 ticks of history takes ~1 second of replay time.
Exercise 6 - Document your bound
A well-tuned simulator at 30 Hz on a typical desktop:
- ~10 M creatures comfortable (RAM-resident, sub-budget).
- ~100 M creatures possible with narrow fields and the spatial compaction (RAM-resident, near-budget).
- ~1 B creatures requires streaming (working set exceeds RAM).
- ~10 B+ requires distributed simulation across multiple machines (covered in the monograph).
Each step is a different architecture, with the techniques in the previous step still applying. The book ends below the streaming wall; the monograph picks up above it.
31 - Disjoint write-sets parallelize freely
Concept node: see the DAG and glossary entry 31.
Two systems can run in parallel if and only if their write-sets do not overlap. That is the rule. It is small. It is what node 25’s single-writer ownership buys you.
Concretely: in the simulator’s tick, motion writes creature.pos and creature.energy; food_spawn writes food. Their write-sets are disjoint. They can run on two different threads with no coordination - no locks, no atomics, no message-passing. The data layout makes the parallelism free.
#![allow(unused)]
fn main() {
use std::thread;
thread::scope(|s| {
s.spawn(|| motion(&mut hot.px, &mut hot.py, &hot.vx, &hot.vy, &mut hot.energy, dt));
s.spawn(|| food_spawn(&food_spawner, &mut food));
});
// both threads have completed before scope() returns
}std::thread::scope is the Rust idiom that proves at compile time the two threads finish before the surrounding state is touched. The borrow checker enforces the disjoint-writes rule: if you tried to spawn two threads each holding &mut hot.px, the code would not compile.
The same shape works at finer grain. The simulator’s three appliers (apply_eat, apply_reproduce, apply_starve) all read pending_event and write disjoint things - apply_eat writes food, to_remove; apply_reproduce writes to_insert; apply_starve writes to_remove. Two of the three write the same table (to_remove). To parallelise them, give each its own segment of to_remove (one per thread), then merge at cleanup. The merge is Vec::extend_from_slice or equivalent - O(N) in the merged total, free relative to the work that produced it.
Three things this rule does for you:
No locks. A lock is a tax paid by every reader and writer of the locked thing. With single-writer ownership, locks are unnecessary; with disjoint write-sets, they remain unnecessary at the parallel boundary. The simulator at this scale has zero Mutex, zero RwLock, zero Atomic* in its inner systems.
Speedup is structural, not promised. N threads with disjoint work give N× speedup, modulo memory-bandwidth limits. That ceiling is real - at 50 GB/s of DDR5 bandwidth, eight threads cannot all do bandwidth-bound work in parallel; one thread saturates the bus. But for compute-bound work or for cache-resident loops, the speedup is close to N1.
Tools without ceremony. The Rust ecosystem’s standard parallelism crate is rayon, which provides par_iter and par_chunks_mut for parallel iteration. With disjoint writes by construction, rayon::join and par_iter_mut work without changing the simulator’s design - they are conveniences over std::thread::scope, not new architectures.
The single-writer rule (§25) was the precondition. Disjoint write-sets is the rule applied across systems. Together, parallelism becomes a scheduling decision, not a design decision.
Measurements
Two disjoint systems run under thread::scope hit close to the ideal 2x on every machine - the write-sets do not collide, so there is nothing to serialise. Full output: code/README.md.
| # | measurement | Ryzen 9 (modern) | i7-3610QM (2012) | i3-5010U (2015) | Pi 4 |
|---|---|---|---|---|---|
| 1 | thread::scope two-system speedup (compute-bound) | 1.96x | 1.92x | 1.81x | 1.99x |
Exercises
You will need a multi-core machine. Most desktops and laptops qualify.
- Two parallel systems. Wrap
motionandfood_spawninstd::thread::scope. Run a tick. Verify both completed and the world state is the expected combination. - Time the speedup. Run the same two systems serially. Run them in parallel via
thread::scope. Compare. Speedup should be close to 2× when both systems are individually expensive and compute-bound; less if one dominates or the work is bandwidth-bound. Measured 1.8-2.0× across the four reference machines (scope_speedup). - A failing case. Try to run
motionandapply_eatin parallel. Both writecreature.energy. Rust’s borrow checker rejects the code. Note the error message - that is the architecture being enforced by the compiler. rayon::join. Replacethread::scopewithrayon::join((|| motion(...), || food_spawn(...))). Confirm the same behaviour. Adding rayon toCargo.tomlis a §42 dependency-pricing decision in miniature: read what the crate gives you, decide consciously.- Per-thread segments. Split
to_removeinto 8 thread-localVec<u32>s. Run 8 threads ofapply_starve, each producing its own segment. Merge at the end. Verify the merge produces the same result as a single-threaded run. - (stretch) Find the bandwidth ceiling. Time motion at 1, 2, 4, 8 threads on a 1M-creature world. Plot speedup vs thread count. The plot is roughly linear up to the memory-bandwidth limit, then flat.
Reference notes in 31_disjoint_writes_parallelize_solutions.md.
What’s next
§32 - Partition, don’t lock takes the next step: when one system must write a single table from multiple threads, you split the table, not the access.
Solutions: 31 - Disjoint write-sets parallelize freely
Exercise 1 - Two parallel systems
#![allow(unused)]
fn main() {
std::thread::scope(|s| {
s.spawn(|| motion(&mut hot.px, &mut hot.py, &hot.vx, &hot.vy, &mut hot.energy, dt));
s.spawn(|| food_spawn(&food_spawner, &mut food));
});
}Both systems write disjoint tables. The borrow checker is satisfied; the threads cannot interfere. After the scope returns, both threads have finished and the world is consistent.
Exercise 2 - Time the speedup
At 1M creatures: motion alone ≈ 3 ms; food_spawn alone ≈ 0.1 ms. Serial total ≈ 3.1 ms. Parallel total ≈ 3 ms (food_spawn finishes first; motion dominates). Speedup is close to 1× because the workload is dominated by motion.
When both systems are individually expensive (e.g. food at 1M items as well), serial ≈ 6 ms, parallel ≈ 3.5 ms (memory bandwidth shared); speedup ≈ 1.7×.
Exercise 3 - A failing case
std::thread::scope(|s| {
s.spawn(|| motion(&mut hot.px, &mut hot.py, &hot.vx, &hot.vy, &mut hot.energy, dt));
s.spawn(|| apply_eat(&pending, &food, &mut hot.energy));
});Rust rejects:
error[E0524]: two closures require unique access to `hot.energy` at the same time
The architecture’s safety is the language’s safety. Compile-time, not run-time.
Exercise 4 - rayon::join
#![allow(unused)]
fn main() {
use rayon::join;
join(
|| motion(&mut hot.px, &mut hot.py, &hot.vx, &hot.vy, &mut hot.energy, dt),
|| food_spawn(&food_spawner, &mut food),
);
}Identical behaviour to thread::scope for two-system parallelism. rayon adds value at finer-grained parallelism (par_iter, work-stealing); for the simulator’s two-system pattern, join is sufficient.
Exercise 5 - Per-thread segments
#![allow(unused)]
fn main() {
const N: usize = 8;
let mut segments: Vec<Vec<u32>> = (0..N).map(|_| Vec::new()).collect();
let chunk = energy.len().div_ceil(N);
thread::scope(|s| {
for (t, segment) in segments.iter_mut().enumerate() {
let energy_chunk = &energy[t * chunk .. ((t+1) * chunk).min(energy.len())];
let ids_chunk = &ids[t * chunk .. ((t+1) * chunk).min(ids.len())];
s.spawn(move || apply_starve(energy_chunk, ids_chunk, segment));
}
});
let to_remove: Vec<u32> = segments.into_iter().flatten().collect();
}Each thread writes its own Vec<u32>. Merge at the end via flatten. The merge is O(total) - same cost as building the single-threaded vec, but distributed across threads.
Exercise 6 - Bandwidth ceiling
| threads | speedup |
|---|---|
| 1 | 1.0× |
| 2 | 1.8× |
| 4 | 3.2× |
| 8 | 4.5× |
Above 4-6 threads, memory bandwidth becomes the bottleneck. The 8-core ceiling is around 5×, not 8×, because all cores pull from the same memory bus. Compute-bound work scales further; bandwidth-bound work hits this ceiling.
For your machine, the ceiling depends on the memory controller’s throughput. DDR5-5600 dual-channel tops out around 60 GB/s sustained; eight cores doing 50 GB/s of bandwidth-bound work each would need 400 GB/s - they cannot.
32 - Partition, don’t lock
Concept node: see the DAG and glossary entry 32.
§31 said “disjoint write-sets parallelise freely”. What if the system has to write one table from many threads? Motion at 1M creatures wants to update creature.pos for every creature; the table is one. Eight threads, one table - looks like a lock case.
It is not. The fix is to partition the data, not to lock the access.
Each thread takes a slice of the table. Thread t writes slots t * N/8 .. (t+1) * N/8 and only those slots. The slices are disjoint by construction; no thread can write where another is writing. Inside each slice, a single thread is the writer - node 25’s ownership rule still holds, just at the slice level instead of the table level.
#![allow(unused)]
fn main() {
use std::thread;
thread::scope(|s| {
let chunk = pos.len().div_ceil(8);
let pos_chunks = pos.chunks_mut(chunk);
let vel_chunks = vel.chunks(chunk);
let energy_chunks = energy.chunks_mut(chunk);
for ((p, v), e) in pos_chunks.zip(vel_chunks).zip(energy_chunks) {
s.spawn(move || {
for i in 0..p.len() {
p[i].0 += v[i].0 * dt;
p[i].1 += v[i].1 * dt;
e[i] -= burn * dt;
}
});
}
});
}chunks_mut is the standard library’s splitter for &mut [T] into disjoint sub-slices. Each chunk is a &mut [T] with its own ownership; the borrow checker is satisfied. No Mutex, no atomic, no contention.
The choice of partitioning matters.
By entity range (above): simple, works when access is uniform. Each thread does the same work on a different slice.
By spatial cell (after the spatial compaction, §28): each thread takes a region of the world. Useful when interactions are local - neighbours-only collisions, regional behaviours. Threads at boundary cells need a small synchronisation step (or a halo region copied into each thread’s input).
By hash: each thread takes ids whose hash modulo N matches its thread number. Useful when access is uniform but you want stable thread-to-data mapping across ticks.
By workload weight: each thread takes a number of rows weighted by expected work per row. Useful when rows differ in cost (e.g. some creatures have many neighbours, others have none). Requires a profiling pass or a heuristic.
The partition shape is the design choice; the partition mechanism (slicing) is trivial in Rust.
A subtlety: even with partitioning, false sharing (next section) can wreck the performance gains. If two threads write adjacent fields in the same cache line, the hardware coherency protocol forces them to take turns despite the logical independence. The fix is alignment, padding, or partitioning at cache-line boundaries - §33 develops it.
The pattern is the right answer to “but I have one big table”. You almost never need a lock; you need a partition.
Exercises
- Partition motion. Use
chunks_mutto splitpos,vel, andenergyinto 8 chunks. Run motion across 8thread::scopethreads. Compare to single-threaded. - Speedup at scale. Time partitioned motion at N = 100K, 1M, 10M creatures with 1, 2, 4, 8 threads. Plot speedup. Note where the bandwidth ceiling kicks in.
- Spatial partition. After running §28’s spatial compaction, partition by spatial region (e.g. 8 vertical stripes of the world). Each thread handles one stripe. Compare with the entity-range partition. Does the spatial version pay off for
next_event? - Workload-weighted partition. Suppose 90 % of creatures are idle and 10 % are active. A naive partition gives most threads almost no work and one thread all the work. Implement a partition that balances active count, not total count. Time both.
- (stretch)
rayon::par_chunks_mut. Replace your manualthread::scope+chunks_mutwithpos.par_chunks_mut(chunk_size). Same result, less code. Note that rayon’s work-stealing scheduler internally rebalances unbalanced workloads.
Reference notes in 32_partition_dont_lock_solutions.md.
What’s next
§33 - False sharing names the hardware-level pitfall that can sink the partition pattern: two threads writing different fields in the same cache line slow each other down despite logical independence.
Solutions: 32 - Partition, don’t lock
Exercise 1 - Partition motion
#![allow(unused)]
fn main() {
use std::thread;
const N_THREADS: usize = 8;
let chunk = pos.len().div_ceil(N_THREADS);
thread::scope(|s| {
for ((p, v), e) in pos.chunks_mut(chunk)
.zip(vel.chunks(chunk))
.zip(energy.chunks_mut(chunk))
{
s.spawn(move || {
for i in 0..p.len() {
p[i].0 += v[i].0 * dt;
p[i].1 += v[i].1 * dt;
e[i] -= burn * dt;
}
});
}
});
}chunks_mut is the standard library’s slice splitter. Each thread receives its own &mut [T]; the borrow checker is satisfied; no Mutex is required.
Exercise 2 - Speedup at scale
| N | 1 thread | 4 threads | 8 threads |
|---|---|---|---|
| 100 K | 0.3 ms | 0.10 ms | 0.08 ms |
| 1 M | 3.0 ms | 0.9 ms | 0.6 ms |
| 10 M | 30 ms | 12 ms | 12 ms |
At 10M, the working set is 200 MB, well past L3. The loop is memory-bandwidth bound; adding threads stops helping past 4 cores. At 1M (in L3), 8 threads gives ≈ 5× speedup.
Exercise 3 - Spatial partition
After §28’s spatial compaction, creatures in the same region are adjacent in memory. Assigning each thread a region means the cache lines a thread loads are the cache lines that thread uses - no cross-thread cache traffic.
For systems with neighbour reads (next_event’s collision check), spatial partitioning is roughly 10-30 % faster than entity-range partitioning at scale, depending on neighbour density.
Exercise 4 - Workload-weighted partition
A naive partition with 1M creatures and 100K active gives some threads all the work and others none. A weighted partition divides the active set:
#![allow(unused)]
fn main() {
let active: Vec<u32> = /* ids of active creatures */;
let active_per_thread = active.len().div_ceil(N_THREADS);
thread::scope(|s| {
for chunk in active.chunks(active_per_thread) {
s.spawn(move || drive_active(chunk, /* ... */));
}
});
}Each thread gets ≈ 12 500 active creatures. Cost-per-thread is balanced; total time ≈ total_active_work / N_THREADS. The naive version would have one thread doing all the active work → speedup ≈ 1×.
Exercise 5 - rayon::par_chunks_mut
#![allow(unused)]
fn main() {
use rayon::prelude::*;
pos.par_chunks_mut(chunk_size)
.zip(vel.par_chunks(chunk_size))
.zip(energy.par_chunks_mut(chunk_size))
.for_each(|((p, v), e)| {
for i in 0..p.len() {
p[i].0 += v[i].0 * dt;
p[i].1 += v[i].1 * dt;
e[i] -= burn * dt;
}
});
}Rayon’s work-stealing scheduler handles unbalanced workloads automatically: a thread that finishes its chunk early steals work from a slower thread. For uniform work, performance matches manual chunks_mut; for unbalanced work, it can outperform.
The dependency cost: rayon brings in a small ecosystem (~50 KB binary impact, a global thread pool, a few transitive crates). For most simulators this is a clear win; for embedded targets or fully reproducible builds it may not be. The §41 from-scratch rule applies: write the manual thread::scope version first, then decide.
33 - False sharing
Concept node: see the DAG and glossary entry 33.
You partitioned the table. Each thread folds its own disjoint slice into its own accumulator. The work is balanced. The speedup is… 0.4× - the parallel version runs slower than a single thread (measured 0.26-0.42× across the four reference machines)1. Where did the parallelism go?
Probably to false sharing.
The CPU cache works on 64-byte cache lines. When a thread writes to address X, the cache controller invalidates that line everywhere else - every other CPU’s cache must throw away its copy and reload. If two threads are writing to different addresses but in the same cache line, every write triggers an invalidation on the other thread’s cache. The threads slow each other down without ever logically conflicting.
A pathological case: eight threads each incrementing one entry in [u64; 8]. The array is exactly 64 bytes - one cache line. All eight threads write to that line. Every write invalidates the other seven caches. The threads run slower together than one thread alone - true negative scaling.
The fix is to put each thread’s data on its own cache line. Either pad the underlying value:
#![allow(unused)]
fn main() {
#[repr(align(64))]
struct CachePadded(u64);
let counters: [CachePadded; 8] = std::array::from_fn(|_| CachePadded(0));
}Or split into separate allocations (each Vec lives in its own heap region, normally far apart). Or use thread-local storage. Or partition at cache-line granularity from the start.
The Rust idiom for the padding pattern is crossbeam_utils::CachePadded<T> from the crossbeam-utils crate, which exists for exactly this case.
False sharing is a hardware concern, not a Rust concern. The borrow checker sees no problem with eight &mut u64 references at disjoint addresses; the hardware sees one cache line and serialises the access. The bug is invisible at the language level. It shows up only as performance - the parallel version is mysteriously slow.
How to find it. Profile with perf stat -e cache-misses (or its equivalent on your platform). False sharing produces high cache-misses despite supposedly disjoint writes. If profiling shows your parallel system has surprisingly high cache traffic, false sharing is a likely cause.
How to avoid it without painful debugging. Make per-thread data structurally separate from the start. Each thread gets its own Vec<T> (separate allocation, separate cache lines). Merge at the end (§31’s pattern for to_remove with per-thread segments). The merge is cheap; the false-sharing avoidance is structural.
The takeaway: physical layout matters even for logically disjoint data. Two &muts pointing at different addresses do not parallelise freely if those addresses are within 64 bytes. The fix is alignment or separation. The detection is profiling.
Line size is not always 64 bytes
64 bytes is the size on the hardware this book measures, but it is not universal. The false-sharing unit by architecture, separated into what the book has run on versus what it cites:
| Architecture | Cache line | Measured | Note |
|---|---|---|---|
| x86-64 (modern Intel/AMD) | 64 B | Y | 1 |
| ARM Cortex-A | 64 B | Y | 2 |
| ARM64 Neoverse (server) | 64 B | N | |
| RISC-V | 64 B | N | 3 |
| Apple Silicon (M1-M4) | 128 B | N | |
| IBM POWER (POWER7-POWER10) | 128 B | N | |
| IBM z/Architecture (s390x) | 256 B | N |
- Measured on the i7 / NUC / Ryzen boxes. Intel’s adjacent-line prefetch can make the effective unit 128 B - pad to 128 to avoid false sharing.
- Measured on a Raspberry Pi 4 (Cortex-A72). Runtime query:
CTR_EL0. - Implementation-defined; not fixed by the ISA.
Cache lines have grown with the hardware: 32 bytes on pre-Pentium-4 x86 and many embedded cores, 64 across most of today’s desktops and phones, 128 on Apple Silicon and POWER, 256 on IBM Z. This book assumes 64 and pads to 128 where false sharing demands it; on anything else, query the line size rather than trust the default: getconf LEVEL1_DCACHE_LINESIZE, sysconf(_SC_LEVEL1_DCACHE_LINESIZE), or /sys/devices/system/cpu/cpu0/cache/index0/coherency_line_size. The coherency granule can differ from the fetch line; the coherency unit is what governs false sharing.
If you have one of the unmeasured machines and run the suite, send the numbers and they go in.
Measurements
Below 1.0 means the “parallel” run is slower than a single thread - real negative scaling from false sharing. The partitioned-reduction row is the realistic case (disjoint input slices, a packed per-thread accumulator); padding each accumulator to its own cache line recovers the speedup. Full output: code/README.md.
| # | measurement | Ryzen 9 (modern) | i7-3610QM (2012) | i3-5010U (2015) | Pi 4 |
|---|---|---|---|---|---|
| 1 | shared [u64;N] parallel ÷ 1 thread | 0.37x | 0.43x | 0.30x | 0.27x |
| 2 | partitioned reduction (packed) ÷ 1 thread | 0.38x | 0.42x | 0.30x | 0.26x |
| 3 | padded ÷ shared (speedup recovered) | 21.1x | 8.3x | 6.3x | 13.6x |
Exercises
- The pathological counter. Build the 8-thread case with eight
AtomicU64in one cache line:
Time the parallel version against a single-threaded loop doing the same total work. The parallel version should be slower - true negative scaling.#![allow(unused)] fn main() { use std::sync::atomic::{AtomicU64, Ordering}; let counters: [AtomicU64; 8] = std::array::from_fn(|_| AtomicU64::new(0)); // ... 8 threads, each incrementing counters[t] in a tight loop } - The padded version. Pad each counter to its own cache line via
#[repr(align(64))]. Re-run. The parallel version should now scale near-linearly with thread count. - A real example. In your simulator’s per-thread
to_removesegments (§31 exercise 5), check whether the thread-localVec<u32>allocations might land in the same cache line. They normally should not - separateVecs have their data on the heap, which the allocator distributes - but if performance is unexpectedly poor, this is one place to look. - Adjacent struct fields. Build a struct with two
u64fields. Spawn two threads, one writing each field. They are at adjacent addresses, same cache line. Time vs. twou64in separate allocations. - (stretch) Find your cache-line size.
getconf LEVEL1_DCACHE_LINESIZEon Linux. Verify it is 64. Some chips use 128-byte lines (especially Apple Silicon at certain levels); if you are on one,#[repr(align(64))]is not enough - you need 128.
Reference notes in 33_false_sharing_solutions.md.
What’s next
§34 - Order is the contract ties parallelism back to the determinism rule from §16: parallelism is allowed inside a step, never across steps.
Solutions: 33 - False sharing
Exercise 1 - The pathological counter
#![allow(unused)]
fn main() {
use std::sync::atomic::{AtomicU64, Ordering};
use std::thread;
use std::time::Instant;
const ITERS: u64 = 10_000_000;
let counters: [AtomicU64; 8] = std::array::from_fn(|_| AtomicU64::new(0));
let t = Instant::now();
thread::scope(|s| {
for c in counters.iter() {
s.spawn(|| {
for _ in 0..ITERS {
c.fetch_add(1, Ordering::Relaxed);
}
});
}
});
println!("8 threads on one cache line: {:?}", t.elapsed());
}Compare with a single-threaded loop doing 8 × ITERS increments on a single counter. On most chips the single-threaded version is faster than the 8-thread version. True negative scaling.
Exercise 2 - The padded version
#![allow(unused)]
fn main() {
#[repr(align(64))]
struct Padded(AtomicU64);
let counters: [Padded; 8] = std::array::from_fn(|_| Padded(AtomicU64::new(0)));
}Each Padded occupies a full cache line. The 8 padded counters span 8 cache lines. Re-time the parallel loop. It should now scale near-linearly - typically 6-8× faster than single-threaded.
Exercise 3 - Per-thread to_remove
The data inside each thread’s Vec<u32> lives on the heap, in regions the allocator distributes to be far apart (typically separated by at least one page = 4 KB). False sharing on the data is unlikely.
The Vec headers (the (ptr, len, cap) fields, 24 bytes each on 64-bit), if stored adjacent in a parent struct or array, can share a cache line. If you observe poor scaling, padding the parent struct fixes it:
#![allow(unused)]
fn main() {
#[repr(align(64))]
struct ThreadLocalVec(Vec<u32>);
let segments: [ThreadLocalVec; 8] = std::array::from_fn(|_| ThreadLocalVec(Vec::new()));
}Exercise 4 - Adjacent struct fields
#![allow(unused)]
fn main() {
struct TwoCounters { a: AtomicU64, b: AtomicU64 } // 16 bytes, one cache line
let counters = TwoCounters { a: AtomicU64::new(0), b: AtomicU64::new(0) };
thread::scope(|s| {
s.spawn(|| {
for _ in 0..ITERS { counters.a.fetch_add(1, Ordering::Relaxed); }
});
s.spawn(|| {
for _ in 0..ITERS { counters.b.fetch_add(1, Ordering::Relaxed); }
});
});
}Two threads, separate fields, same cache line. Performance is similar to two threads contending on one field - the line is invalidated on every write either way.
Fix: pad each field to its own cache line.
#![allow(unused)]
fn main() {
#[repr(align(64))]
struct PaddedAtomic(AtomicU64);
struct TwoCounters { a: PaddedAtomic, b: PaddedAtomic } // 128 bytes, two lines
}Exercise 5 - Find your cache-line size
$ getconf LEVEL1_DCACHE_LINESIZE
64
x86 and most ARM Cortex-A: 64 bytes. Apple Silicon: 128 bytes for some cache levels. AArch64: variable; 64 or 128 depending on the chip. If padding to 64 bytes does not eliminate false sharing on a particular chip, try 128.
crossbeam_utils::CachePadded<T> checks the platform at compile time and pads to 128 on platforms that need it. For portable code, use it instead of hardcoded #[repr(align(64))].
34 - Order is the contract
Concept node: see the DAG and glossary entry 34.
§31, §32, and §33 unlocked parallelism. The natural temptation is to run everything in parallel - let the OS scheduler decide which system runs when, fan systems out across all available cores, push throughput up. This is wrong.
The system DAG (§14) is the contract for the simulator’s behaviour. Two systems with overlapping write-sets must run in a defined order. Two systems on the same DAG level may run in parallel - but they must both complete before any system that reads their outputs begins. Parallelism is allowed inside a step; it is never allowed across steps.
The reason is determinism (§16). Same inputs + same system order = same outputs. If apply_eat, apply_reproduce, and apply_starve run in undefined order - say, the first one to finish gets to write to_remove first - then cleanup sees a different to_remove ordering on different runs, and the world state at the end of the tick is non-reproducible. Replay breaks. Tests become flaky. Distributed simulation drifts apart.
The schedule looks like:
┌── apply_eat ──┐
│ │
next_event ────┼── apply_repro ┼─→ cleanup → inspect
│ │
└── apply_starve┘
next_event runs first (its writes are needed by all three appliers). The three appliers run in parallel - their writes are disjoint (or partitioned into thread-local segments, §31). cleanup runs after all three finish, never before any of them. inspect runs last.
The schedule is fixed by the DAG. Parallelism happens within the structure the DAG permits, not around it.
Two specific anti-patterns to avoid:
The “let the OS decide” anti-pattern. Spawning every system as a thread and letting them race is fast in the wrong way. Some runs will produce one result; some will produce another. The bug is intermittent, the cause is hard to find, and “fixing” it with locks reintroduces the costs §31-§33 worked to avoid.
The “early start” anti-pattern. Starting a system before its prerequisites have finished - even if the data “looks ready” - is a bet that the schedule will not change. The bet often pays off in practice, until the day a buffer fills slightly later than usual and the world’s state shifts in ways no test caught. Wait for the explicit completion of every prerequisite.
The discipline is enforced by a scheduler. A scheduler executes systems in topological order, parallelising those at the same DAG level, joining at every level boundary. Most production ECS engines (Bevy’s World::run_schedule, Unity DOTS’s JobHandle.Complete) implement exactly this. The pattern is the same as a parallel make: build dependencies in order, build independents in parallel, never start before prerequisites have finished.
A useful test: can you replay a tick to bit-identical output? If yes, your scheduler respects the contract. If no, it does not - somewhere a system runs in undefined order, and the bug will surface in the worst possible debugging window.
This rule closes Concurrency. The simulator can now use every core on the machine without sacrificing the determinism that §16 guaranteed. The DAG is both the parallel schedule and the deterministic execution order; one document, two readings.
Exercises
- Build the schedule. Write a
tick()that runsnext_event, then a parallel block of the three appliers (usingthread::scopeplus per-threadto_removesegments), thencleanup, theninspect. Verify the boundaries:cleanupmust not start before all three appliers complete. - Test for determinism. Run the simulator twice with the same seed. Hash the world after 100 ticks. The hashes must be identical even though the appliers ran in parallel.
- Break the contract. Construct a schedule where
cleanupstarts beforeapply_starvefinishes (e.g. via anunsafeshared buffer). Run twice. Hashes should differ - sometimes. The bug’s intermittency is the lesson. - Find your level boundaries. Sketch your simulator’s full DAG. Identify each level (set of systems with no transitive dependency on each other). Each level is a parallel batch; each boundary is a sync.
- (stretch) A minimal scheduler. Write a function that takes a list of
(name, read_set, write_set)and produces aVec<Vec<&str>>- the systems grouped by level. The scheduler is just a topological sort plus level grouping. Around 50 lines of Rust.
Reference notes in 34_order_is_the_contract_solutions.md.
What’s next
You have closed Concurrency. The simulator now runs on multiple cores without losing determinism. The next phase is I/O & persistence, starting with §35 - The boundary is the queue. The simulator is about to begin talking to the world outside its tick.
Solutions: 34 - Order is the contract
Exercise 1 - Build the schedule
#![allow(unused)]
fn main() {
fn tick(world: &mut World, dt: f32) {
next_event(&world.creatures.px, &world.creatures.py, &world.food, &mut world.pending);
// Per-thread to_remove segments to avoid the appliers' shared write.
let mut seg_eat: Vec<u32> = Vec::new();
let mut seg_repro: Vec<CreatureRow> = Vec::new();
let mut seg_starve: Vec<u32> = Vec::new();
thread::scope(|s| {
s.spawn(|| apply_eat(&world.pending, &world.food, &mut seg_eat, /* energy partition */));
s.spawn(|| apply_reproduce(&world.pending, &world.creatures.energy, &mut seg_repro));
s.spawn(|| apply_starve(&world.pending, &world.creatures.id, &mut seg_starve));
});
// All three appliers have completed before this line.
world.to_remove.extend(seg_eat);
world.to_remove.extend(seg_starve);
world.to_insert.extend(seg_repro);
cleanup(world);
inspect(world);
}
}The three appliers run in parallel; their write-sets are made disjoint by per-thread segments. cleanup runs after the scope returns, never before.
Exercise 2 - Test for determinism
#![allow(unused)]
fn main() {
let mut w1 = init_world(0xCAFE);
let mut w2 = init_world(0xCAFE);
for _ in 0..100 { tick(&mut w1, 0.033); }
for _ in 0..100 { tick(&mut w2, 0.033); }
assert_eq!(hash_world(&w1), hash_world(&w2));
}If the parallel boundaries are correct, the hashes match. The merge of seg_eat, seg_starve, and seg_repro happens in the same order on both runs (the extend calls are sequential after the scope), so to_remove and to_insert end up identical between runs.
Exercise 3 - Break the contract
thread::scope(|s| {
s.spawn(|| apply_eat(&world.pending, &world.food, &mut seg_eat, /* ... */));
s.spawn(|| apply_reproduce(&world.pending, &world.creatures.energy, &mut seg_repro));
s.spawn(|| apply_starve(&world.pending, &world.creatures.id, &mut seg_starve));
s.spawn(|| cleanup(world)); // running concurrently with appliers
});If you sidestep the borrow checker (e.g. via unsafe shared pointers), cleanup may start before the appliers have written seg_*. The two runs of the simulator produce different hashes - sometimes. Sometimes the same. The bug’s intermittency is the lesson; intermittent bugs are the worst kind to debug, and the contract exists to prevent them.
Exercise 4 - Level boundaries
For the simulator:
| level | systems | reads | writes |
|---|---|---|---|
| 0 | food_spawn | food_spawner | food |
| 1 | motion | pos, vel, energy, food | pos, energy |
| 2 | next_event | pos, food | pending |
| 3 | apply_eat, apply_reproduce, apply_starve | pending | thread-local segments |
| 4 | cleanup | segments | creatures, food |
| 5 | inspect | everything | (nothing) |
Six levels. Within each level, parallelism. Between levels, sync. Total throughput is bounded by the slowest level’s longest system.
Exercise 5 - A minimal scheduler
#![allow(unused)]
fn main() {
use std::collections::HashMap;
struct SystemDecl {
name: &'static str,
reads: Vec<&'static str>,
writes: Vec<&'static str>,
}
fn schedule<'a>(systems: &'a [SystemDecl]) -> Vec<Vec<&'a str>> {
let mut levels: Vec<Vec<&str>> = Vec::new();
let mut placed: HashMap<&str, usize> = HashMap::new();
for s in systems {
// The earliest level we can run is one after every system that
// wrote a table we read.
let mut my_level = 0;
for sr in &s.reads {
for prior in systems.iter().filter(|p| p.writes.iter().any(|w| w == sr)) {
if let Some(&l) = placed.get(prior.name) {
my_level = my_level.max(l + 1);
}
}
}
if levels.len() <= my_level {
levels.resize(my_level + 1, Vec::new());
}
levels[my_level].push(s.name);
placed.insert(s.name, my_level);
}
levels
}
}Around 30 lines. Topological sort + level grouping. Real schedulers add work-stealing, priority, GPU dispatch, dynamic re-balancing - but the core contract enforcement is exactly this. If your scheduler produces the right Vec<Vec<&str>>, you have a correct parallel ECS executor.
35 - The boundary is the queue
Concept node: see the DAG and glossary entry 35.
The simulator is a pure function. Given the world at tick start (world_t) and the inputs that arrived during the tick (inputs_t), it produces the world at tick end (world_t+1) and the outputs that should leave (outputs_t). Between those endpoints, no system touches the outside world. No system reads Instant::now(), sends a packet, writes to disk, or prints to stdout. Inside, the simulator is a transformation. Outside, it is a queue.
┌─────────────────────────────┐
│ Simulator (pure) │
│ ┌──────────────────────┐ │
│ │ systems run │ │
│ │ on world_t state │ │
│ └──────────────────────┘ │
│ ↑ ↓ │
│ inputs_t outputs_t│
└─────↑──────────────────↓────┘
│ │
┌─────────┐ ┌─────────┐
│ in queue│ │out queue│
└─────────┘ └─────────┘
↑ ↓
environment environment
Inputs arrive on the in-queue: events with timestamps, food-spawn requests from the policy, network packets in a multiplayer simulator, user input events. They wait in the queue until the next tick consumes them.
Outputs leave on the out-queue: state-change events for the log (eaten, born, dead), rendering data for the visualiser, packets for peers, replication updates for distributed nodes. They wait in the queue after the tick produces them, until the storage system or transport layer ships them.
What happens inside the boundary: pure transformation. Systems read from inputs_t (which is just another table by the time the systems start), update the world’s tables, queue mutations to to_remove/to_insert, and write to outputs_t (also just a table). No Instant::now(). No println!. No File::open. No TcpStream::connect. The inside is reproducible by construction; the outside is unpredictable, and the queue is the seam.
Why this matters:
Determinism. §16’s rule (same inputs + same order = same outputs) holds only if “inputs” is a complete description of the tick’s environment. The queue is that complete description. Any system reading from outside the queue is a source of non-determinism the queue cannot capture.
Replay. Record the in-queue. Replay the tick from world_t with the recorded queue. Get bit-identical world_t+1. The queue is what makes replay possible.
Testability. A test fills the in-queue with a synthetic input, runs one tick, asserts on the out-queue. The test does not need to mock File, TcpStream, or the system clock; the queue interface is the only thing the simulator sees.
Distribution. A distributed simulator with multiple nodes communicates via queues - each node’s out-queue feeds another node’s in-queue. The queue interface is the same on a single machine and across a network. The simulator’s design does not change.
Auditability. Every input that ever reached the simulator is in the in-queue’s history. Every output is in the out-queue’s history. The simulator’s full external interface is two append-only logs.
The cleanup pattern from §22 was the boundary at tick scope (mutations buffer, apply at boundary). The queue pattern at this scope is the same idea at run scope (I/O buffers, apply at the seam). The two compose: cleanup makes the tick atomic; the queue makes the run reproducible.
A useful test: can you run two simulators side-by-side from the same in-queue and get identical out-queues? If yes, the boundary holds. If no, somewhere a system reads the environment directly.
Exercises
- Build the queues. Add
in_queue: Vec<InputEvent>andout_queue: Vec<OutputEvent>to your simulator. Both fill at tick boundaries. - Refactor a system that reads time. Find any system that uses
Instant::now()directly. Refactor: takecurrent_timeas a parameter. The caller (the tick driver) readsInstant::now()once and passes it down. The system itself is now deterministic. - Refactor a system that prints. Find any system that calls
println!. Refactor: push the message toout_queueinstead. The caller reads the queue after the tick and writes whatever’s there. Logging is now deterministic; tests can assert on the queue. - Replay test. Save the in-queue across a 100-tick run. Run the simulator a second time from the initial world state with the saved queue. Hash both worlds. They must match.
- Two simulators from one queue. Run two simulators in parallel (or sequentially), feeding both from the same in-queue. After 100 ticks, hash both worlds. They must match. If they do not, somewhere a system reads from outside the queue.
- (stretch) Audit a real simulator. Open any open-source simulator’s tick function. Find every place it reads from the environment (clock, file, network, env vars). Each is a place where determinism leaks; each could be queue-ified.
Reference notes in 35_boundary_is_the_queue_solutions.md.
What’s next
§36 - Persistence is table serialization takes the next step: when the simulator pauses and resumes, persistence is just writing the columns and reading them back. No translation, no impedance mismatch.
Solutions: 35 - The boundary is the queue
Exercise 1 - Build the queues
#![allow(unused)]
fn main() {
struct InputEvent { tick: u64, kind: u8, payload: u64 }
struct OutputEvent { tick: u64, kind: u8, payload: u64 }
struct World {
// ... tables ...
in_queue: Vec<InputEvent>,
out_queue: Vec<OutputEvent>,
}
fn tick(world: &mut World, current_time: f64) {
let inputs: Vec<_> = world.in_queue.drain(..).collect();
// pure transformation - no other I/O
next_event(/* ... */);
motion(/* ... */, current_time);
// ... etc; outputs accumulated into world.out_queue
}
}The two queues are the boundary. Inputs arrive via in_queue.push(). Outputs leave via out_queue.drain(). Inside the tick, only the inputs and outputs cross the seam.
Exercise 2 - Refactor Instant::now()
Before: every system that needs time calls Instant::now() directly. Multiple systems → multiple non-deterministic readings.
After: the tick driver reads Instant::now() once, computes current_time: f64, passes it to every system as a parameter. The systems are pure functions of their inputs.
#![allow(unused)]
fn main() {
let now = Instant::now();
let current_time = (now - sim_start).as_secs_f64();
tick(&mut world, current_time);
}Replay can substitute a recorded current_time instead of reading the wall clock. The simulator’s behaviour is identical.
Exercise 3 - Refactor println!
Before:
fn apply_starve(...) {
if energy[i] <= 0.0 {
println!("creature {} starved", id[i]);
}
}After:
#![allow(unused)]
fn main() {
fn apply_starve(..., out: &mut Vec<OutputEvent>) {
if energy[i] <= 0.0 {
out.push(OutputEvent { tick, kind: STARVED, payload: id[i] as u64 });
}
}
}The system pushes to out_queue instead of writing stdout. The tick driver reads the queue after the tick and prints whatever is there. Logging is now deterministic; tests assert on the queue.
Exercise 4 - Replay test
#![allow(unused)]
fn main() {
let saved_inputs: Vec<Vec<InputEvent>> = run_and_record(&mut world1, 100);
let mut world2 = init_world(seed);
for inputs in saved_inputs {
world2.in_queue.extend(inputs);
tick(&mut world2, /* recorded current_time */);
}
assert_eq!(hash_world(&world1), hash_world(&world2));
}If the boundary is respected, world2 after replay matches world1 after the live run. If they differ, somewhere a system reads outside the queue.
Exercise 5 - Two simulators from one queue
Same structure as exercise 4, but feed two simulators (in parallel or sequentially) from the same recorded inputs. Hash both worlds at tick 100. They must match. If they don’t, the difference traces back to one (or more) system reading outside the queue.
Exercise 6 - Audit a real simulator
Common findings in production code:
tokio::time::Instant::now()inside a request handler - pulls wall time into the per-request transform.tracing::info!with side-effecting log macros - couples the system to the tracing infrastructure.tokio::fs::File::openreads - couples the system to the filesystem.env::varcalls - couples the system to the OS environment.rand::thread_rng()- pulls non-deterministic randomness into the per-tick transform.
Each is a place where determinism leaks. Each could be queue-ified.
36 - Persistence is table serialization
Concept node: see the DAG and glossary entry 36.
The simulator pauses. The world is in memory: the creatures columns (px, py, vx, vy, energy, birth_t, id, generation), a food table, presence tables (hungry, dead, etc.), the index map (id_to_slot), and the cleanup buffers. To pause durably, all of this must be written to disk; to resume, all of this must be read back.
The instinct the OOP world brings: design a “persistence format” with a schema, marshalling logic, version handling, and a translation layer between in-memory objects and on-disk records. This is wrong on the data-oriented side. There is no translation. There is only transposition.
A snapshot is the columns, written sequentially. A recovery is the columns, read sequentially. The on-disk format is the same shape as memory.
#![allow(unused)]
fn main() {
fn snapshot(world: &World, path: &Path) -> std::io::Result<()> {
use std::io::Write;
let mut f = std::fs::File::create(path)?;
// Header: tick, schema version.
f.write_all(&world.tick.to_le_bytes())?;
f.write_all(&SCHEMA_VERSION.to_le_bytes())?;
// Each column: [length: u32][raw bytes...]
write_column(&mut f, &world.creatures.px)?;
write_column(&mut f, &world.creatures.py)?;
write_column(&mut f, &world.creatures.vx)?;
write_column(&mut f, &world.creatures.vy)?;
write_column(&mut f, &world.creatures.energy)?;
write_column(&mut f, &world.creatures.birth_t)?;
write_column(&mut f, &world.creatures.id)?;
write_column(&mut f, &world.creatures.generation)?;
// Presence tables: same shape, append.
write_column(&mut f, &world.hungry)?;
// ... etc.
Ok(())
}
}Recovery is the inverse: read the bytes back into Vecs. No type conversion, no field mapping, no schema discrimination at the row level. The file is exactly what the memory was; the memory is exactly what the file is.
The savings are concrete:
No schema design. The schema is whatever the columns are. Schema documentation is the column declarations.
No object marshalling. No serialize() per row, no deserialize() per row. The Vec is written as bytes; bytes are read as a Vec. At 1M creatures × 24 bytes hot, the snapshot is 24 MB; writing it is one bulk write - ~5-10 ms on NVMe.
No translation bugs. ORMs are a famous source of subtle correctness issues - fields renamed, types coerced, edge cases mishandled. Here, the in-memory and on-disk forms are bit-identical; the load is read_bytes_into_vec and that is all.
Deterministic recovery. A snapshot taken in a deterministic simulator round-trips exactly. The hashed world after snapshot → load is identical to the hashed world before.
What it does not save you from:
Platform versioning. Three things can break a snapshot across environments: the schema changed (you added a column or renamed a type), the byte order differs (you saved on a little-endian machine and loaded on a big-endian one), or the OS conventions differ (line endings, native type widths, path conventions in any string fields). All three have the same fix. Write a small header into every snapshot - schema version, endianness, OS - and at load time, if any field differs from the current platform’s value, run the matching migration. The migrations are one-directional (newer code reads older snapshots, x86 code reads big-endian snapshots, Linux code reads macOS snapshots) and they are the only translations in the system. Most simulators target a single architecture and OS, write the header fields anyway, and skip the migrations until they are needed; the mechanism is there from day one, the cost is the bytes for the header.
Compression. Raw bytes are rarely compact at runtime - many fields are sparse or small, and compression is sometimes worth a few milliseconds at snapshot time to save tens of milliseconds on the disk side. Apply only after measurement.
The pattern shows up everywhere this scale matters. Write-ahead logs in databases, save-game files in games, checkpoint files in HPC, frame snapshots in video editing. They all dodge the ORM trap by writing the columns directly.
The §0/§1 simulator’s snapshot is roughly twenty-five lines of Rust per direction. The OOP equivalent - define a CreatureRecord, derive Serialize/Deserialize, walk the world serialising one creature at a time - is ten times the code, slower at runtime, and prone to the translation bugs the column-direct version cannot have.
Measurements
Serialisation’s slow reputation is the text path; a binary per-row encoder is barely slower than the column snapshot, and its cost is mostly the per-row function call. Either way the column-direct snapshot wins and carries no per-row translation bugs. Full output: code/README.md.
| # | measurement | Ryzen 9 (modern) | i7-3610QM (2012) | i3-5010U (2015) | Pi 4 |
|---|---|---|---|---|---|
| 1 | per-row JSON vs column snapshot, 1M | 31x | 55x | 64x | 33x |
| 2 | per-row binary vs column snapshot, 1M | ~1x | ~2x | ~2x | ~2x |
Exercises
- Snapshot the world. Implement a
snapshotfunction for your simulator. Save tosnapshot.bin. Note the file size: it should matchbytes per column × Nfor hot tables, plus headers. - Load the snapshot. Implement the inverse. Load
snapshot.bininto a freshWorld. Verify by running the simulator from the loaded state and comparing the hash to the original at the same tick. - The OOP comparison. Define a
CreatureRecordstruct and write a per-row serialiser viaserde_jsonorbincode. Time it against the column snapshot at 1M creatures. The cost depends entirely on the format: measured (row_vs_column_serialize), a per-row text encoder (theserde_jsonshape) is ~30-65× slower than the column snapshot across the four reference machines1; a per-row binary encoder (thebincodeshape) is only ~1-2× slower2. The text path is where serialisation’s slow reputation comes from; the binary path’s cost is mostly the per-row function call. Either way the column snapshot wins, and it carries none of the per-row translation bugs. - Schema versioning. Add a new column (
hunger_buildup: f32) to the simulator. Make the snapshot reader handle both old and new versions: old snapshots get the new column zero-filled; new snapshots get loaded directly. Verify both round-trip cleanly. - (stretch) Memory-mapped snapshot. Use
memmap2to map the snapshot file directly into memory. The Vec’s pointer is the file’s memory; loading is zero-copy. Compare load times for a 24 MB snapshot.
Reference notes in 36_persistence_is_serialization_solutions.md.
What’s next
§37 - The log is the world makes the structural argument explicit: the log of events and the world’s tables share a shape; one is a projection of the other.
Solutions: 36 - Persistence is table serialization
Exercise 1 - Snapshot
#![allow(unused)]
fn main() {
const SCHEMA_VERSION: u16 = 1;
fn snapshot(world: &World, path: &Path) -> std::io::Result<()> {
use std::io::Write;
let mut f = std::fs::File::create(path)?;
f.write_all(&world.tick.to_le_bytes())?;
f.write_all(&SCHEMA_VERSION.to_le_bytes())?;
let n = world.creatures.px.len() as u32;
f.write_all(&n.to_le_bytes())?;
write_slice(&mut f, &world.creatures.px)?;
write_slice(&mut f, &world.creatures.py)?;
write_slice(&mut f, &world.creatures.vx)?;
write_slice(&mut f, &world.creatures.vy)?;
write_slice(&mut f, &world.creatures.energy)?;
write_slice(&mut f, &world.creatures.id)?;
Ok(())
}
fn write_slice<T>(f: &mut std::fs::File, v: &[T]) -> std::io::Result<()> {
use std::io::Write;
let bytes: &[u8] = unsafe {
std::slice::from_raw_parts(v.as_ptr() as *const u8, std::mem::size_of_val(v))
};
f.write_all(bytes)
}
}The unsafe is for direct byte access. In production, use bytemuck::Pod to get the same effect safely. For 1 M creatures, the snapshot is roughly 24 MB; writing it is one bulk syscall, ~5-10 ms on NVMe.
Exercise 2 - Load
#![allow(unused)]
fn main() {
fn load(path: &Path) -> std::io::Result<World> {
use std::io::Read;
let mut f = std::fs::File::open(path)?;
let mut tick_bytes = [0u8; 8];
f.read_exact(&mut tick_bytes)?;
let tick = u64::from_le_bytes(tick_bytes);
let mut sv = [0u8; 2];
f.read_exact(&mut sv)?;
let _schema_version = u16::from_le_bytes(sv);
let mut n_bytes = [0u8; 4];
f.read_exact(&mut n_bytes)?;
let n = u32::from_le_bytes(n_bytes) as usize;
let mut world = World::new(tick);
world.creatures.px = read_vec::<f32>(&mut f, n)?;
world.creatures.py = read_vec::<f32>(&mut f, n)?;
// ... vx, vy, energy, id ...
Ok(world)
}
}After load, hash_world(&loaded) matches hash_world(&original) byte for byte. Determinism + transposition = round-trip safety.
Exercise 3 - OOP comparison
For 1 M creatures:
- Column snapshot via raw bytes: ~5-10 ms.
- Per-row
serde_json::to_writer: ~500-1000 ms (text encoding, per-row overhead). - Per-row
bincode::serialize_into: ~50-100 ms (binary, per-row overhead).
The column-direct version is bound by sequential disk bandwidth. The per-row versions add CPU encoding cost on top.
Exercise 4 - Schema versioning
#![allow(unused)]
fn main() {
let schema_version = u16::from_le_bytes(sv);
if schema_version >= 2 {
world.creatures.hunger_buildup = read_vec::<f32>(&mut f, n)?;
} else {
world.creatures.hunger_buildup = vec![0.0; n]; // default for older snapshots
}
}Old snapshots (v1) lack the hunger_buildup column; the loader supplies zeros. New snapshots (v2) include it. Both round-trip cleanly. Version migration lives at load time, in one place; the rest of the simulator does not know about it.
Exercise 5 - Memory-mapped snapshot
#![allow(unused)]
fn main() {
use memmap2::MmapOptions;
let f = std::fs::File::open(path)?;
let mmap = unsafe { MmapOptions::new().map(&f)? };
let bytes: &[u8] = &mmap;
// Parse columns directly from `bytes` - no copy.
}For a 24 MB snapshot:
- Read-into-Vec: ~5 ms (one syscall + memcpy from kernel buffer to user heap).
- mmap: ~10 µs initial setup; access is page-faulted lazily.
If the simulator accesses the loaded data sequentially after load, mmap wins. If access is random, mmap pays page-fault costs each time. For load-once-then-stream patterns, mmap is the cleaner option.
37 - The log is the world
Concept node: see the DAG and glossary entry 37.
§36 said persistence is transposition: the in-memory tables are written as their bytes, read back as their bytes. This section makes the deeper structural claim. The log is the world, and the world is the log decoded.
In an event-sourced simulator, every state change is an event:
(tick=42, kind=become_hungry, creature_id=17)
(tick=42, kind=eat, creature_id=23, food_id=8, energy_delta=+5.0)
(tick=43, kind=reproduce, parent_id=14, offspring_id=400, offspring_energy=2.5)
(tick=43, kind=die, creature_id=89)
The log is a sequence of such events. The world’s tables can be reconstructed from the log: start from an empty world (or a snapshot), replay events in order, and the resulting tables are bit-identical to the world the live simulator produced.
The structural fact: the log and the world have the same shape.
In memory a presence table like hungry is a list of slots (§17); in the log it is a stream of become_hungry and stop_being_hungry events keyed by the stable creature id - the boundary rule from §26, since a slot is meaningless once the world is reloaded into a different layout. Replaying that stream of (tick, creature_id) pairs reconstructs the membership.
A column energy: Vec<f32> is the result of starting from an empty Vec plus the events that wrote each entry. The log holds these writes; the column is the cumulative effect of replaying them.
In the most explicit form - the triple-store shape - the log is a sequence of (rid, key, val) triples:
rid= which entity: the stable id, not the slotkey= which cell: a code fortable.column(e.g.creatures.energy)val= the value written there
Read one triple as a sentence: entity rid, cell table.column, becomes val. The key is best read as table.column - it names the table and the column, so (rid, table.column) is a fully-qualified address of one cell anywhere in the world. That table.column form is what makes the log uniform: every state change, in every table, is the same three fields, and replay is the mechanical world.table.column[id_to_slot[rid]] = val applied over the log in order. The codebook stores each distinct table.column string once and the per-event key as a small integer code, so the log never carries the string. (This is a write-ahead log: table.column, row-by-id, value.)
Three stable handles, one moving thing left out. The entity id is identity - it survives relocation and the save (§26). The table.column is the schema address - stable as long as the schema is. The value is the write. The slot - the entity’s momentary position in the columns - is never logged, because it is the one part that moves; replay re-derives it through id_to_slot (§23). The triples form the log; transposed, they form the columns. Transposition is the only translation. There is no impedance mismatch because there is no model gap.
A working specimen: code/logger
The crate code/logger implements this triple-store shape directly, dependency-free. Its design is worth walking through, because it meets three problems that recur whenever a simulator wants to log everything.
The IOPS problem → batching. A naive event logger calls write once per event. At a million events per minute, that is millions of disk operations per minute - bound by IOPS, not bandwidth (§38). The disk’s bandwidth sits mostly idle while it queues operations. The fix: collect events into an in-memory buffer; when the buffer fills, flush it as one large write. IOPS scales with “buffer flushes per second”; bandwidth absorbs the actual byte volume. Logging cost drops from disk-latency-bound to bandwidth-bound - typically 100-1000× faster.
The redundancy problem → codebook and type inference. Most fields in a simulator’s event records repeat: the same kind code thousands of times, the same set of activity strings, the same handful of entity types. Storing each event’s full payload wastes bytes. The fix: a codebook assigns each unique string a small integer code; the log stores the code, not the string. On read, the codebook reverses the mapping. The crate goes one step further with type inference - every value is stored as one f64 (8 bytes), whether it began as an integer, a float, or a string code. Integers up to 2⁵³ round-trip exactly; the union format eliminates per-field type tags. With only the populated fields stored per record, a sparse log uses far less memory than dense column arrays.
The write-blocking problem → the revolver. If the foreground blocks while the disk flushes, the simulator pauses on every flush. The fix: two buffers cycle between the foreground and a background writer thread. When one fills, the foreground hands it to the writer over a channel and takes a recycled empty one back; the writer flushes it and recycles it. When the foreground outruns the writer, that empty-buffer channel becomes the backpressure. From the simulator’s side, writing an event is a few pushes to a Vec, never a wait on disk - std::sync::mpsc does both the hand-off and the flow control.
The combined result: log() costs ~160 ns at 5 fields and ~310 ns at 11 on this machine, sub-microsecond and dominated by the codebook lookups and the Vec pushes (cargo run --release --bin benchmark times both widths; the number is on your machine, not on trust). The hot-path output is a sequence of raw little-endian column-byte chunks written sequentially by the background thread - the bytes on disk are the bytes in memory (§36), no .npz, no serde. Read-back rebuilds dense columns and presence masks (to_arrays), iterates decoded rows, and exports CSV; a SQLite export is left to a downstream converter, since SQLite is not in Rust’s std and a crate would forfeit the crate’s dependency-free property. The structural identity - log = world - holds across all these formats; what changes is the storage system at the boundary (§38).
The design is justified structurally, not by a microbenchmark: the sparse triple-store stores only what a record populates, the codebook deduplicates the strings, and the single f64 value stream erases per-field type tags. None of the three is exotic; together they are the compact shape a sparse simulation log wants. Three views of the same idea are sketched in the stretch exercise below.
The library does not need to know what an “event” is. It stores triples; the consumer interprets them. That separation is what makes the same code serve as a simulation logger, an audit trail, and a replay source - three uses, one structural pattern.
Why this matters in practice:
Replay is structural. Snapshot + log = pause/resume. To recover the world at any tick T, load the most recent snapshot at tick S ≤ T, then replay the log from S to T. The cost is bounded by T - S events, which is small if snapshots are taken regularly.
Auditability is free. Every change in the world is in the log. To answer “why is creature 17 dead?”, scan the log for events involving 17. The log is the system’s complete history, in order.
Testing is replay. A test fixture is an initial world plus a log. A test is “replay this log; assert this property of the result”. No mocks, no setup methods, no fixture builders.
Distribution is structural. Two nodes running identical code from the same log produce bit-identical worlds. Send the log; the worlds converge.
The log is the system of record. Snapshots are caches of the log’s state; they exist for performance, not correctness. If snapshots are lost, the log can rebuild them. If the log is lost, no snapshot can recover events that have not been logged.
The discipline that makes this work is structural, not stylistic. Every state change in the simulator is logged before being applied. The cleanup pass (§22) is the natural place - it sees every mutation and can record each one as it commits. The §38 storage system is the natural sink - log writes are sequential, batched, and amortised across the tick.
A simulator that respects this discipline is one whose history is the log, whose state is a projection of the log, and whose persistence is the log plus the most recent snapshot. Every other property the book has built - determinism, parallelism, EBP dispatch, snapshot serialisation - composes with this one.
Exercises
-
Log the simulator. Add an
events: Vec<Event>table to your world. Modify the cleanup pass to push one event per applied mutation. After 100 ticks, the log has roughlyactive × ticksevents. -
Reconstruct from the log. Write a
replay(initial: World, events: &[Event]) -> Worldthat applies each event in order. Verify: starting from an initial world and applying the log produces a world identical to the live simulator’s output at the same tick. -
Save and load the log. Persist the log via §36’s column serialisation. Reload. Replay. Confirm bit-identical state.
-
Snapshot + log. Save a snapshot at tick S; save the log from tick S onward. Reconstruct any tick T > S by loading the snapshot and replaying the log from S to T. Verify against the live simulator.
-
The triple-store form. Convert your
eventstable to three parallel arrays:rids: Vec<u32>,keys: Vec<u8>,vals: Vec<f64>. Compare the storage size to the per-event-struct version. The triple-store form is typically 2-3× more compact for events with sparse fields. -
(stretch) A logger, three ways.
code/loggeris the crate form, built and benchmarked. Read it, then sketch the other two shapes and compare what each gains and loses:- As a crate (the built one). Read
code/logger/src/lib.rs: alog()over(name, Value)records, an evolving codebook, a double-buffered writer thread, reusable across simulators behind a stable public API. Note what that public boundary costs versus the two forms below. - As a module inside your simulator. Same shape, but accessing the simulator’s existing types (
Event,World) directly without crossing a crate boundary. Less reusable, more efficient - no public API to keep stable. - As an ECS system. A logging system whose read-set is
to_remove,to_insert, and any other commit-time tables, and whose write-set is the log buffer. It runs in the same DAG ascleanup, perhaps merged with it. The two halves of cleanup - committing mutations and logging them - become one system.
Sketch the module and system forms; the crate form is already in
code/loggerto compare against. Weigh what each gains and loses: reusability, performance, ease of testing, distance from the simulator’s other concerns. - As a crate (the built one). Read
Reference notes in 37_log_is_world_solutions.md.
What’s next
§38 - Storage systems: bandwidth and IOPS names the cost of crossing the I/O boundary in concrete terms. The log lives there; so does the snapshot; so does every external connection.
Solutions: 37 - The log is the world
Exercise 1 - Log the simulator
#![allow(unused)]
fn main() {
struct Event {
tick: u64,
kind: u8, // BORN, DIE, EAT, BECAME_HUNGRY, ...
creature_id: u32,
payload_a: u64, // food_id, parent_id, ...
payload_b: f32, // energy_delta, ...
}
fn cleanup(world: &mut World, events: &mut Vec<Event>) {
for &id in &world.to_remove {
events.push(Event {
tick: world.tick, kind: DIE,
creature_id: id, payload_a: 0, payload_b: 0.0,
});
// ... apply removal ...
}
for row in &world.to_insert {
events.push(Event {
tick: world.tick, kind: BORN,
creature_id: row.id, payload_a: row.parent_id as u64,
payload_b: row.energy,
});
// ... apply insertion ...
}
}
}For a 100-creature simulator with steady birth and death, 100 ticks → roughly 200-1000 events depending on activity rate.
Exercise 2 - Reconstruct from the log
#![allow(unused)]
fn main() {
fn replay(initial: &World, events: &[Event]) -> World {
let mut w = initial.clone();
for e in events {
match e.kind {
BORN => insert_creature(&mut w, e.creature_id, e.payload_b),
DIE => remove_creature(&mut w, e.creature_id),
EAT => apply_eat(&mut w, e.creature_id, e.payload_a as u32, e.payload_b),
BECAME_HUNGRY => mark_hungry(&mut w, e.creature_id),
// ...
}
}
w
}
}Run the simulator live for 100 ticks → world A. Run replay(initial, &events) → world B. hash_world(&A) == hash_world(&B). The world is the log decoded.
Exercise 3 - Save and load the log
The log is a Vec<Event> - same shape as any column-based table. Use §36’s column serialisation pattern. Save the log; load it; replay it onto the initial world; compare hashes.
Exercise 4 - Snapshot + log
#![allow(unused)]
fn main() {
// At tick 0: snapshot.
snapshot(&world, "tick_0.snap")?;
// Run for 100 ticks, logging events.
let log = run_with_logging(&mut world, 100);
// Reconstruct any later tick T:
let snap_world = load("tick_0.snap")?;
let world_at_T = replay(&snap_world, &log[0..events_through_tick(T)]);
}Snapshots are taken at convenient points; the log is appended continuously. Reconstruction at any T uses the most recent snapshot at S ≤ T plus the log slice from S to T.
Exercise 5 - Triple-store form
#![allow(unused)]
fn main() {
struct Triple { rid: u32, key: u8, val: f64 }
let triples: Vec<Triple> = events.iter().flat_map(|e| match e.kind {
DIE => vec![Triple { rid: e.creature_id, key: KEY_DEAD, val: 1.0 }],
BORN => vec![
Triple { rid: e.creature_id, key: KEY_PARENT, val: e.payload_a as f64 },
Triple { rid: e.creature_id, key: KEY_ENERGY, val: e.payload_b as f64 },
],
// ...
}).collect();
}For events with sparse fields (a DIE event uses only creature_id; an EAT event uses three fields), the triple-store form is 2-3× more compact because empty fields don’t take space.
Exercise 6 - A working specimen
code/logger implements the triple-store shape directly:
rids: Vec<u32>- which entity: the stable id, not the slotkeys: Vec<u16>- which cell: a code fortable.column(which table and column the value writes to)vals: Vec<f64>- the value, as 8 bytes (integers up to 2⁵³ round-trip exactly; strings are codebook-encoded to integers, then stored as the integer)
On read, these are densified into per-field Vecs plus presence masks. The same shape that was on disk is now in memory, ready for systems to iterate. The library does not need to know what an “event” is; it stores triples and lets the consumer interpret them. The §17/§37 structural pattern in working code.
38 - Storage systems: bandwidth and IOPS
Concept node: see the DAG and glossary entry 38.
A storage system is the part of the program that crosses the boundary into something that holds bytes for longer than RAM does. Disk, network, distributed file system, message queue, message broker - all are storage systems. They differ in technology; they share a cost model.
The cost has two dimensions.
Bandwidth - bytes per second. How fast bytes can move through the storage system. NVMe SSD is roughly 3-7 GB/s read, 2-5 GB/s write. SATA SSD: ~500 MB/s. Spinning HDD: 100-200 MB/s sequential. Gigabit network: 100 MB/s. 10 Gbit network: 1 GB/s. SQLite on local NVMe: 200-500 MB/s for bulk inserts.
IOPS - operations per second. How many separate read/write operations the storage system can complete per second. NVMe: 100K-1M random IOPS; sequential IOPS counts are much higher (the underlying flash can stream). SATA SSD: 50-100K IOPS. HDD: 100-200 IOPS (limited by seek time). Network connection: bounded by latency × concurrency.
A workload’s cost is bounded by both. A 1 MB sequential read on NVMe is one IOP and ~250 µs of bandwidth time. A million 1-byte random reads is a million IOPs and ~10 seconds of latency time. Same total bytes, three orders of magnitude apart.
The §22 batched-cleanup pattern at §30’s streaming scale gathers many small mutations into one large write. This converts a high-IOPS, low-bandwidth workload (1000 separate writes per tick) into a low-IOPS, bandwidth-friendly one (one batched write per tick)1. The pattern is the natural fit for storage systems where IOPS is the binding constraint.
Three concrete examples worth keeping in mind:
SQLite. On local NVMe, SQLite handles ~50 K row inserts per second using one-by-one INSERT statements; ~500 K-1 M per second using prepared statements with batched transactions; ~5 M per second using INSERT INTO ... SELECT FROM ... over an in-memory table. What separates the tiers is the transaction boundary, not the driver (rusqlite, sqlx, and the C API all reach every tier): a bare INSERT is its own implicit transaction and its own fsync, a BEGIN/COMMIT around a batch amortises that fsync across every row in it, and a staged INSERT ... SELECT pays it once for the whole load. It is the same batch-the-commit move as the cleanup queue (§22) and the log (§37). The same database, three orders of magnitude in throughput, depending on whether the workload pushes IOPS or bandwidth.
Network sockets. A round-trip to a server is bounded by latency: ~0.1 ms LAN, ~10-100 ms internet, ~1 ms data centre. Each round-trip is one IOP from the workload’s perspective. Bandwidth is not the binding constraint until the response is many KB. The §22 pattern at this scale: batch many requests into one round-trip.
Distributed file systems. S3, EFS, CephFS - bandwidth scales with concurrency (many parallel reads from many objects = high aggregate bandwidth) but per-object IOPS is low (one operation per request). Workloads that want sequential bandwidth fan out across many objects; workloads that want low latency on small reads do not fit this storage system.
The lesson: when adding a storage system to the simulator, measure both bandwidth and IOPS of your workload - not just the system’s spec sheet. A 7 GB/s NVMe drive limited to 100 K IOPS is bottlenecked at ~30 KB per IOP for random workloads. Below that block size, IOPS bind.
The §4 budget framing applies here too. A 30 Hz tick has 33 ms of budget. A 100 µs disk read costs 0.3 % of the budget. Ten of them cost 3 %. A hundred cost 30 % - already a third of the tick. Bound the I/O per tick, batch where possible, and treat every cross-boundary operation as a real cost in the same ledger as cache misses and arithmetic.
The simulator inside the boundary is a pure function. The storage system at the boundary is the function’s connection to durable reality. The cost of that connection is the bandwidth × IOPS budget; the discipline is the batching pattern; the architecture is the queue.
Measurements
Batching many small writes into one trades a high-IOPS workload for a bandwidth-friendly one; how much it buys depends on the per-write overhead of the path (the 2012 laptop’s slow per-write syscall path is the outlier). Full output: code/README.md.
| # | measurement | Ryzen 9 (modern) | i7-3610QM (2012) | i3-5010U (2015) | Pi 4 |
|---|---|---|---|---|---|
| 1 | batched vs unbatched write | 38x | 256x | 30x | 14x |
Exercises
- Measure your bandwidth. On Linux:
dd if=/dev/zero of=/tmp/test bs=1M count=1024 oflag=directmeasures sequential write. Note your number. - Measure your IOPS. Time 10 000 separate
File::writecalls of 4 KB each, withsync_all()after the loop. Compute IOPS as10_000 / time_in_seconds. Compare to the spec sheet. - Batched vs unbatched. Write 1 000 000 rows of 32 bytes each to a file: first as 1 000 000 separate writes; then as one bulk write. Compare times. The batched version is much faster - measured 14-256× across the four reference machines (
batched_write), the spread driven by filesystem and write buffering. With anfsyncper write (a durable log) the gap widens by orders of magnitude; the exercise here measures buffered writes, which is the floor. - SQLite throughput. Insert 1 000 000 rows into a SQLite table: first as separate
INSERTstatements; then in a single transaction; then via oneINSERT INTO ... VALUES (...)with all rows. Note the three orders of magnitude. - Compute your tick budget. At 30 Hz with 1 000 mutations per tick, what is the largest acceptable per-mutation I/O cost? Below NVMe latency, you are fine; above it, you must batch.
- (stretch) A second storage system. If you have a network filesystem handy (NFS, SSHFS), repeat exercise 3 against a remote file. Note the latency-vs-bandwidth tradeoff. The IOPS limit is your bandwidth-delay product divided by IO size.
Reference notes in 38_storage_systems_solutions.md.
What’s next
You have closed I/O & persistence. The simulator can now talk to durable storage and external systems without sacrificing determinism or layout discipline. The next phase is System of systems, starting with §39 - System of systems: the patterns for work that does not fit the standard tick model - long-running optimisation, time-sliced search, out-of-loop computation. After that, Discipline (§40-§43) closes the book with the design rules that keep the simulator working over time.
Solutions: 38 - Storage systems
Exercise 1 - Bandwidth
$ dd if=/dev/zero of=/tmp/test bs=1M count=1024 oflag=direct
1073741824 bytes (1.1 GB) copied, 0.395 s, 2.7 GB/s
Typical numbers:
- NVMe SSD (PCIe 4.0): 3-7 GB/s sequential write
- SATA SSD: ~500 MB/s
- Spinning HDD: 100-200 MB/s
- USB 3 external: depends on the device, often 200-500 MB/s
oflag=direct bypasses the OS page cache, giving you the device’s actual bandwidth, not what the page cache absorbs.
Exercise 2 - IOPS
#![allow(unused)]
fn main() {
use std::io::Write;
use std::time::Instant;
let mut f = std::fs::File::create("/tmp/iops_test")?;
let buf = [0u8; 4096];
let n = 10_000;
let start = Instant::now();
for _ in 0..n {
f.write_all(&buf)?;
}
f.sync_all()?; // important - without this, writes sit in the OS buffer
let elapsed = start.elapsed();
println!("IOPS: {:.0}", n as f64 / elapsed.as_secs_f64());
}Typical numbers:
- NVMe: 50-200 K IOPS for 4 KB writes (the device may report higher random IOPS in benchmarks; sequential same-block writes hit different caches)
- SATA SSD: 50-100 K IOPS
- HDD: 100-200 IOPS
Without sync_all, the kernel buffers writes; the apparent IOPS is much higher than the device’s actual rate. The actual disk-side IOPS is what sync_all exposes.
Exercise 3 - Batched vs unbatched
#![allow(unused)]
fn main() {
// Unbatched: 1M writes
let mut f = std::fs::File::create("/tmp/unbatched")?;
for _ in 0..1_000_000 {
f.write_all(&[0u8; 32])?;
}
f.sync_all()?;
// Batched: 1 write
let mut f = std::fs::File::create("/tmp/batched")?;
let big_buf = vec![0u8; 32 * 1_000_000];
f.write_all(&big_buf)?;
f.sync_all()?;
}Typical results on NVMe:
- Unbatched: 5-30 seconds (1 M writes × IOPS limit)
- Batched: 50-100 ms (one ~30 MB write at sequential bandwidth)
100-500× faster. The exact ratio depends on the OS page cache’s absorption behaviour; with sync_all to expose the actual disk-side cost, the gap is at the upper end.
Exercise 4 - SQLite throughput
#![allow(unused)]
fn main() {
// Per-row INSERT (no transaction): ~50K rows/sec
for row in &rows {
conn.execute("INSERT INTO t VALUES (?, ?, ?)", params![/* ... */])?;
}
// Single transaction: ~500K-1M rows/sec
conn.execute("BEGIN", [])?;
for row in &rows {
conn.execute("INSERT INTO t VALUES (?, ?, ?)", params![/* ... */])?;
}
conn.execute("COMMIT", [])?;
// Bulk INSERT VALUES: ~5M rows/sec
let mut sql = String::from("INSERT INTO t VALUES ");
for row in &rows {
sql.push_str(&format!("({}, {}, {}),", row.0, row.1, row.2));
}
sql.pop(); // trailing comma
conn.execute(&sql, [])?;
}The IOPS dimension binds the per-row version (each INSERT is one disk operation when not in a transaction). The transaction version reduces per-row to one shared commit. The bulk-VALUES version reduces 1M operations to one - bandwidth-bound, not IOPS-bound.
Exercise 5 - Tick budget
At 30 Hz: 33 ms / tick = 33 000 µs.
For 1000 mutations per tick:
- Per-mutation budget = 33 µs.
- NVMe latency = 100 µs (about 3× over budget per mutation).
- Batched: 1000 × 32 B = 32 KB, one ~5 µs write at NVMe sequential bandwidth (well under budget).
Unbatched mutations cannot fit a 30 Hz budget; batched ones easily can.
Exercise 6 - A second storage system
For SSHFS at LAN latency (~0.5 ms RTT):
- Per-statement INSERT: 2 RTT minimum ≈ 1 ms = ~1000 IOPS max
- Single-transaction with 1 M rows: 2 RTT for the transaction (commit) + bandwidth for the data ≈ 100 ms total
- The IOPS limit is the bandwidth-delay product divided by IO size: at 1 Gbit/s × 0.5 ms = 64 KB in flight, so ~16 K IOPS max for 4 KB I/Os, ~1 K for 64 KB.
The pattern is the same: batching converts a high-latency, low-bandwidth workload into a sequential one bounded by bandwidth. On a network filesystem the latency penalty is much larger; the batching imperative is correspondingly stronger.
39 - System of systems
Concept node: see the DAG and glossary entry 39.
The trunk so far has assumed every system runs every tick and completes within the tick budget. That covers most of what the simulator does - motion, EBP dispatch, cleanup, persistence - and the surrounding chapters earned the assumption. But the assumption is not universal. Practical simulators have at least three classes of work that do not fit it.
- Optimisation. A scheduler choosing which tasks each warehouse robot should take next. A combat AI choosing a counter-strategy. A constraint solver finding a feasible plan. These can take seconds or minutes; they cannot fit in a 33 ms tick.
- Search. The nearest-task scan for a warehouse operator. A path-finder over a large map. A neighbour query in a million-creature world. Even with §28’s spatial binning, some searches genuinely take longer than one tick can afford.
- Out-of-process work. A game AI evolving its strategy on a separate thread. A pricing model running on a remote server. A precomputation handed off to a worker pool. The simulator never blocks waiting; results arrive when they arrive.
This chapter names the three patterns that cover these cases without breaking any of the trunk’s previous rules. They are not new architecture. They are the trunk’s existing rules, applied to a wider set of cadences.
The unifying principle: a system has a cadence, and the cadence does not have to be one tick. A system can run every tick (motion). It can run every N ticks (the spatial compaction from §28/§24, which reorders the columns by cell every few dozen ticks). It can have a deadline and return its best current answer when the deadline arrives. It can be suspended and resumed across ticks, with its progress part of its state. It can be out-of-loop entirely, communicating with the simulator only through the queue. The DAG generalises naturally: edges still represent dependencies, but some dependencies wait for promises rather than synchronous returns.
Anytime algorithms
An anytime algorithm produces a valid answer at any time after it has started. The longer it runs, the better the answer. CP-SAT, Monte Carlo Tree Search, evolutionary algorithms, simulated annealing, branch-and-bound - all are anytime. They have a common shape: maintain a best so far; refine it as long as time permits; return best so far when the budget runs out.
For the simulator, the system call looks synchronous from the trunk’s perspective:
#![allow(unused)]
fn main() {
fn plan_route(world: &World, deadline: Instant) -> Route {
let mut best = greedy_route(world);
while Instant::now() < deadline {
let candidate = improve(&best, world);
if score(&candidate) > score(&best) { best = candidate; }
}
best
}
}The deadline is the budget. The algorithm respects it. Quality is a function of how much time was available - at 5 ms it is mediocre but valid; at 50 ms it is good; at 500 ms it is near-optimal. The simulator can give it whatever budget the tick allows and never get blocked.
This is §4 applied to a long computation: the budget is named explicitly, and the algorithm honours it. The student who has internalised the budget calculus already knows how to design these algorithms; the only new vocabulary is the anytime contract.
|
|
Note - Soft real-time, not hard. The deadline here is a budget, not a guarantee. An anytime algorithm honours its deadline by returning the best answer it has when the deadline arrives; if that answer is mediocre, the system degrades gracefully but still ships a frame. That is soft real-time: a missed deadline costs quality, not correctness. Hard real-time is a different discipline. When a missed deadline is a fault - an avionics control loop, a surgical robot, motor control, an AMR’s emergency stop that fails to fire in time - you need worst-case execution time (WCET) analysis, bounded jitter, no allocation and no syscall in the inner loop, and a scheduler that can enforce deadlines ( |
Time-sliced computation
Some work cannot be made anytime - there is no “best partial answer” until the work is complete. A spatial search that has examined 20 % of the cells has a 20 % chance of having found the answer; otherwise it has nothing useful to report. For these, the pattern is time-slicing: divide the work across many ticks, with the system’s progress as part of its persistent state.
#![allow(unused)]
fn main() {
struct SpatialSearch {
target_px: f32, target_py: f32,
cursor: usize, // next cell to examine
best: Option<(u32, f32)>, // (creature_id, distance) so far
}
fn step_search(s: &mut SpatialSearch, world: &World, max_cells: usize) {
let end = (s.cursor + max_cells).min(world.cells.len());
for cell in s.cursor..end {
for &id in &world.cells[cell] {
let i = id as usize;
let d = distance(world.creatures.px[i], world.creatures.py[i], s.target_px, s.target_py);
if s.best.map_or(true, |(_, prev)| d < prev) {
s.best = Some((id, d));
}
}
}
s.cursor = end;
}
}Each call examines max_cells cells. The simulator runs step_search every tick (or every N ticks); progress accumulates in cursor and best; when cursor reaches the end, the search is complete and the result is delivered. From the simulator’s perspective, the search is one system that takes its budget every tick until done.
This is §15 applied to a long computation: the system’s state at tick start includes its in-progress work. The buffering rule that lets every system see consistent input also lets a system pick up where it left off.
Out-of-loop computation
For work that is genuinely too large for any tick budget - a game AI re-planning its grand strategy, an offline machine-learning model, a remote optimisation service - the pattern is out-of-loop: the work runs on a separate thread, process, or machine, completely outside the simulator’s tick. The simulator never blocks. When the work completes, its result enters the simulator through the input queue (§35) like any other input event.
#![allow(unused)]
fn main() {
// Out-of-loop, on a worker thread:
fn ai_planner_thread(snapshot_rx: Receiver<WorldSnapshot>, result_tx: Sender<InputEvent>) {
while let Ok(snapshot) = snapshot_rx.recv() {
let strategy = compute_counter_strategy(&snapshot); // could take seconds
let _ = result_tx.send(InputEvent::StrategyUpdate(strategy));
}
}
// Inside the simulator's tick:
fn dispatch_ai(world: &World, snapshot_tx: &Sender<WorldSnapshot>) {
if world.tick % 30 == 0 { // every second at 30 Hz
let _ = snapshot_tx.try_send(snapshot_of(world));
}
}
}The simulator dispatches a snapshot every second; the AI thread chews on it; the strategy update lands in the input queue some time later. The strategy might be three ticks late, or three seconds late - the simulator does not know and does not care. The result is just one more input event; the queue mechanism is the same.
This is §35 applied to a long computation: anything that crosses the boundary takes its own time, and the queue absorbs the latency. The discipline is not to wait - never block the tick on an out-of-loop result.
Hierarchical scheduling
Production simulators usually combine these patterns. Game engines run physics at 60 Hz (every-tick), AI at 5 Hz (every-12-ticks), save-game at 0.1 Hz (every-300-ticks), and a strategic planner out-of-loop on a worker. Industrial control loops run inner loops at 1 kHz and outer loops at 10 Hz. The DAG generalises: each system is annotated with its cadence; the scheduler runs each according to its frequency or trigger; the result is a system of systems - one architecture, many cadences.
The chapter is constructive: it names the three patterns and shows where each fits the simulator’s existing structure. The next phase, Discipline, addresses what comes after: how to keep the architecture working as it ages, as people leave, as requirements change. Making it work is this chapter; keeping it working is the four chapters that follow.
Exercises
- Audit cadence. For each system in your simulator, name its cadence. Most are “every tick”; the ones that are not are candidates for the patterns in this chapter. Note any system whose work is currently capped or skipped because it would exceed the budget - these are unmet needs the patterns can serve.
- Anytime path-finder. Implement
plan_route(world, deadline)for one creature. The function returns the best path found within the deadline. With a 5 ms deadline, time how good the answers are; with 50 ms, how much better. Plot quality vs deadline. - Time-sliced spatial search. Implement
SpatialSearchandstep_searchas in the prose. Run it across multiple ticks, advancing the cursor by a budget-boundedmax_cellseach tick. Verify the result is identical to a single-pass search done in one go. - Out-of-loop AI. Spawn a worker thread that receives world snapshots and returns strategy updates via channels. Dispatch a snapshot every second; let the worker take 5 seconds; observe that the simulator’s tick rate is unaffected and the strategy update lands at the queue when ready.
- Mixed cadence. Run your simulator with motion at every tick, the spatial compaction every 50 ticks, snapshot every 1000 ticks, and a (mock) AI thread updating strategy out-of-loop. Verify that determinism still holds: same seed plus same input queue produces identical hashes after 1000 ticks.
- (stretch) Anytime under varying budget. Modify the path-finder so its caller passes the remaining tick budget each time. Some ticks have plenty of budget; some have very little. The path-finder still returns a valid answer in every case, and the answers improve when the budget allows. Plot quality over time as the simulator runs.
Reference notes in 39_system_of_systems_solutions.md.
What’s next
§40 - Mechanism vs policy opens Discipline: the rules that hold the architecture together over time. Where this chapter was about making the system work for problems that don’t fit the standard tick, the next four chapters are about keeping it working as it ages.
Solutions: 39 - System of systems
Exercise 1 - Cadence audit
For a typical simulator the breakdown looks like:
| system | cadence | reason |
|---|---|---|
| motion | every tick | physics, the inner loop |
| food_spawn | every tick | per-tick policy |
| next_event | every tick | event detection |
| apply_eat/repro/starve | every tick | event consumption |
| cleanup | every tick | mutation commit |
| inspect | every tick | observation |
| spatial compaction | every ~50 ticks | amortised cost |
| snapshot | every ~1000 ticks | persistence checkpoint |
| AI/strategy | out-of-loop | seconds-long computation |
| route planning | anytime, per-creature | budget-bounded path search |
| spatial search | time-sliced | bounded max_cells per tick |
The unmet-need column is what the chapter speaks to: any work currently being skipped or truncated is a candidate for one of the three patterns.
Exercise 2 - Anytime path-finder
#![allow(unused)]
fn main() {
use std::time::Instant;
fn plan_route(world: &World, start_px: f32, start_py: f32, goal_px: f32, goal_py: f32, deadline: Instant) -> Route {
let mut best = greedy_route(world, start_px, start_py, goal_px, goal_py);
let mut iter = 0;
while Instant::now() < deadline {
let candidate = local_search_step(&best, world);
if cost(&candidate) < cost(&best) {
best = candidate;
}
iter += 1;
}
eprintln!("plan_route: {iter} iterations, cost {}", cost(&best));
best
}
}Typical numbers (illustrative; depends on the map):
- 1 ms deadline: ~10 iterations, ~50% optimal
- 5 ms: ~50 iterations, ~75% optimal
- 50 ms: ~500 iterations, ~95% optimal
- 500 ms: ~5000 iterations, ~99.5% optimal
The shape - diminishing returns over time - is generic to anytime algorithms. The deadline is the budget; quality scales with the budget; the simulator never waits past the deadline.
Exercise 3 - Time-sliced spatial search
#![allow(unused)]
fn main() {
struct SpatialSearch {
target_px: f32, target_py: f32,
cursor: usize,
best: Option<(u32, f32)>,
done: bool,
}
fn step_search(s: &mut SpatialSearch, world: &World, max_cells: usize) {
let end = (s.cursor + max_cells).min(world.cells.len());
for cell in s.cursor..end {
for &id in &world.cells[cell] {
let i = id as usize;
let d = distance(world.creatures.px[i], world.creatures.py[i], s.target_px, s.target_py);
if s.best.map_or(true, |(_, prev)| d < prev) {
s.best = Some((id, d));
}
}
}
s.cursor = end;
if s.cursor == world.cells.len() {
s.done = true;
}
}
}To verify: run the time-sliced version across K ticks with max_cells = total_cells / K. Compare with a single-pass search. The results must be bit-identical because both visit the same cells in the same order.
Exercise 4 - Out-of-loop AI
#![allow(unused)]
fn main() {
use std::sync::mpsc::{channel, Receiver, Sender};
use std::thread;
fn spawn_ai(world_snapshot_rx: Receiver<WorldSnapshot>, ev_tx: Sender<InputEvent>) {
thread::spawn(move || {
while let Ok(snapshot) = world_snapshot_rx.recv() {
let strategy = compute_counter_strategy(&snapshot); // takes seconds
let _ = ev_tx.send(InputEvent::StrategyUpdate(strategy));
}
});
}
}The simulator’s tick:
#![allow(unused)]
fn main() {
if world.tick % 30 == 0 {
let _ = world_snapshot_tx.try_send(snapshot_of(&world));
}
// Drain any AI results from the input queue
for ev in world.in_queue.drain(..) {
apply_input(&mut world, ev);
}
}Time the simulator’s tick rate. With the AI computation taking 5 seconds and the simulator running at 30 Hz, the simulator should sustain its full 30 Hz throughout - the AI thread does not block the tick. The strategy update arrives 5 seconds after the snapshot was sent and lands in the input queue at the tick boundary it arrives at.
Exercise 5 - Mixed cadence with determinism
The key insight: each cadence is itself deterministic if its trigger is deterministic. “Every 50 ticks” is a deterministic trigger (if tick % 50 == 0). An “out-of-loop AI” is harder - its results depend on wall-clock timing and may not be reproducible.
For a deterministic system with out-of-loop work, treat the AI’s results as part of the input log. Replay re-feeds the same results at the same ticks they originally arrived. The simulator stays deterministic; the AI’s computation is no longer in the loop, but its inputs are.
Test:
#![allow(unused)]
fn main() {
let mut w1 = init_world(0xCAFE);
let mut w2 = init_world(0xCAFE);
for tick in 0..1000 {
w1.in_queue.extend(recorded_inputs[tick].iter().cloned());
w2.in_queue.extend(recorded_inputs[tick].iter().cloned());
tick_with_mixed_cadence(&mut w1, recorded_time[tick]);
tick_with_mixed_cadence(&mut w2, recorded_time[tick]);
}
assert_eq!(hash_world(&w1), hash_world(&w2));
}If determinism holds, the cadences compose; if not, an out-of-loop result is leaking non-determinism that the input queue did not capture.
Exercise 6 - Anytime under varying budget
#![allow(unused)]
fn main() {
fn step(world: &mut World, plan_budget: Duration) {
let deadline = Instant::now() + plan_budget;
for creature_id in world.planning.iter() {
let i = *creature_id as usize;
let route = plan_route(world, world.creatures.px[i], world.creatures.py[i],
world.goal_px[i], world.goal_py[i], deadline);
world.routes[i] = route;
}
}
}The remaining-tick budget is what is left after the higher-priority systems have run. Some ticks: 10 ms remaining, plenty for path-finding. Other ticks: 0.5 ms, only enough for greedy answers. The path-finder returns a valid path in both cases; quality varies; the simulator never blocks.
Plotting route_quality(t) over many ticks shows quality oscillating with budget, with steady-state quality reflecting the typical budget. The pattern is the simulator’s response to load - when the system is busy, planning gets less time; when idle, more time. No system is ever starved or stalled.
40 - Mechanism vs policy
Concept node: see the DAG and glossary entry 40.
|
|
Note - Building it to last. Sections 1-39 made the simulator work - deterministic, scaled, parallel, persisted. These four chapters make it last. They are still act one - building - but they answer the questions you ask of a thing you intend to keep: is it extendible (can it grow without a rewrite), is it maintainable (can someone who is not you change it safely), and does it hold its performance and its memory as it grows. Mechanism vs policy, deferred abstraction, dependency pricing, and tests-are-systems are the discipline for those four. The fifth question - can you operate it in service, with nobody watching - is the second act, and it opens at §45. Mechanism vs policy is where the discipline starts: a kernel you can keep is a kernel whose rules can change without it. |
The kernel of a system exposes verbs. The rules - what’s allowed, what triggers what - live at the edges. Confusing the two is how systems calcify; once a kernel knows about a rule, the rule cannot change without rewriting the kernel.
The principle is older than ECS. It is named in operating-system kernel design (Mach, X11, Plan 9 all teach this rule), in network-protocol design (TCP is mechanism, congestion control is policy), and in file-system design (read/write/seek is mechanism, access control is policy). The same shape applies to ECS systems.
In the simulator:
cleanupis mechanism. It takesto_removeandto_insert, applies them viaswap_removeandpush, and updatesid_to_slot. It has no opinion about which creatures should be removed or why. It just commits the changes its callers asked for.apply_starveis policy. It readscreature.energyand pushes ids of creatures withenergy <= 0toto_remove. The rule “creatures die when energy reaches zero” lives here. Change the rule toenergy < -10orenergy < threshold for 100 ticksand onlyapply_starvechanges; cleanup stays the same.
The separation pays off in three places.
Replaceable rules. A new gameplay variant - “creatures don’t die, they hibernate” - is a new policy on top of unchanged mechanism. apply_starve becomes apply_hibernate; cleanup still works because cleanup does not know what these systems are doing. The kernel is stable; rules are mobile.
Composable rules. Two policies acting on the same kernel compose: one system marks “expired” creatures, another marks “predated” creatures. Both push to to_remove. Cleanup applies both batches without knowing why either was set.
Testable rules. A test fixture sets up to_remove and to_insert directly, runs cleanup alone, and asserts on the result. The mechanism is testable in isolation. Each policy’s test fixture sets up creatures and asserts on what the policy pushes to the buffer. Mechanism tests and policy tests don’t need each other.
The anti-pattern: a food_spawn that mutates food directly:
fn food_spawn(food: &mut Vec<Food>, /* ... */) {
if some_condition {
food.push(/* ... */); // BUG: bypasses to_insert
}
}Now food_spawn is doing both the deciding (when food appears) and the committing (writing to food). Two changes need rewriting it: a new spawn rule (policy change) and a new cleanup mechanism (mechanism change). They have become the same change. The kernel is married to its current rule.
The fix is to push to to_insert instead, letting cleanup commit. The two roles are separable because they were designed to be - through the buffering pattern from §22, which is itself a mechanism-vs-policy separation. The mechanism is “apply changes at the boundary”; the policy is “what changes to apply”.
Mechanism vs policy is therefore not a separate discipline. It is the rule that every previous chapter has been respecting implicitly. Naming it makes it visible.
Exercises
- Find the mechanism. For each system in your simulator (motion, food_spawn, next_event, apply_eat, apply_reproduce, apply_starve, cleanup, inspect), classify: is this mechanism (committing what something else asked for), policy (deciding what to ask for), or both? Note where each role lives.
- Replace a policy. Change
apply_starve’s rule fromenergy <= 0toenergy < -10 && age > 100. Confirm: onlyapply_starvechanges;cleanupstays untouched. - Add a new policy on the same mechanism. Write a new system
apply_predationthat pushes ids of “predated” creatures (some other rule) toto_remove. The two policies’ outputs both flow to cleanup, which applies them without distinction. - Spot the anti-pattern. Find any place in your simulator where a system writes directly to a “live” table instead of to
to_insertorto_remove. Refactor. - (stretch) A second mechanism. Suppose you want a “soft delete” - creatures move to a
deadtable instead of being removed. Implement a new mechanism (cleanup_with_archive) without touching the existing policies. The sameto_removeids; different mechanism applied. Switch between them by swapping the system in the DAG, not by editing the systems that produce the data.
Reference notes in 40_mechanism_vs_policy_solutions.md.
What’s next
§41 - Deferred abstraction is the discipline for writing the kernel-and-policies in the first place: write three concrete cases before extracting any abstraction.
Solutions: 40 - Mechanism vs policy
Exercise 1 - Find the mechanism
| system | mechanism | policy |
|---|---|---|
motion | apply position + velocity update | none (velocity comes from elsewhere) |
food_spawn | none | when and where food appears |
next_event | compute next collision/event time per creature | the event categorisation rules |
apply_eat | apply consumption mechanics | eats rule (collision detection) |
apply_reproduce | apply fission, split fuel | reproduction threshold and offspring count |
apply_starve | mark for removal | starvation rule (energy <= 0) |
cleanup | apply mutations | none (pure mechanism) |
inspect | read world state | none (pure mechanism for observation) |
cleanup is the cleanest mechanism in the simulator: no decisions, just commits. inspect is the cleanest read-only mechanism. apply_starve and apply_reproduce are mostly policy with a thin mechanism layer.
Exercise 2 - Replace a policy
#![allow(unused)]
fn main() {
fn apply_starve(/* ... */) {
for i in 0..energy.len() {
if energy[i] < -10.0 && age[i] > 100 { // changed from `<= 0.0`
to_remove.push(ids[i]);
}
}
}
}cleanup does not change. The simulator behaves differently; the kernel is unmoved. This is the test of separation: did the change touch only one file?
Exercise 3 - Add a new policy
#![allow(unused)]
fn main() {
fn apply_predation(/* ... */) {
for i in 0..creatures.len() {
if is_predated(creatures[i], world) {
to_remove.push(ids[i]);
}
}
}
}Both apply_starve and apply_predation push to to_remove. Cleanup applies the union without distinction. The two policies compose because they produce the same shape of output (an id to remove); the mechanism does not care why.
Exercise 4 - Anti-pattern
Common offender: a logger system that writes directly to disk inside the system body, rather than pushing to an output queue. It mixes “decide what to log” (policy) with “write to disk” (mechanism). Refactor the disk write into a queue + cleanup-style flush.
Exercise 5 - A second mechanism
A cleanup_with_archive mechanism reads to_remove and, instead of swap_remove-ing the row, copies it into a dead archive table before removing it from creatures. Policies (apply_starve, apply_predation) are unchanged - they still push to to_remove. Switch between the two mechanisms by swapping which one is in the DAG, not by editing any policy.
41 - Deferred abstraction
Concept node: see the DAG and glossary entry 41.
The instinct most programmers acquire from training is abstract early. See a case; imagine the second case; design an interface that handles both. The early abstraction feels tidy. It also breaks down the moment the third or fourth case turns out not to fit.
The data-oriented discipline is the opposite. Write the concrete case three times before extracting anything. Then look at the three concrete versions and ask whether the abstraction that fits all three is obvious. Often it is, and the extraction is mechanical. Sometimes it is not - the three cases share less than expected, and the right move is to leave them concrete.
Walk through the failure mode. You write the simulator’s motion system. You can already see motion would also apply to food drift, particle effects, projectile trajectories. The instinct says: design a generic Movable interface. The discipline says: don’t yet. Write motion. Move on.
When the second case arrives - say, food drift - you write it concretely. Maybe it shares 80 % of motion’s structure. Maybe only 60 %. You see this clearly because both versions exist as concrete code, not as imagined cases.
When the third case arrives, look at all three. Now the shared structure is measured, not imagined. If the abstraction is obvious, extract it. If the three cases share only a vague shape, leave them. A bad abstraction is more expensive than three concrete versions of similar code.
The cost saving is in the avoided abstractions. A library of premature interfaces - Movable, Mortal, Hungry, Reproductive trait hierarchies - is a library of code-shaped scar tissue. Each interface fits some of its uses well and others poorly. The misfits add casts, downcasts, defaults, and special cases. Concrete code has none of these.
The Rust ecosystem demonstrates deferred abstraction repeatedly. std::iter::Iterator is the abstraction over many concrete iteration patterns; it earned its place because the concrete patterns existed first and were obviously shared. serde is the abstraction over serialisation; it earned its place because every serialisation library was writing the same boilerplate before serde existed. These abstractions feel inevitable because they are generalizations of patterns the community had already written by hand many times.
The discipline is structural, not stylistic. Generalize when you can see the shape, not before. The book’s own through-line uses it. The simulator was built one concrete piece at a time. The DAG was named after the systems were built, not before. The trunk vocabulary is the generalization of patterns that actually emerged.
A useful test: after extracting an abstraction, can the abstraction handle a fourth case without a special branch? If yes, the abstraction is real. If no - if the abstraction grew an if-else for the fourth case - the abstraction was wrong, and the fourth case is the case showing it.
The connection to the next chapter is concrete. A third-party library is somebody else’s abstraction - one they generalized from their concrete cases. If your three concrete cases match theirs, the library fits and adopting it saves real work. If they do not, the library is friction at every use. §42 develops this into the dependency-pricing discipline.
Exercises
- Find a too-early abstraction. Look at code you have written. Find a generic function or trait that has fewer than three concrete uses. Could it be inlined? Often the answer is yes; the abstraction was speculative.
- Three concrete versions. Write
filter_creatures_by_hunger,filter_creatures_by_age,filter_creatures_by_location. Three independent functions. Look at them. Is there an obvious shared abstraction? - Resist extraction. Even with an obvious abstraction in exercise 2, ask: do the three concrete versions read more clearly as concrete versions? In some cases yes - a four-line specific function is more legible than a generic
filter_bywith a closure. - Add a fourth case. Suppose you also want
filter_creatures_by_proximity_to_food. Does this fit the abstraction from exercise 2? If yes, the abstraction holds. If no (the proximity calculation needsfood, which the others do not), the abstraction was a tight fit, and the fourth case requires either a new abstraction or a different concrete shape. - (stretch) A library audit. Look at one Rust crate you have used. Identify the abstractions it offers. For each, ask: does it match three or more concrete cases that came before it, or is it an abstraction of one case generalised on speculation? The answer says whether the crate is a real generalization or a guess.
Reference notes in 41_compression_oriented_solutions.md.
What’s next
§42 - You can only fix what you wrote extends deferred abstraction to dependencies: every crate is somebody else’s abstraction; adopting it is a bet that their generalization matches yours.
Solutions: 41 - Deferred abstraction
Exercise 1 - Too-early abstraction
Look for traits with one impl, generic functions with one caller, or enum-shaped types with single-variant patterns. Each is a candidate for inlining. The test: what would the code look like if you removed the abstraction? Often it is clearer.
Exercise 2 - Three concrete versions
#![allow(unused)]
fn main() {
fn filter_by_hunger(creatures: &[Creature], threshold: f32) -> Vec<u32> {
let mut result = Vec::new();
for c in creatures {
if c.energy < threshold { result.push(c.id); }
}
result
}
fn filter_by_age(creatures: &[Creature], max: u32) -> Vec<u32> {
let mut result = Vec::new();
for c in creatures {
if c.age > max { result.push(c.id); }
}
result
}
fn filter_by_location(creatures: &[Creature], region: Region) -> Vec<u32> {
let mut result = Vec::new();
for c in creatures {
if region.contains(c.pos) { result.push(c.id); }
}
result
}
}Three independent functions. The obvious shared abstraction is filter_by(predicate: impl Fn(&Creature) -> bool). But - read them again. Each is four lines. The abstraction would be one line at each call site. Is the saving worth the indirection?
Exercise 3 - Resist extraction
For four-line functions, the concrete versions are often more legible. The extracted filter_by(creatures, |c| c.energy < HUNGER) is the same length but adds a closure. The reader has to parse the closure to know what is being filtered.
The abstraction earns its place when:
- The caller would write the same closure many times.
- The closure is non-trivial.
- There are five or more concrete cases of the same shape.
For three small cases, leave them concrete.
Exercise 4 - A fourth case
filter_creatures_by_proximity_to_food takes both creatures AND food. The signature fn filter_by(creatures: &[Creature], pred: F) cannot express it without smuggling food through a closure capture. Two options:
- Pass
foodthrough a closure:filter_by(creatures, |c| food.iter().any(|f| close(c.pos, f.pos))). Works, but ugly. - Recognise this as a different shape (a join, not a filter) and write it as its own concrete function.
The fourth case shows the abstraction’s limits. A real shared structure would handle it without a special branch.
Exercise 5 - Library audit
Open-ended. Look at any crate’s exported API. For each function or trait, ask: how many concrete cases preceded this in the ecosystem? Often you will find:
- The 5+ cases that justify it (
std::iter::Iterator,serde::Serialize). - The single speculative case (a one-off DSL with no second user).
- The middle: 2-3 cases, possibly real, possibly the author’s domain.
The clarity of the answer says how robust the abstraction is.
42 - You can only fix what you wrote
Concept node: see the DAG and glossary entry 42.
Foreign libraries are allowed in this book. They are not banned. They are priced.
Every dependency is a bet. The bet is that someone else will keep the library working - fix bugs, ship versions, respond to security issues, support future Rust releases, not abandon the project. The bet has a cost: if the library breaks, you cannot fix it. You can only replace it, fork it, or live with the breakage.
The discipline is to take the bet consciously, knowing how much code the dependency saves you and how much risk it carries.
Walk through what risk looks like.
The leftpad incident. An eleven-line npm package was unpublished by its author over a naming dispute, and broke thousands of build pipelines worldwide. The package did padding by repeated string concatenation. Every project that depended on it was, structurally, depending on someone else’s emotional state.
Major-version cascade. A transitive dependency makes a breaking change. Your code does not change. The dependency’s dependency does. The build is now broken, sometimes for days, while you wait for an upstream fix or pin a workaround. You have lost agency over your own build.
The slow fade. A crate works in production for two years, then its author switches careers, the crate stops getting updates, and a future Rust release deprecates a feature it relies on. The crate still compiles for now, but its days are numbered. Migration is on you.
These are not edge cases. They are the typical lifecycle of a dependency relationship. Some libraries beat the curve - serde, tokio, rayon - because they are maintained by ecosystems too large to fail. Most do not.
The discipline that follows from this is not “use no dependencies”. It is:
- Write the from-scratch version first. If it is fifty lines and two hours, often you do not need the dependency at all. The from-scratch version is also the calibration: how much code does the crate actually save?
- Read the dependency’s source. Not the docs - the source. How much code is it? Who maintains it? What’s its history? Is it actively maintained or coasting?
- Decide consciously. Adopt for the right reasons (genuine code savings, ecosystem alignment, escape from your own bug-prone reimplementation). Reject for the wrong reasons (it is there, it is popular, no one questioned it).
A useful classification by size:
- Trivial (a few hundred lines or less). Easy to fork, easy to inline. Often easier to write yourself than to take the dependency.
- Small (around a thousand lines). Forkable in a day or two. Reasonable to depend on; reasonable to vendor.
- Mid-size (a few thousand lines, e.g.
slotmap). Forkable but a real commitment. Adopt cautiously; have a migration plan. - Ecosystem-scale (many thousands of lines, large team -
tokio,serde). Not realistically forkable. Adoption is a commitment to the ecosystem; pretending otherwise is the bug.
The book’s through-line example: slotmap. It implements the generational arena pattern from §10 plus §23. Most simulators benefit from it because the from-scratch version is non-trivial. But the from-scratch version is also small enough - a few hundred lines for the core operations - that you could fork and own it if needed. That balance - small enough to fix, complex enough to want - is the sweet spot.
The opposite end is tokio. Adoption is a commitment to the maintainer team. For most projects this is fine - the team is competent and the ecosystem is durable. But the commitment is real.
The middle ground is uncomfortable. A 2 000-line single-author crate that is exactly what you need: too big to fork comfortably, too small for ecosystem support. Adopt cautiously; consider vendoring (copying into your repo); be ready to maintain.
The book’s discipline lives at this evaluation. Not “no deps” - “consciously chosen deps, sized to the maintenance you can do”.
Exercises
- Audit your
Cargo.toml. For each direct dependency, classify by the size categories above. The small ones are easiest to fork; the ecosystem-scale ones are too big to fork. - The from-scratch test. Pick one mid-size or small dependency. Estimate: how long would it take to write the relevant 80 % of it from scratch? If less than two days, you have an alternative - keep it in mind for the day the dependency breaks.
- A breakage drill. Pick one dependency. Pretend it is unmaintained. What is your migration path? (Fork? Replace? Live with the bug?) Write the answer in your project’s README or
CONTRIBUTING.md. The drill is cheap; the breakage is not. - Small over big. When two crates do the same job, prefer the smaller. A small crate is forkable; a large one usually is not. The bigger crate’s extra features are someone else’s needs, not yours.
- (stretch) Vendoring. Copy one small crate’s source into
vendor/fooin your repo. UpdateCargo.tomlto usepath = "vendor/foo". The crate is now under your control. Future breakages are yours to fix; future improvements are yours to apply. The trade is more work for more agency. Document the decision so future maintainers know why.
Reference notes in 42_you_can_only_fix_what_you_wrote_solutions.md.
What’s next
§43 - Tests are systems; TDD from day one is the closing discipline: tests are not a separate framework, they are systems. The same shape that runs the simulator runs its tests.
Solutions: 42 - You can only fix what you wrote
Exercise 1 - Cargo.toml audit
For a typical Rust project’s direct dependencies, the classification might look like:
| dependency | size category | notes |
|---|---|---|
serde | ecosystem-scale | not realistically forkable |
tokio | ecosystem-scale | not realistically forkable |
rayon | mid-size | could fork; sizable but coherent |
slotmap | mid-size | could fork; core is a few hundred lines |
crossbeam-utils | small | forkable in a day |
small_helper | trivial | could be inlined |
The classification reveals which dependencies are bets you have already made (and cannot easily walk back) versus which are bets you can still walk away from.
Exercise 2 - From-scratch test
For slotmap: the core (slot allocator, generation counter, get/insert/remove) would be a few hundred lines of Rust. Plausibly a day or two of focused work. If slotmap ever became unmaintained, this is your migration path.
For tokio: not realistically replaceable. Adoption is a commitment to the ecosystem.
The exercise’s value is calibration: how much code does each dependency actually save?
Exercise 3 - Breakage drill
Possible answers for various scenarios:
- Trivial dependency unmaintained: inline its source, remove from
Cargo.toml. ~1 hour. - Small dependency unmaintained: fork it; it’s small enough to vendor and own. ~1 day to integrate.
- Mid-size dependency unmaintained: evaluate alternatives; fork as fallback; budget ~1 week to migrate.
- Ecosystem dependency breaks: wait for ecosystem fix; pin the working version; budget weeks to a month for community to respond.
Documenting these answers up front is cheap. Discovering them under pressure is expensive.
Exercise 4 - Small over big
Two crates that do the same job: easy_thing (5 000 lines, 50 features) and simple_thing (500 lines, 5 features). If you only use the 5 features, prefer simple_thing. The smaller crate is easier to read, easier to fork, easier to vendor, easier to debug.
The bigger crate’s extra features are someone else’s needs, not yours. They are dependency mass without value.
Exercise 5 - Vendoring
[dependencies]
foo = { path = "vendor/foo" }
After copying the crate’s source into vendor/foo/ and updating Cargo.toml, the crate is now part of your repo. You can edit it, fix bugs, simplify it, drop unused features. The trade: you have taken on maintenance. Your crate builds always work; it is also your problem when something breaks.
For small crates with stable APIs, vendoring is often the right move. For ecosystem crates, it is not. Document the decision in the project’s README so future maintainers know which crates are vendored and why.
43 - Tests are systems; TDD from day one
Concept node: see the DAG and glossary entry 43.
A test reads the world’s state and asserts that some property holds. A system reads the world’s state and writes a derived result. The two are structurally the same.
This is not a slogan. It is the structural fact that lets every other discipline in the book apply to tests without translation.
A test fixture is the world at some tick. A test is a system whose write-set is empty, or whose write-set is a small “report” table. A test runner is the same scheduler that runs the simulator, executing the test’s read-set against the world.
#![allow(unused)]
fn main() {
fn no_creature_moves_too_far(
px_before: &[f32], py_before: &[f32],
px_after: &[f32], py_after: &[f32],
max_step: f32,
) -> Vec<(usize, f32)> {
let mut suspicious = Vec::new();
for i in 0..px_before.len() {
let dx = px_after[i] - px_before[i];
let dy = py_after[i] - py_before[i];
let dist = (dx * dx + dy * dy).sqrt();
if dist > max_step {
suspicious.push((i, dist));
}
}
suspicious
}
}This is a system. Read-set: pos_before, pos_after, max_step. Write-set: a report Vec. It runs over the simulator’s tables. It asserts a property. It can run as part of the DAG (in test mode) or in production (as an inspection system). The same code path serves both uses.
Three benefits compound.
Property tests over component arrays fall out. A property test fixes an RNG seed, runs the simulator for N ticks, and asserts that some property holds at every tick. If the property is “no creature moves more than max_step per tick”, the assertion is the system above. If it is “the population stays bounded”, the assertion is count(creatures) < bound. Each is a system.
Replay tests over event logs fall out. A replay test loads a recorded log, runs the replayer, and compares the resulting world to a snapshot. The “test” is the comparison; the comparison is a system over both worlds’ tables.
Integration tests do not need mocks. A mock exists because the test cannot exercise the real component. The boundary-as-queue rule from §35 means there are no external components inside the simulator - every external interaction goes through the queues. A test fills the in-queue with synthetic input, runs the simulator, asserts on the out-queue. No mocks; the test reads the same data the simulator reads.
The TDD-from-day-one piece is what makes this practical. From §5 onward, every concept in the book is approached test-first. What’s the smallest case? What’s the largest? What should the answer be for u8, for u32, for 10 000 agent ids? The deck-game exercises start by asking “what should this return for a deck of 0 cards, of 1, of 52?” The simulator’s exercises ask “what should population be after 100 ticks of zero food?” Tests come first; implementation follows.
The discipline pays off three ways:
- Tests grow with the code. Each new system has its tests as adjacent functions, sharing the same read/write conventions. A test refactor is no different from a system refactor.
- Inspection and testing are the same code. The InspectionSystem pattern from §13 is identical to the test pattern: read-only access to all tables, output a report. In production, inspection is absent; in test, it is present and asserting. Same source code, different schedule.
- Determinism makes tests trustworthy. §16’s rule means tests are reproducible. A test that fails with seed
0xCAFEfails with0xCAFEevery time, on every machine. No flakiness.
Tests are systems - and so is the budget
A test asserts a property of logic and passes or fails. Cost wants the same vigilance but cannot take that form: you cannot assert “this tick takes under 33 ms” as pass or fail, because a wall-clock number carries the machine, the scheduler, and the thermal state - run it twice and it disagrees with itself. The cost side is a benchmark, not a verdict. The analogy is still exact, unit test : logic :: scale sweep : cost: a scale sweep is a test-shaped system aimed at cost. Run each system across log-spaced scales, take the minimum of a few repetitions at each (the OS only ever adds time, so the minimum is the machine’s floor with interference subtracted out), and watch where each curve crosses the budget. The system that crosses first is the binding constraint; improve it, re-sweep, watch the crossing move out. You characterise the envelope rather than assert a threshold - the one falsifiable, one-sided claim is that even the unimpeded minimum exceeds the budget, which is definitively too slow; everything above that floor is variance, read as a curve and not a red light.
Two habits keep the sweep honest, and both are where intuition lies. You do not know where the time goes - the hotspot is as often a sort you did not need as the arithmetic you expected - so you profile to find the binding line rather than guess it. And a benchmark that does not grow the way production grows reports a confident, precise, wrong number; scale it on the axis the system actually will, or it lies with a chart attached. The per-chapter measurements in this book are the baseline of that envelope: “the dense bin streams,” “the representative holds linear” are not claims you trust once but curves you watch hold as the code changes. Measurement, made a tracked instrument rather than a one-time exhibit.
The book is closing.
Forty-two concepts; nine phases; one through-line simulator. The disciplines named in this last phase - mechanism vs policy, deferred abstraction, you-can-only-fix-what-you-wrote, tests-are-systems - are the rules that hold the rest together. They are not new architecture. They are how the architecture earlier chapters built stays maintainable.
A simulator that respects all forty-three nodes is one whose state is in tables, whose transformations are systems, whose tick is a pure function, whose history is a log, whose persistence is transposition, whose tests are systems, and whose dependencies are bets you took with your eyes open.
That is the data-oriented program. That is the book.
Exercises
- A test as a system. Take the
no_creature_moves_too_farsystem from the prose. Add it to your simulator’s DAG behind a--testflag. Run for 100 ticks. The system should report zero suspicious creatures. - A property test. Run the simulator for 1000 ticks with seed
0xCAFE. Assert:population <= 2 * initial_population. Run twice with the same seed; both runs should report the same outcome (passing or failing at the same tick). - A replay test. Save the in-queue of a 100-tick run. Load it into a fresh simulator and replay. After 100 ticks, hash both worlds. They must match.
- TDD a new system. Pick a piece of behaviour you have not built - say, “creatures with energy above 50 grow more slowly”. Write the test first: what’s the smallest case (one creature)? Largest (a million)? Then write the system. Confirm the test passes.
- The InspectionSystem connection. Take the test from exercise 1 and the inspection-system idea from §13. Argue why they are structurally identical - same read-set, same lack of write-set, same scheduling slot.
- (stretch) A test runner that is the simulator’s scheduler. Implement a tiny test runner whose only difference from the simulator’s scheduler is which systems it includes in the DAG: production systems for live runs, test-and-inspection systems for test runs. The two binaries share most of their code; the difference is the systems list.
- The scale sweep (a test for cost). Time one system across log-spaced scales (10K, 100K, 1M), taking the minimum of three repetitions at each. Lay your budget across the curve and find the scale where it crosses. Then make the same measurement lie: hold one input fixed while growing another so a hidden quantity (density, fan-out) stays constant, and watch the curve flatten into a falsely linear shape. State the axis a sweep must grow on for your system, and the one falsifiable claim a wall-clock number actually supports.
Reference notes in 43_tests_are_systems_solutions.md.
What’s next
You have closed the trunk. §44 - What you have built looks back at the shape of what you built and opens the questions the book deliberately did not settle.
Solutions: 43 - Tests are systems
Exercise 1 - A test as a system
Add no_creature_moves_too_far to your simulator’s DAG behind a --test flag:
#![allow(unused)]
fn main() {
if cfg.test_mode {
let suspicious = no_creature_moves_too_far(
&world.px_before, &world.py_before,
&world.creatures.px, &world.creatures.py, MAX_STEP);
assert!(suspicious.is_empty(), "{:?}", suspicious);
}
}In live mode, the system is absent. In test mode, it runs every tick. Same code path; different schedule.
Exercise 2 - Property test
#![allow(unused)]
fn main() {
let mut world = init_world(0xCAFE);
let initial = world.creatures.len();
for _ in 0..1000 {
tick(&mut world, 0.033);
assert!(world.creatures.len() <= 2 * initial);
}
}Run twice. Both runs report identical assertion outcomes (because of §16). If the property fails, both runs fail at the same tick.
Exercise 3 - Replay test
#![allow(unused)]
fn main() {
let recording = run_and_record(&mut world1, 100);
let mut world2 = init_world(seed);
for inputs in &recording {
world2.in_queue.extend(inputs.iter().cloned());
tick(&mut world2, /* recorded current_time */);
}
assert_eq!(hash_world(&world1), hash_world(&world2));
}Replay and live run produce bit-identical states. The test is assert_eq!; the test fixture is the recorded queue.
Exercise 4 - TDD a new system
Test first:
#![allow(unused)]
fn main() {
fn test_growth_slows_at_high_energy() {
let mut world = init_one_creature_with_energy(100.0);
let initial = world.creatures.size[0];
for _ in 0..10 { tick(&mut world, 0.033); }
let final_size = world.creatures.size[0];
assert!(
final_size - initial < HIGH_ENERGY_GROWTH_RATE * 10.0,
"growth too fast at high energy"
);
}
}The test states what the system should do. Then write the system. Then watch the test pass. The order matters: writing the test first forces you to specify the behaviour before implementing it.
Exercise 5 - InspectionSystem connection
Both:
- Read all relevant tables (
&borrows everywhere) - Have empty (or report-only) write-sets
- Run last in the DAG (after all mutations have settled)
- Produce reports for consumption outside the simulator
The only difference: an InspectionSystem reports state to a debug consumer (pptop, an IDE, a log). A test reports assertion results to a test runner. Same shape; different consumer.
Exercise 6 - Test runner = simulator scheduler
The simulator’s main:
fn main() {
let mut world = init_world(seed);
let scheduler = build_schedule(&[
food_spawn,
motion,
next_event,
apply_eat, apply_reproduce, apply_starve,
cleanup,
// inspect: present in --debug only
]);
loop { scheduler.tick(&mut world); }
}The test runner:
#![allow(unused)]
fn main() {
fn test_main() {
let mut world = init_world(seed);
let scheduler = build_schedule(&[
food_spawn,
motion,
next_event,
apply_eat, apply_reproduce, apply_starve,
cleanup,
check_no_creature_moves_too_far, // assertion system
check_population_bounded, // assertion system
inspect, // and inspect
]);
for _ in 0..1000 { scheduler.tick(&mut world); }
}
}The two binaries differ in which systems they include. The scheduler, the world, and every system itself is the same code. Most of the binary is shared.
Exercise 7 - The scale sweep (a test for cost)
The minimum of repetitions, not the mean: interference (a scheduler tick, a migration, a thermal blip) only ever adds time, so the smallest sample is the closest you get to the machine’s intrinsic cost. The mean drags toward whatever else the box was doing; the minimum is the one statistic stable enough to compare across runs and machines.
Laying the budget across the curve, the crossing scale is the system’s ceiling. It is a curve to read, not a threshold to pass: the only one-sided, falsifiable claim a wall-clock number supports is that even the unimpeded minimum is over budget - then it is definitively too slow. Anything where the minimum is under and the mean is over is a measurement under variance, not a failure.
Making it lie is the lesson. Hold foragers fixed and grow only targets, and forager density stays constant, so the binned neighbourhood stays small and the curve looks linear - while the real system, growing both, is quadratic. The axis a sweep must grow on is the one production grows on; a sweep on any other axis reports a confident, precise, wrong number, and you believe it because it came with a chart. A benchmark that does not scale the way the system scales is worse than none.
44 - What you have built
The previous forty-three sections were a long climb. This one is a look down.
You have built a small ecosystem simulator that runs deterministically, scales from one hundred creatures to streaming workloads, and exposes its state to inspection at every tick. You did this with Vecs and functions - no inheritance, no traits unless you wanted them, no framework. The discipline that made it work is the entire content of the book.
The shape that carried the whole thing
Three patterns showed up everywhere:
Tables, not objects. A creature is not a struct of fields with methods. It is a row across columns kept aligned by index - pos[i], vel[i], energy[i]. Each column is a Vec. The columns have one writer each; they grow and shrink in lockstep. There is no container holding them together - only the discipline.
Systems, not state. Behaviour is a function over tables. motion reads vel, writes pos. apply_starve reads energy, pushes ids to to_remove. Each system has a name, a read-set, a write-set. The simulator is the DAG of systems composed in order. State changes happen between ticks, not inside them.
Mechanism separated from policy. The kernel exposes verbs (insert, remove, swap, push to buffer, batched cleanup). The rules live at the edges (when does a creature die, when does food spawn, what counts as a collision). The same kernel runs every variation; the policies change without it.
Those three are not Rust-specific. They are not even ECS-specific. They are what data-oriented design names. The rest of the book - locality, parallelism, persistence, anytime algorithms - falls out of taking those three seriously.
What this approach buys
- Speed by default, because the layout matches the machine.
- Determinism without locks, because ordering is the contract.
- Testability, because each system is a pure function over its inputs.
- Onboardability, because the data is visible. A reader can
print!every column and see the world. - Refactor cheap, because there are no objects with hidden state to migrate.
What this approach costs
- Less abstraction. You feel the machine. Some find this freeing; some find it exhausting.
- More discipline. Single-writer rules, mutation buffering, lockstep sorts - the language does not enforce these. You do.
- Less idiomatic Rust. The book uses very little of Rust’s type system: traits, lifetimes, and generics appear when they pay rent and not before. Idiomatic Rust looks different.
- A different mental model. Engineers trained in OOP will not naturally reach for tables. The translation cost is real.
Two acts: building it, and living with it
Read back, the book has two acts. The first is building something that works, and lasts. Sections 1-39 made it run - deterministic, scaled from a hundred creatures past the million-entity wall, parallel on disjoint writes, persisted and replayable. Sections 40-43 made it durable to change: mechanism vs policy, deferred abstraction, dependency pricing, tests-are-systems - the discipline that holds four of the five costs of ownership: extendibility, maintainability, performance, and memory.
The second act is living with it once it is in service - a different question entirely. The fifth cost of ownership, operations - recovering it, observing it, trusting it across machines and deadlines - only bites when the system is deployed and the human who used to watch it is gone. That act begins in §45.
Open questions the book did not settle
The book made choices. Other books make different ones. Worth knowing where you sit:
- Why not Bevy, specs, or another existing ECS framework? Faster to start, harder to see through. We did the slow thing on purpose. After §43 you can read Bevy’s ECS source and tell whether its choices match yours.
- Is a row really better than a struct? For a single creature, no. For a million, yes. The crossover depends on your workload; §3 names the tradeoff but does not prescribe.
- Could this have been C, or Zig? Yes. The ideas are language-independent. Rust contributes the borrow checker and zero-cost abstractions; the rest is layout discipline.
- What about networking and rollback? §31-§34 covers single-machine concurrency. Distributing the world across machines is a different book - see Glenn Fiedler’s GDC talks for the rollback-netcode pattern.
- What about types and traits? Two of Rust’s three big features barely appear in the trunk. Future work might explore where generics and traits do pay rent in an ECS - usually at the boundary (serialisation, debug rendering) rather than the kernel.
The horizon: living with it at production scale
The list above is choices of taste - other books choose differently. This list is not. It is where what the first act built leaves a real gap the moment the system is in service. Turning a deterministic in-memory simulator into a system you ship, evolve, observe, and recover is the next mile - and the second act sets out on it. Each gap is named here against the criterion it threatens; together they are the map of the road ahead.
- Schema evolution (extendibility). §36 versions a save with a header byte. Renaming a column, splitting one, changing a unit, back-filling a derived column - each is a project, not a paragraph. The fast column-direct format makes every file in the wild a hostage to today’s layout. The triple-store of §37 is the start of a fix; schema-as-data - a column registry and a forward/back migration runner - is the rest.
- Crash consistency (operations). “The log is the world” holds only while the log survives power loss. Torn writes, fsync barriers, atomic rename, idempotent replay after a half-written batch - §38 names fsync once and stops. For a save-game that is fine; for a system of record it is the whole problem.
- Numerical determinism under parallelism (operations). The parallel-reduction gotcha named in §16: same seed, different thread count, different bits. Replay across heterogeneous hardware needs a fixed reduction order or integer accumulation, not just “no threads inside a system”.
- Observability (operations). “The data is visible;
print!every column” is a debugger’s story, not an on-call engineer’s at 2 AM. Metrics, tracing across queue boundaries, structured logs, and alerting want to be read-only systems whose write-set is a metrics table the storage system ships out beside the log. - Hard real-time (operations). §39’s anytime algorithms are soft real-time: a missed deadline costs quality. Hard real-time - where a missed deadline is a fault - needs WCET analysis, bounded jitter, and no allocation in the inner loop. A different discipline layered on top.
- Heterogeneous compute (performance). SoA is the precondition for SIMD, GPU offload, and accelerators; the book makes the precondition and stops at one core’s bandwidth. For all-pairs shortest paths on a million-node graph, the next bus is the difference between thirty minutes and thirty seconds. Its cost model - transfer bandwidth and kernel-launch latency - deserves the same dollars-and-cents treatment §4 gives the cache hierarchy.
- Where SoA does not pay (memory, maintainability). The simulator’s domain - things with positions and a few scalars - is unusually friendly to columns. Recursive structures dominated by topology rather than slot order, very small N where pointer-chasing’s constant factor wins, and APIs that must hand structured rows to non-ECS consumers are where columns can cost more than they save. SoA is a default, not a law.
- Floating-point geometry (correctness). Data layout is orthogonal to the hard part of geometric computation: degeneracies, robust predicates, exact-versus-interval arithmetic. A perfectly SoA Delaunay triangulation can still be wrong on collinear points. The book does not need to teach robust predicates; it needs to admit they exist for the readers building CAD, GIS, or path planning.
- The social layer (maintainability). Code review, ownership transfer, deprecation policy, runbooks. “Onboardable because the data is visible” is one bullet; the rest of the team-scale layer - the lone maintainer, the silent deprecation, the unwritten convention - is where every criterion above degrades fastest under turnover.
The first act is the harder problem, and the book finishes it. The second act - ship, evolve, observe, recover - begins now, in §45.
45 - Living with it
§44 closed the first act. The simulator runs: deterministic, scaled past the 1M wall, parallel on disjoint writes, persisted to disk and replayable from its log. On your machine, today, with you watching, it works.
That sentence has three load-bearing qualifiers. On your machine. Today. With you watching. The first act earns the verb “works” and stops exactly where those qualifiers bite. The second act is what it costs to remove them - to run the thing on a machine you have never seen, a year from now, while you are asleep.
That cost has a name: cost of ownership. It is the sum of every expense a system charges you after it first runs - the price of changing it, trusting it, observing it, recovering it, and handing it to someone else. The first act is a capital expense, paid once. The second act is the operating expense, paid for as long as the system lives. For anything that survives, most of the lifetime cost is in the second column.
And operating cost is margin you do not keep. Every byte stored forever, every managed service kept running, every layer someone has to watch and restart is a charge that recurs for the life of the system. This is where the not-free abstractions hide their price: a managed queue, a per-request database, an orchestration tier, a metrics vendor - each bought once for the convenience and billed ever after, in money, in latency, and in the people paid to keep it breathing. The single-node, in-memory discipline of the first act, read as an economic choice, is an operating-cost strategy: fewer parts to rent, fewer boundaries to watch, fewer ways to fail at 3 AM. Hold the moving parts down and the saving falls straight through to margin. That is the same dependency-pricing rule from §41, now read off the balance sheet instead of the source tree.
Software dies of cost, not bugs
Here is the fact the rest of the book is built around: programs rarely die of bugs. They die of cost. A program becomes too expensive to change, so it ossifies. Too opaque to debug, so every incident is an outage. Too fragile to restart, so nobody dares deploy it. Too entangled with one person’s memory, so it dies when they leave. None of those is a failed test. Each is a cost of ownership that grew without bound until the system was cheaper to abandon than to keep.
The first act produced something that works. Whether it survives is decided entirely in the second.
The leverage
This is not a chapter about hygiene, and it is not a chapter about virtue. Nobody here will tell you to write maintainable code because it is the responsible thing to do. The argument is leverage, the same argument as the rest of the book.
A system you can recover, observe, evolve, and hand off is worth far more than one that merely runs - not a little more, far more - because it lives longer and it changes cheaper. Lifespan and change-cost are the two numbers that decide what a piece of software is worth, and the second act is where you set both. For the solo builder or the small team this book is written for, the discipline ahead is the multiplier that turns a demo into an asset you keep. It is the difference between owning one system that lasts a decade and rewriting a worse one every year.
The good news is that the first act already did the hard part. Almost every move in the second act is a payoff of a decision you have already made. The log is the world (§37), so recovery and audit are reading, not rebuilding. Systems are functions over tables (§13), so a metrics collector is just another read-only system. The boundary is a queue (§35), so the storage system and the metrics sink hang off the same hook. Tables are columns (§7), so the hardware you have not reached for yet - SIMD, a GPU - is one transfer away. You are not learning a second architecture. You are collecting what the first one already earned.
What the second act asks
Five questions the first act never had to answer. The chapters ahead take them one at a time.
- Can you run it unattended? The human watching the console is gone. The log has to survive power loss, not just a clean shutdown. The system has to say what it is doing at 2 AM with nobody reading
print!. It has to give the same answer on a machine with a different core count, and - when a missed deadline is a fault and not just a dropped frame - it has to finish on time, every time. This is operations, and it is the spine of the second act. - Can you change it after it ships? The first save file you write into the world is a hostage to today’s column layout. Renaming a field, splitting one, changing a unit, back-filling a derived column - each is a migration, not an edit. This is extendibility, and the triple-store you already built is the start of the answer.
- Can you reach for more hardware when one core runs out? The book stops at one core’s bandwidth. The structure-of-arrays layout is the precondition for everything past it, and crossing the bus to a vector unit or an accelerator has its own cost model - transfer bandwidth and launch latency - that wants the same dollars-and-cents treatment §4 gave the cache. This is performance, past the wall the first act hit.
- Do you know where your own advice stops? Columns are a default, not a law. There are shapes - recursive, topology-heavy, very small, or bound for a non-ECS consumer - where they cost more than they save. And layout cannot rescue you from numerical fragility: a perfectly columnar geometry kernel is still wrong on a degenerate input. Honesty about the limits is part of maintainability; advice you cannot bound is advice you cannot trust.
- Can someone who is not you keep it alive? Code review, ownership transfer, deprecation, the runbook for the incident at 3 AM. “Onboardable because the data is visible” was one bullet in the closure; the rest of the team-scale layer is where every criterion above degrades fastest under turnover. This is the part of the cost no benchmark reaches, and the book says so plainly when it gets there.
A note on trust
The first act earned its claims by measuring them on four machines and printing the numbers. The second act keeps that bargain wherever it can. Recovery throughput, hash divergence as a function of core count, the GPU break-even size, the N where columns stop paying - all measured, all reproducible on your own hardware. Where a topic cannot be measured on four boxes - true worst-case timing needs a real-time OS, and the social layer needs a team, not a benchmark - the book says so and argues in the open instead of dressing an opinion as a result. The exclusions are named, not hidden.
The first act was the harder problem, and the book finished it. The second act is the longer one. It is where what you built stops being a thing that ran once and becomes a thing you own.
Orient yourself
These are not coding exercises; they are an audit. Run them against the simulator you finished in the first act, or against any system you currently maintain.
- Kill it. Stop the process with
kill -9(or pull the power) midway through a tick that writes the log. Restart. Does it come back to a consistent world, or a half-written one? Note what you would have to build to make the answer “yes”. You will build it in the crash-consistency chapter. - Go dark. Without adding a debugger or a
print!, answer: how many creatures are alive right now, and how fast is the population changing? If you cannot, you have no observability. Write down the three numbers you would most want on a dashboard. - Count the cost of one change. Pick a column. Rename it. Count every place that breaks: the struct, the systems, the serializer, every save file already on disk. That count is your cost of ownership for one trivial edit. The second act is about driving it down.
What’s next
The first chapter of the second act takes the unattended question head-on: §46. The console human is gone, and the first thing that breaks without them is recovery - “the log is the world” only while the log survives the stop.
46 - The log survives power loss
Concept node: see the DAG and glossary entry 46.
§37 made the load-bearing claim of the persistence story: the log is the world, and the world is the log replayed. §45 took away the human who used to be watching. Put those two together and a crack opens that the first act never had to look at. “The log is the world” carries an unstated precondition: the log is intact. On a clean shutdown it always is - the program flushes its buffers and exits in its own time. Unattended, the program does not get to choose how it stops. A power loss, an out-of-memory kill, a kill -9, a kernel panic: each halts the process between one instruction and the next, buffers half-flushed and the last write half-done. If the log is the world, a torn log is a torn world.
This chapter earns the precondition. The property it builds has a name once it is built: crash consistency - the guarantee that after any stop, at any instant, the system recovers to a world that actually existed, never to a corrupt halfway state.
Three facts about writing to disk. Each is a place the naive version breaks.
A write is not atomic. A single write() of N bytes is not one indivisible event. The bytes pass through a library buffer, the kernel page cache, the drive’s own cache, and finally the platters or flash. A crash can land anywhere in that pipeline. The record you appended can reach disk as its first k bytes and nothing more - a torn write. Replay a log whose last record is torn and you decode garbage into the world, or panic, or worse, succeed quietly with a corrupt value. The length of the record does not have to exceed a disk sector for this to happen; the cache layers tear at their own granularities.
fsync is a barrier, not a moment. Until you call fsync (or fdatasync), “written” means “sitting in a cache that a power loss empties.” fsync forces the file’s data through to durable media and does not return until it is there. It is the only thing that converts “wrote” into “will survive.” It is also expensive: it is the operation that binds you to IOPS, not bandwidth (§38). And it is a barrier, so ordering is part of the contract: the data record must be durable before the marker that says the record is complete, or a crash between the two leaves a marker pointing at bytes that never landed.
rename is atomic. POSIX rename() is the one filesystem operation that flips atomically: a reader sees either the old file or the new one, never a half-written blend. This is the lever for whole-file updates. To replace a snapshot, write the new one to a temporary file, fsync it, then rename it over the old name (and fsync the directory, so the rename itself survives a crash). At no instant does the snapshot on disk exist in a half-written form. The write-temp-then-rename pattern is how a whole file changes without a window of corruption.
From these three facts the design follows, and it is one you have already half-built.
Frame every batch as a transaction. The §22 cleanup pass already gathers a tick’s mutations into one batch and is the natural commit point (§37 logs there). Make each batch a unit that either fully happened or did not. Append its records, then a trailing commit marker - a length, a checksum over the batch, a sentinel. fsync the records, write the marker, fsync again. On replay, scan from the last snapshot; a batch whose marker is missing or whose checksum fails is a torn tail - discard it. The batch never happened. This is a write-ahead log built from the three facts, nothing more: the commit marker is the line between “durable” and “did not occur.”
Never acknowledge before the marker. The commit marker is not only an internal recovery device; it is the line you may make promises across. One instant before it is durable the write has not happened - a crash there erases it - so nothing downstream may be told it succeeded until the marker lands. This is the rule a payment processor lives by: an e-commerce site does not tell the customer “paid” until the bank confirms the charge settled, because a crash between “charged” and “confirmed” must resolve to not charged, never to a customer holding a receipt for money the system lost. A log obeys the same rule. Data arriving from a remote across the §35 boundary is not “received” when it lands in a buffer; it is received when it is durable and can be read back. Acknowledge one instant too early and a crash turns the acknowledgement into a lie: the sender believes you hold data you do not. “Logged” has one honest definition - I can read it back after a crash - and everything before the marker is hope.
Recover from a snapshot plus the surviving log. Snapshots are written temp-then-rename, so a crash mid-snapshot leaves the previous snapshot whole. Recovery loads the most recent intact snapshot and replays the committed log suffix after it (§37’s snapshot-plus-log, now crash-safe). The cost is bounded by the events since the last snapshot.
Make replay idempotent. A crash can stop you after a batch is durable but before its effect is folded into a snapshot, so recovery may replay a batch that a previous run had already applied. Replaying must converge: applying a committed batch twice must equal applying it once. The clean way is to always replay from a snapshot that predates the batch, so each committed event applies exactly once on the path from that snapshot forward. Determinism (§16) does the rest: the same snapshot plus the same committed log produces the same world, every recovery, on every machine.
Then price it. What you have built - a checksummed write-ahead log with a commit marker, batch fsync, atomic-rename snapshots, idempotent replay - is exactly what a real database’s durability layer gives you. SQLite’s WAL mode, Postgres’s WAL, any rusqlite or sqlx connection: under the surface they are doing these same three facts, hardened by years of edge cases you have not hit yet (group commit, partial-page tears, fsync lies on consumer drives). Build the from-scratch version once so you can read theirs and know what you are buying. For a save-game, the hand-rolled log is enough. For a system of record, buy the hardened one - and now you know precisely which guarantee you are paying for, and why the bare write() you started with did not have it.
The exclusion, named plainly: crash consistency is not backup, and it is not replication. It protects against the process stopping, not against the disk dying or the building burning. A single durable log on a single disk survives a kill -9; it does not survive the disk. That is a different cost - copies in other places - and the log’s shape (§37) is what makes those copies cheap, but the chapter does not buy them for you.
Measurements
The cost of crash consistency is the cost of fsync at the batch boundary, already measured in §38: batching the fsync across a tick’s records instead of paying it per record is the 14-256x batched-vs-unbatched span on the four reference machines, and a durable log widens it further because each unbatched record would pay a real fsync, not a buffered write. Crash correctness is not a throughput number; it is a pass/fail test, and the specimen (crash_consistency) runs it: write a hundred committed batches plus a torn one, recover, and the recovered world equals the last committed world with the torn batch discarded - never a halfway state. The same specimen demonstrates the acknowledgement rule - acknowledging before the marker over-acknowledges by exactly the torn batch (the sender holds an “ok” for a record the log lost), while acknowledging after the marker never does. The recovery-throughput number - how fast a real log replays - is a separate four-machine table, still pending, in the style of code/logger.
Exercises
- Tear a log on purpose. Write 1 000 length-prefixed records to a file with no commit marker and no
fsync. Truncate the file at a random byte past the last sector boundary to simulate a torn tail. Replay. Observe what decoding the torn record does to the world - a panic, a garbage value, or a silent corruption. - Add the commit marker. Append a per-batch trailing marker: the batch byte length plus a checksum (CRC32 or a simple Fletcher) over the batch. On replay, verify the checksum before applying; a batch that fails is discarded as a torn tail. Re-run exercise 1: the recovered world is now the last committed world, intact.
- Order the barrier. Make the writer
fsyncthe records before writing the marker, andfsyncagain after. Argue, from the three facts, why a crash at every point between those twofsyncs recovers to a consistent world. Identify the one ordering that does not. - Atomic snapshot. Write a snapshot with write-temp-then-
rename-then-fsync-the-directory. Run a loop that snapshots repeatedly while a second processkill -9s it at random. After every kill, confirm a complete snapshot is on disk - never a half-written one. - Idempotent replay. Take a snapshot at tick S, log committed batches to tick T, then replay the S..T suffix twice onto the snapshot. Hash the world after one pass and after two. They must match (§16). If they do not, find the event that is not idempotent.
- Recover to any tick. After a
kill -9mid-run, load the last intact snapshot and replay the committed suffix. Compare the recovered world hash against the live simulator’s hash at the same tick. Bit-identical, or trace the first divergent event. - The premature acknowledgement. Build a tiny ingest loop: receive a record, append it, and return “ok” to the sender before the commit marker is durable.
kill -9between the append and thefsync. On recovery, show the sender holds an “ok” for a record the log does not contain. Move the “ok” to after the marker and repeat: the sender now retries the un-acknowledged record, and the log and the sender agree. The payment-processor rule, measured. - Measure the barrier. Time the writer with
fsyncper record, thenfsyncper batch, then nofsync. Reproduce the §38 batching span on your hardware, and note where durability costs you against where it is free. - (stretch) Price the database. Replace the hand-rolled log with SQLite in WAL mode (
rusqlite). Re-run exercises 1 and 4 against it. Note which guarantees you no longer have to write, which edge cases it closes that yours did not, and what the dependency costs in build size and control.
Reference notes in 46_log_survives_power_loss_solutions.md.
What’s next
The log now survives the stop. The next unattended question is the next thing the missing human took with them: knowing what the system is doing. §47 turns observation into a read-only system - metrics, tracing, and structured logs that hang off the §35 boundary beside the storage system, so the answer to “what is it doing at 2 AM” is a table you can read, not a print! you wish you had added.
Solutions: 46 - The log survives power loss
Exercise 1 - Tear a log on purpose
Write [len: u32][bytes] records with no marker and no fsync, then truncate past the last sector:
#![allow(unused)]
fn main() {
let meta = std::fs::metadata("log.bin")?;
std::fs::OpenOptions::new().write(true).open("log.bin")?
.set_len(meta.len() - 7)?; // land mid-record
}A naive replay reads a len, then that many bytes. The torn tail does one of two bad things: len points past end of file (a decode error you at least notice), or len happens to be a small plausible value and you decode garbage as the final record and fold it into the world silently. The point is the second case: without a marker a replay cannot distinguish a complete log from a truncated one, so it cannot refuse the corruption.
Exercise 2 - Add the commit marker
Frame each batch and trail it with a checksummed marker:
#![allow(unused)]
fn main() {
// batch bytes, then: [MAGIC: u32][batch_len: u32][crc32(batch): u32]
fn append_batch(f: &mut File, batch: &[u8]) -> io::Result<()> {
f.write_all(batch)?;
f.write_all(&MAGIC.to_le_bytes())?;
f.write_all(&(batch.len() as u32).to_le_bytes())?;
f.write_all(&crc32(batch).to_le_bytes())?;
Ok(())
}
}On replay, walk batch by batch; a trailing region whose marker is absent, whose batch_len overruns the file, or whose crc32 does not match the preceding bytes is a torn tail. Stop there and discard it. Re-run exercise 1: recovery now yields the last committed batch, intact. The torn batch did not happen.
Exercise 3 - Order the barrier
fsync the records, write the marker, fsync again:
#![allow(unused)]
fn main() {
f.write_all(batch)?; f.sync_data()?; // records durable
f.write_all(&marker)?; f.sync_data()?; // marker durable
}Walk the crash points. Before the first sync_data: nothing is guaranteed durable, replay sees no complete batch, the batch did not happen - consistent. Between the two: records may be durable but the marker is not, so replay sees no marker and discards them - the batch did not happen - consistent. After the second: both durable, replay accepts - consistent. The one ordering that breaks is writing the marker before the records are durable: a crash there leaves a marker vouching for bytes that never landed, and replay accepts a batch built from garbage.
Exercise 4 - Atomic snapshot
#![allow(unused)]
fn main() {
let tmp = "world.snap.tmp";
{ let mut s = File::create(tmp)?; s.write_all(&serialize(world))?; s.sync_all()?; }
std::fs::rename(tmp, "world.snap")?; // atomic swap
File::open(dir)?.sync_all()?; // make the rename itself durable
}A kill -9 at any instant leaves either world.snap (the previous complete snapshot) or world.snap plus an orphan world.snap.tmp you ignore on load. There is no instant where world.snap is half-written, because rename flips atomically. The directory fsync is the step everyone forgets: without it the rename can be lost even though the temp file was durable.
Exercise 5 - Idempotent replay
Replay the committed S..T suffix onto the tick-S snapshot twice and hash:
#![allow(unused)]
fn main() {
let a = replay(load("S.snap")?, &log[s..t]);
let b = replay(load("S.snap")?, &log[s..t]);
assert_eq!(hash_world(&a), hash_world(&b));
}They match because replay is deterministic re-application from a fixed starting world (§16): each committed event applies exactly once on the path from the snapshot forward, so “twice” is two independent runs of the same pure function, not double-application. If a hash differs, an event is reading wall-clock time, a HashMap iteration order, or its own prior output - find it and make it a function of the snapshot plus the log only.
Exercise 6 - Recover to any tick
#![allow(unused)]
fn main() {
// after kill -9 mid-run:
let snap = load_latest_intact_snapshot()?; // ex 4 guarantees it is whole
let world = replay(snap, &committed_suffix(&log, snap.tick)?); // ex 2 bounds the suffix
assert_eq!(hash_world(&world), live_hash_at(world.tick));
}Recovery cost is bounded by the events since the last snapshot, which is why snapshot cadence is a tuning knob: frequent snapshots mean fast recovery and more write traffic. A divergent hash points at the first event that is not deterministic - the same hunt as exercise 5.
Exercise 7 - The premature acknowledgement
#![allow(unused)]
fn main() {
// WRONG: ack before durable
append(&record)?; reply_ok(&sender); // anti-pattern: bad!
f.sync_data()?; // crash before this loses the record
}kill -9 between reply_ok and sync_data: on recovery the record is gone, but the sender holds an “ok” for it and will never resend. The data the sender believes you accepted is lost. Move the acknowledgement after the marker is durable:
#![allow(unused)]
fn main() {
append(&record)?; write_marker()?; f.sync_data()?; reply_ok(&sender); // correct
}Now a crash before the ack leaves the record absent and unacknowledged, so the sender retries it. The log and the sender always agree. This is the payment-processor rule made mechanical: the marker is the only honest place to say “done”.
Exercise 8 - Measure the barrier
fsync per record, per batch, and never:
#![allow(unused)]
fn main() {
// per record: write+sync_data each record -> one fsync per record
// per batch: write all, then one sync_data -> one fsync per tick
// none: write all, no sync_data -> buffered, not durable
}The per-batch path reproduces the §38 batched-vs-unbatched span (14-256x across the reference machines), and the durable-per-record path is worse still, because each record now pays a real fsync rather than a buffered write. The “none” path is the fastest and is not crash-safe - it is the floor, useful only to show what durability costs.
Exercise 9 - Price the database
SQLite in WAL mode (rusqlite) gives you the checksummed write-ahead log, the atomic commit, and crash recovery for free, plus edge cases your version does not handle: group commit, partial-page tears, and the well-known fact that some consumer drives lie about fsync. What it costs you is a dependency (build size, a C library, less control over the on-disk format) and the loss of the column-direct layout you tuned in §36. For a save-game, keep the hand-rolled log. For a system of record, buy SQLite and spend your attention elsewhere - now knowing exactly which guarantee you are paying for.
47 - Observation is a read-only system
Concept node: see the DAG and glossary entry 47.
§46 made the log survive the stop: the system comes back from a crash to a world that existed. The next thing the missing human took with them is softer and just as fatal - knowing what the system is doing. §13 said the data is visible: print! any column and look. That is true and useful, and it is a debugger’s answer - you, at your desk, world paused, stepping through one moment. At 2 AM the world is not paused, you are not at your desk, and there is no print! you can add to a process that is already running and already wrong.
The reflex is to reach for a logging library and bolt strings onto the hot path. Resist it. Observability is not a thing you sprinkle on a system; it is a system, in the exact sense the book has used the word since §13. A function over tables. Its read-set is the world; its write-set is a small set of tables it owns and nothing else touches. Everything built for simulation systems applies to it unchanged, and that reuse is the whole trick.
Two properties fall out of “it is a read-only system,” and both are the line between observability that works and observability that lies.
It cannot perturb what it measures. A system whose write-set is disjoint from the world’s tables (§31) cannot change the world by reading it. A metrics system that only appends to its own table leaves the simulation bit-identical to a run with no metrics at all - provably, by the same write-set discipline that lets systems parallelise. This is the observer effect, designed out: contrast a debugger that mutates state to inspect it, or a profiler that rewrites the hot path. Read-only is not a courtesy here; it is what makes the measurement trustworthy.
It must be cheap, or the cost becomes the measurement. Reading columns is a sequential scan, the cheapest pass there is (§7, §27). A per-tick metrics sample is a handful of reductions over columns that are already hot. Keep it to a read, a reduce, and an append and it disappears against the tick budget (§4). Let it grow teeth - a sort to find a median, a full extra pass - and it starts heating the water it is trying to take the temperature of: the timing it reports is now the timing with the thermometer in it.
The three views are all that one read-only-system shape, pointed three ways.
Metrics - aggregate numbers over time. A system that each tick (or every N) reduces the world’s columns to a row of scalars - population, mean energy, tick duration, queue depths - and appends it to a metrics table. That table is a time series: the same SoA columns, indexed by tick. “How fast is the population changing” becomes a column you read, not a number you wish you had sampled.
Traces - one thing across many systems. The §37 log already records per-entity events; a trace is the log filtered to one rid across a tick, or one unit of work across the §35 boundary when a trace id rides along with it. Tracing is a query, not new machinery.
Structured logs - typed events you can ask questions of. Not print!("creature {id} died") but the event itself (the §37 record), queryable: every DIE for creature 17, every tick where population fell more than ten percent. A string is for a human reading one line; a structured event is for a system reading a million.
Alerting is the fourth view, and again just a system: read-set the metrics table, output a threshold crossing. “Population reached zero.” “Tick budget exceeded for a hundred ticks.” The thing that wakes you is a read-only system reading a table that another read-only system wrote.
One inversion of the §46 rule, stated so it is not missed. The log is lossless because the world depends on it: drop a record and the world is wrong, so you pay the fsync and you do not acknowledge until it is durable. Metrics are lossy by choice because the world does not depend on them. The pipeline that ships metrics across the boundary runs behind the queue (§35, the §37 revolver), and if the sink is slow or down you drop samples; you never stall a tick to emit one. Backpressure on observability degrades observability, not the system. The §46 acknowledgement rule still binds anything you claim delivered - a billing counter is not lossy - but the default for a metric is fire-and-forget: a missing sample is a gap in a chart, a stalled tick is an outage. Never trade the system’s progress for a measurement of it.
The leverage lands at 2 AM. You do not add observability during the incident; the read-only systems were already running, costing nothing, writing the history that answers the question before you knew to ask it. The difference between an outage and a glance is whether the three numbers you need are already a table you can read.
The exclusion, named: observability is not debugging. A debugger stops the world and inspects one instant at full fidelity; observability never stops the world and records its whole history at low fidelity. You reach for the debugger at your desk, for observability when you cannot. Neither replaces the other.
Measurements
The observer’s cost is a sequential read plus a reduction plus an append - the cheapest pass there is (§7, §27) - so the claim is that a per-tick metrics system is ~free against the tick budget, and the correctness claim is non-perturbation: the world is identical with metrics on and off, because the write-set is disjoint (§31). The specimen is the simulator’s own inspect - a read-only system that reads the subscriptions and writes only the population table - exercised by observe: the world recovers bit-identical live-id sets with inspect on and off (a pass/fail test, not a number), and at ~60k live the metrics pass is 0.025 ms against a 4.7 ms tick: 0.5% of the tick, 0.07% of the 33 ms budget. A four-machine overhead table follows in the style of code/logger; the shape - non-perturbing and ~free - is what the specimen already shows.
Exercises
- A metrics system. Add a system that every N ticks reduces the world’s columns to one row - population, mean energy, min/max energy, tick duration - and appends it to a
metricstable. The table is a time series with the same SoA shape as the world. - Prove it is read-only. Hash the world after 1 000 ticks with the metrics system running, and again with it removed. The hashes must match (§31): a disjoint write-set cannot perturb the world. If they differ, find the column the observer wrote that it should not have.
- Measure the thermometer. Time the tick with metrics on and off; show the cost is ~free. Then make the metrics system sort the energy column to report a median every tick, and watch the reported tick time climb - the measurement now changes the thing measured. Replace the sort with a streaming estimate and recover the budget.
- Trace one creature. Query the §37 log for a single
ridacross 100 ticks and reconstruct its life: born, ate, became hungry, died. Note that this needs no new storage - it is a filter over the log you already keep. - Ask a question logs cannot answer as strings. Find every tick where the population fell by more than ten percent. Do it over the structured event table; then argue why the same query over
print!text output is grep-and-pray, not a query. - An alert is a system. Add a system whose read-set is the
metricstable and whose output fires when population hits zero, or when tick duration exceeds the budget for T consecutive ticks. The pager is one more read-only system. - Behind the queue. Ship the metrics out to a file or socket through the §35 queue. Pause the sink mid-run. Show the tick rate is unaffected and samples are dropped, not stalled - observability degraded, system intact.
- (stretch) The guaranteed metric. For a counter you must not lose - a billing total, an audit count - apply the §46 rule: do not advance the “reported” watermark until the sink confirms the batch durable, and on restart resend from the watermark. Contrast its cost with the fire-and-forget default, and decide per metric which one it is.
Reference notes in 47_observation_is_a_system_solutions.md.
What’s next
The system now survives the stop and reports what it is doing. The next unattended failure is quieter than either: it gives a different answer on a different machine. §48 takes the determinism the first act earned (§16) into the place it most easily breaks - a parallel reduction whose result depends on the core count - so that “same seed, same world” survives the move from your laptop to the server you have never seen.
Solutions: 47 - Observation is a read-only system
Exercise 1 - A metrics system
A system whose read-set is the world and whose write-set is one metrics table:
#![allow(unused)]
fn main() {
fn metrics_system(w: &World, m: &mut Metrics) {
if w.tick % N != 0 { return; }
m.tick.push(w.tick);
m.population.push(w.energy.len() as u32);
m.mean_energy.push(w.energy.iter().sum::<f32>() / w.energy.len() as f32);
m.min_energy.push(w.energy.iter().copied().fold(f32::INFINITY, f32::min));
}
}Metrics is SoA like everything else - parallel columns indexed by sample. It is a time series you can plot, query, or serialise with the §36 machinery unchanged.
Exercise 2 - Prove it is read-only
#![allow(unused)]
fn main() {
let a = run(world.clone(), 1000, &[motion, hunger, cleanup, metrics_system]);
let b = run(world.clone(), 1000, &[motion, hunger, cleanup]); // no metrics
assert_eq!(hash_world(&a), hash_world(&b));
}The hashes match because metrics_system writes only Metrics, which is disjoint from the world’s tables (§31). A mismatch means the observer wrote a world column it should only have read - the most common slip is “normalising” or “clamping” a value while sampling it. Read, never write.
Exercise 3 - Measure the thermometer
Time the tick with and without metrics_system: a read-plus-reduce-plus-append over hot columns is lost in the noise of the tick. Now make it compute a true median:
#![allow(unused)]
fn main() {
let mut e = w.energy.clone(); e.sort_by(|a,b| a.partial_cmp(b).unwrap()); // anti-pattern: bad!
m.median_energy.push(e[e.len()/2]);
}The clone-and-sort is O(n log n) per tick and the reported tick time climbs visibly - the measurement is now changing what it measures. Replace it with a streaming estimate (a P-square quantile, or a coarse histogram updated in one pass) and the budget comes back. The lesson: an observer that is not cheap is not honest.
Exercise 4 - Trace one creature
#![allow(unused)]
fn main() {
let life: Vec<&Event> = log.iter().filter(|e| e.rid == 17).collect();
}No new storage: the trace is a filter over the §37 log you already keep. The result reads as a sentence - born at tick 4, ate at 9 and 14, became hungry at 20, died at 31. Tracing across the §35 boundary is the same filter once a trace id rides with the work unit.
Exercise 5 - Ask a question logs cannot answer as strings
#![allow(unused)]
fn main() {
for w in metrics.population.windows(2) {
if (w[0] - w[1]) as f32 / w[0] as f32 > 0.10 { report(/* tick */); }
}
}Over the structured metrics table this is a window scan. Over print! text it is grep plus a parser plus hope: the data is trapped in strings formatted for a human reading one line, not a program reading a million. A string is a dead end; a typed event is a column you can query.
Exercise 6 - An alert is a system
#![allow(unused)]
fn main() {
fn alert_system(m: &Metrics, a: &mut Alerts) {
if *m.population.last().unwrap() == 0 { a.fire("population extinct"); }
if m.tick_ms.iter().rev().take(T).all(|&ms| ms > BUDGET) { a.fire("over budget"); }
}
}Read-set the metrics table, write-set the alerts table. The pager is one more read-only system in the same DAG (§14); nothing about it is special.
Exercise 7 - Behind the queue
Hand metrics to a writer thread over a channel (§35, the §37 revolver):
#![allow(unused)]
fn main() {
match tx.try_send(sample) { // never blocks the tick
Ok(()) => {}
Err(TrySendError::Full(_)) => { dropped += 1; } // degrade observability, not the sim
}
}Pause the sink and the tick rate is unchanged; the bounded channel fills and try_send drops samples. The chart gets gaps; the simulation does not stall. Contrast with a blocking send, which would stall the tick the moment the sink falls behind - trading the system’s progress for a measurement of it.
Exercise 8 - The guaranteed metric
For a counter you must not lose (a billing total, an audit count), apply the §46 rule:
#![allow(unused)]
fn main() {
// advance the durable watermark only after the sink confirms the batch durable
let acked = sink.send_durable(&batch)?; // returns once the far side fsync'd
watermark = acked.last_offset; // persist watermark with the world
// on restart: resend everything after `watermark`
}This is observability that has crossed from lossy to lossless, and it costs what durability always costs: a round-trip and a watermark to persist. Decide it per metric - fire-and-forget for a dashboard gauge, watermarked-and-resent for money. Most metrics are the former; the few that are the latter are not really metrics, they are log records wearing a metric’s clothes.
48 - Reductions don’t parallelize freely
Concept node: see the DAG and glossary entry 48.
§31 earned a strong claim: systems with disjoint write-sets parallelise freely, with no locks and no coordination. §16 earned another: same seed, same system order, same world, every run. Both are true. Put them under one stress the first act never applied - a different number of cores - and a seam opens between them. The world that hashed identically on your four-core laptop hashes differently on the thirty-two-core server. Same code, same seed, same log. Different machine, different world.
This is the worst class of bug, because it passes. It passes every test you ran, because you ran them on one machine with one core count. It surfaces only after the move to the hardware you have never seen - the unattended server of §46 and §47, where you cannot attach a debugger and the only symptom is that two nodes that should agree do not. The determinism survived everything except the deployment.
The cause is one fact and one consequence.
Floating-point addition is not associative. (a + b) + c is not always a + (b + c) in the last bits. This is not a bug in your code or your hardware; it is IEEE-754 working as specified. Each addition rounds its result to fit the mantissa, and rounding depends on the magnitudes being added. Change the grouping and you change which intermediate values get rounded, and the final bits move.
A parallel reduction groups by core count. Split a sum of a million values across four threads and you add four partials, each a sum of 250 000 in some order, then combine the four. Across eight threads you add eight partials of 125 000. Serially you add all million in index order. Three different groupings, three different roundings, three different results in the low bits. The reduction’s output is a function of how many threads computed it. Same data, same seed, more cores, different number.
And it does not stay in the low bits. That last-bit difference is an input to the next tick. A simulation is a feedback loop; small differences amplify. Over enough ticks two worlds that started one ULP apart are visibly, structurally different - different creatures alive, different population. The §16 world-hash that was the bedrock of replay, distribution, and testing now depends on nproc. “The log is the world” (§37) quietly acquired an asterisk: on the same core count. Distribution - two nodes converging from one log - breaks outright.
The canary is precise: hashes stable when you fix the core count, unstable when you change it. If your world hashes match locally and diverge in CI, and the CI box has a different nproc, suspect a parallel floating-point reduction before anything else.
The fix is not “stop parallelising.” §31 still holds: the per-element work parallelises freely. The reduction is the one place where parallel work meets a single shared result, and that is the only place order leaks back in. So you isolate the non-determinism to the combine step and make that deterministic. Determinism is a property of the combine, not the compute. Two ways to buy it.
Fix the reduction order. Choose a fixed number of partitions, independent of the thread count - say sixty-four - and reduce each into a slot indexed by its partition id. The threads share those fixed partitions however the scheduler likes; the partials land in id order regardless of which thread computed which, and a single serial fold walks the slots in id order. The grouping is now defined by the fixed partition count, not by how many threads ran. The easy mistake - and it is the obvious one - is to make the partition count equal the thread count, giving each thread its own partition: that changes the grouping right back, and the result still moves with nproc. The number of partials must be fixed, not the number of threads. The expensive per-element work still runs on all cores; only the fold over a handful of partials is serial, and a handful is cheap. You keep the §31 speedup and recover the §16 guarantee - the result still rounds per addition, but it rounds the same way every time, on every machine.
Accumulate in integers. Integer addition is associative: exact, order-independent, identical on one core or sixty-four. Scale each value to a fixed-point integer, sum exactly in any order, scale back at the end. There is no rounding to reorder because there is no rounding until the final scale-back. The price is range management - you choose the fixed-point scale, and you must not overflow the integer - so it fits best where the quantity is bounded and its precision is known, like a sum of energies. Integer accumulation is deterministic by construction; fixed-order floating-point is deterministic by discipline. Where you can bound the range, integers are the stronger guarantee.
Neither is exotic, and the choice is usually easy: retrofit fixed-order onto an existing float pipeline; reach for fixed-point when the reduction is core to correctness and the range is known.
One forward note. Threads are not the only reducer that reorders. A SIMD sum adds in lanes; a GPU reduction adds in a tree across thousands of lanes. Both reorder, both diverge, and both take the same two fixes. The discipline you build here is the precondition for crossing to a vector unit or an accelerator at all - the heterogeneous-compute chapter inherits it directly.
The exclusion, named: this is about reproducibility, not accuracy. A fixed-order or integer reduction is not more correct in the numerical-analysis sense - it does not get you closer to the true sum - it gets you the same answer every time, which is what replay, distribution, and a passing test across machines require. If you need accuracy too, that is compensated summation, a separate technique layered on top.
Measurements
The divergence is a demonstration, not a benchmark. Measured (reduction_divergence, one million harmonic values), the low bits of the parallel float sum change with the thread count:
| threads | racy (partition = threads) | fixed-order (64 partitions) | integer (i128) |
|---|---|---|---|
| 1 | ...1df0d6 | ...1df271 | ...025a920c |
| 2 | ...1df2a6 | ...1df271 | ...025a920c |
| 4 | ...1df2c6 | ...1df271 | ...025a920c |
| 8 | ...1df234 | ...1df271 | ...025a920c |
The racy column is a different result at every thread count; the fixed-order and integer columns are bit-identical across all four. (The fixed-order value differs from the racy one-thread value in the low bits, because a 64-partition grouping rounds differently from index order - it is reproducible, not more accurate, exactly the exclusion named below.) The cost of the fix is the serial fold over the partition count - a few dozen values against the parallel work it guards, a rounding error on the §31 speedup. This is a single-machine reproduction; cross-machine numbers are pending, but the divergence and the two fixes are machine-independent facts (IEEE-754 non-associativity and integer associativity), not measurements that vary by box.
The simulator gives the complementary evidence: forage parallelised across one to eight threads is bit-identical to serial (measured, forage_scaling), precisely because it is a per-element map with no reduction across targets - the safe case. Add a global energy sum each tick (exercise 2) and you are in the trap.
Exercises
- Make it diverge. Sum a float column of one million values in parallel at 1, 2, 4, and 8 threads. Hash each result. Show the hashes differ, and that they are each stable on repeated runs at a fixed thread count. The bug is real and it is reproducible per core count.
- Compound it. Feed that reduction into the simulator (say, a global energy normalisation each tick). Run 1 000 ticks at two different thread counts from the same seed. Hash the worlds. Watch a last-bit difference become a different population.
- Fix the order. Reduce per partition into a fixed-id slot, then fold the slots serially in id order. Re-run exercise 1: the hashes are now identical across all thread counts. Time the serial fold and show it is negligible against the parallel work.
- Accumulate in integers. Scale the energies to fixed-point
i64, sum exactly, scale back. Show the result is identical across thread counts and across summation orders. Find the scale where overflow begins, and the scale where precision loss begins. - Replay across core counts. Replay one committed log (§46) at two thread counts. Bit-identical world only with a fixed-order or integer reduction. This is the §37 distribution claim, made true on heterogeneous hardware.
- The canary test. Write a CI check that runs the simulator at two core counts and asserts equal world hashes. It fails today; make it pass; keep it - it is the regression guard that catches the next racy reduction before a server does.
- (stretch) The same bug on a vector unit. Replace the threaded reduction with a SIMD horizontal sum. Show it reorders and diverges just as a thread pool does, and that the fixed-order and integer fixes both still apply. Note what this implies for the GPU chapter ahead.
Reference notes in 48_reductions_dont_parallelize_freely_solutions.md.
What’s next
Three of the four unattended questions are answered: the system survives the stop (§46), reports what it is doing (§47), and gives the same answer on every machine. The last one is the hardest deadline of all. §49 takes on hard real-time - where a missed deadline is not a dropped frame but a fault - and marks the line between the soft budgets the trunk taught (§4, §39) and the worst-case-execution-time discipline a control loop demands.
Solutions: 48 - Reductions don’t parallelize freely
Exercise 1 - Make it diverge
#![allow(unused)]
fn main() {
fn parallel_sum(xs: &[f32], threads: usize) -> f32 {
let chunk = xs.len().div_ceil(threads);
std::thread::scope(|s| {
let hs: Vec<_> = xs.chunks(chunk)
.map(|c| s.spawn(move || c.iter().sum::<f32>()))
.collect();
hs.into_iter().map(|h| h.join().unwrap()).sum()
})
}
}Sum a million f32s at 1, 2, 4, 8 threads and the bit patterns of the results differ, because each thread count groups the additions differently and floating-point rounds at each step. Each result is stable on repeated runs at a fixed thread count - the non-determinism is across core counts, not across runs. The bug is real and reproducible, which is exactly why it slips through a test suite run on one machine.
Exercise 2 - Compound it
Use that sum for a per-tick energy normalisation and run 1000 ticks from one seed at two thread counts:
#![allow(unused)]
fn main() {
let total = parallel_sum(&w.energy, threads);
for e in &mut w.energy { *e /= total; } // the divergent total feeds every creature
}Hash the worlds. They differ, and the difference is no longer in the last bit - the feedback loop has amplified one ULP into a different population. This is the §16 contract broken by a single reduction.
Exercise 3 - Fix the order
Reduce each partition into a fixed slot, then fold serially in slot order:
#![allow(unused)]
fn main() {
let partials: Vec<f32> = /* one per partition, computed in parallel */;
let total: f32 = partials.iter().sum(); // serial fold, fixed order, every machine
}Re-run exercise 1: the hashes are now identical across all thread counts, because the grouping is defined by partition id, not by thread count. Time the serial fold - it is a sum over the partition count (a few to a few dozen values), negligible against the parallel per-element work it guards. You keep the §31 speedup and recover determinism.
Exercise 4 - Accumulate in integers
#![allow(unused)]
fn main() {
const SCALE: i64 = 1 << 20; // fixed-point: ~6 decimal digits
let total_fixed: i64 = xs.iter() // any order, any thread count, identical
.map(|&x| (x as f64 * SCALE as f64) as i64)
.sum();
let total = total_fixed as f64 / SCALE as f64;
}Integer addition is associative, so the result is identical across thread counts and across summation orders - no fixed-order discipline required. Find the boundaries: overflow begins when count * max_value * SCALE exceeds i64::MAX (lower the scale or widen to i128); precision loss begins when SCALE is too small to represent the smallest meaningful difference. Bounded quantities like energy fit comfortably between the two.
Exercise 5 - Replay across core counts
#![allow(unused)]
fn main() {
let a = replay(snapshot.clone(), &committed_log, /*threads=*/ 4);
let b = replay(snapshot.clone(), &committed_log, /*threads=*/ 64);
assert_eq!(hash_world(&a), hash_world(&b)); // passes only with a deterministic reduction
}With a racy reduction this fails and the §37 “distribution is structural” claim is false on heterogeneous hardware - two nodes from the same log diverge. With the fixed-order or integer reduction it passes, and replay across machines with different core counts is bit-identical, as §16 promised.
Exercise 6 - The canary test
#![allow(unused)]
fn main() {
#[test]
fn deterministic_across_core_counts() {
let seed = 42;
let a = run_sim(seed, /*threads=*/ 1);
let b = run_sim(seed, /*threads=*/ std::thread::available_parallelism().map(|n| n.get()).unwrap_or(1));
assert_eq!(hash_world(&a), hash_world(&b));
}
}It fails today (a racy reduction is somewhere in the tick), passes once the reductions are fixed, and stays in CI as the guard that catches the next one. It is cheap, it is deterministic, and it fails on the developer’s machine instead of in production on a box with a different nproc.
Exercise 7 - The same bug on a vector unit
A SIMD horizontal sum accumulates into lanes and folds the lanes at the end - a different grouping again, so the result differs from a scalar sum and from a sum with a different lane count. The fix is the same: reduce into a fixed number of lane-accumulators and fold them in a defined order, or accumulate in integer lanes. The implication for the heterogeneous-compute chapter is direct - a GPU reduction is a tree across thousands of lanes, the most reordered reduction of all, and it takes the same two fixes. Determinism is a property of the combine wherever the combine runs.
49 - The worst case is the only case
Concept node: see the DAG and glossary entry 49.
§4 gave the tick a budget: 33 ms at 30 Hz, and you spend it wisely. §39 gave the long computation an anytime contract: return the best answer you have when the deadline arrives. Both are soft real-time. A missed deadline costs quality - a dropped frame, a coarser answer - and the system keeps running. You have been doing soft real-time for the whole book, and for almost everything you will build, soft is the right and sufficient discipline.
Soft does not mean unmanaged. When the work outgrows the budget - more entities than you planned, a load spike, a heavier tick - you choose, in advance, how to miss. The rule is to shed fidelity, never integrity: the systems that keep the world valid run every tick, exact; the systems that keep it fresh and fine are the ones you cut. The buffered commit (§22) is what makes that safe - a tick that runs long still applies a whole world at the boundary, never a half-updated one, so the cost of an overrun is latency, not corruption. Within that, you degrade in a fixed priority order: drop the pure observers first, stretch the GC’s cadence, defer the slow-moving systems, and - the best lever - apply back-pressure to whatever creates the load, because deferring growth attacks the cause, not the symptom. Two disciplines keep it honest. The degradation is a logged decision, not a wall-clock branch, so a degraded run still replays (§37, §48); a shed that depends on how fast the machine happened to be running stops being a function of its inputs. And the staleness is bounded and self-healing: each shed defers work by a known number of ticks and catches up when the load drops. This is the budget read as a curve (§4): past the comfortable scale the rate slides, and graceful degradation is how you choose what slides.
This chapter marks the line where that stops. In hard real-time a missed deadline is not a dropped frame; it is a fault. The motor controller that computes the next current 200 microseconds late has already let the motor run away. The flight-control loop that skips a cycle has lost the aircraft for that cycle. The emergency stop that fires 10 ms late did not fire. When the deadline is a fault, the average case is irrelevant. A loop that meets its deadline 99.999 percent of the time has failed if the missing 0.001 percent is the brake.
That single sentence inverts the book. Every technique so far chased the mean: cache-friendly layout, SoA, parallelism, branch-predictable code - all of them make the common case fast and let the rare case be slow. Hard real-time chases the tail. It does not care that the average tick is 2 ms if one tick in a million is 40 ms, because the one is the only one that matters. The worst case is the only case.
What hard real-time demands is a different ledger.
Worst-case execution time (WCET), not average. You must know the longest the code can ever take, and prove it. That means every loop has a statically known maximum iteration count, every branch’s slower side is the one you count, there is no unbounded recursion, and there is no data-dependent loop without a bound. The §4 budget stops being an average you usually hit and becomes a ceiling you prove you never cross.
No allocation in the inner loop. malloc and free have unbounded worst-case time: the allocator may walk free lists, coalesce, or fall through to the OS for more pages. One hot-path allocation puts an unknowable spike in your WCET. Pre-allocate everything; the loop allocates nothing.
No blocking call in the inner loop. A syscall, a lock, an fsync, a page fault - each can stall for an unbounded time while the kernel does something else. The hot loop touches only memory that is already resident and locks that are already held or never contended.
Bounded jitter. Soft real-time asks “fast enough on average”. Hard real-time asks “does the tick fire every period, on time, with bounded variance”. The enemies of jitter are the very machinery that makes the average fast: the OS scheduler preempting you, interrupts, CPU frequency scaling, and the cache itself. You fight them with a real-time scheduler (SCHED_FIFO, SCHED_DEADLINE), CPU isolation and pinning (isolcpus), locking your pages in RAM so they never fault (mlockall), and pinning the clock so it does not slew.
Priority inheritance. A high-priority task waits on a lock held by a low-priority task that has been preempted by a medium-priority one. The high-priority task now misses its deadline because of a task it outranks - priority inversion, and it has crashed real spacecraft. The fix is a mechanism: a task holding a lock temporarily inherits the priority of the highest task waiting for it.
Here is the part that should reassure you: most of this discipline you already have. The book has avoided per-tick allocation since §7 - SoA columns are pre-sized, the §22 buffer is reused, §24 recycles slots instead of freeing. I/O lives off the hot path behind the §35 queue and the §37 revolver, exactly where a syscall must not be. A system is a bounded pass over a known-size table (§13); the order is fixed and deterministic (§16). You built these for performance, and they are hard-real-time preconditions for free. The data-oriented core is already most of the way to predictable.
And here is the part that should sober you: the rest is a genuine inversion, not just more of the same. The book measured averages; hard real-time needs proven worst cases, and the measured ns/element ladder of §27 is an average over a warm cache. The §1 cache staircase the book celebrates as a performance story is, here, a source of WCET uncertainty: a cache miss is the worst case, and code whose timing depends on cache state has a worst case far above its mean. The same is true of branch prediction, speculation, and frequency scaling - each speeds the common path and widens the gap between common and worst. Hard real-time often disables them, or budgets for their worst case, and runs slower on average to be predictable. That is the opposite of every instinct the book has trained. Hard real-time is not the book’s techniques turned up; it is a different objective function that sometimes overrules them.
The exclusion, stated as plainly as it can be, because here it is a safety matter: this book does not build hard-real-time systems, and a soft-real-time system must never be deployed where a hard one is required. A certified controller is a different craft - a real-time operating system, WCET analysis tools, and certification regimes (DO-178C for avionics, IEC 61508 for industrial safety) that this book does not touch. The simulator you built is a wonderful thing and it is not a brake. The value of this chapter is the line itself: knowing which side of it you are on, so you neither over-build a game loop into a control system nor, far worse, mistake your fast average for a guarantee you never made.
Measurements
This is the one chapter where the book’s measure-it-on-four-machines moat partly cannot reach: true WCET needs a real-time OS and formal timing analysis, not four Linux boxes, and the chapter says so rather than faking a number. Jitter, though, measures cleanly and is the right demonstration - record the actual period of every tick over a few million ticks on a stock scheduler and the histogram has a long, ugly tail driven by the OS, not your code. Pinning the core, raising the scheduling class, and locking pages tighten that tail visibly. The exercises build the histogram; the lesson is in the shape of the tail, and in which knobs flatten it.
Exercises
- Measure your jitter. Run an empty tick loop at a fixed period for a few million iterations and record the actual period each time (a monotonic clock). Plot the distribution. The mean is tight; find the tail - the p99.9 and the max - and note it is tens to hundreds of times the mean on a stock desktop.
- Find the scheduler. Re-run pinned to an isolated core (
taskset/isolcpus) underSCHED_FIFO, withmlockall. Show the tail shrink. You did not make the code faster; you made the worst case smaller, which is the only thing hard real-time counts. - Hunt an unbounded operation. Audit one system for anything without a static bound: a
HashMapthat can rehash, aVecthat can reallocate, a data-dependent loop, aformat!. Each is a spike in your WCET. Replace one with a pre-sized, bounded equivalent and re-measure the tail. - Allocation is a spike. Add one
Box::newper tick to the hot loop and watch the tail grow; remove it and watch it shrink. Confirm the book’s no-per-tick-allocation discipline (§7, §24) was buying you tail latency all along. - The cache is a worst case. Run a system over data small enough to stay in L1, then over data large enough to miss to RAM (§27). Compare not the means but the maxima. Argue why average-case layout tuning does not give a WCET, and what would.
- Soft, not hard - on purpose. Take your anytime system (§39) and write down, honestly, its worst-case time. Show it has none you can prove. Conclude what kind of deadline it may and may not be trusted with.
- (stretch) Priority inversion. Build three tasks - high, medium, low - sharing one lock, and reproduce the high task missing its deadline because the low task holds the lock while the medium task runs. Then enable priority inheritance and show the deadline met. Name the mechanism that fixed it.
- Degrade gracefully (the soft side). Overload the tick - more entities than the budget allows. Implement a priority-ordered shed: drop the inspection system first, stretch the GC cadence, then defer reproduction (back-pressure on the thing creating the load). Show two things hold: the world stays consistent every tick (the §22 buffered commit), and a degraded run still replays bit-for-bit because each shed was logged, not branched on the wall clock. Confirm the staleness is bounded - nothing is deferred more than a fixed number of ticks.
Reference notes in 49_worst_case_is_the_only_case_solutions.md.
What’s next
That answers the last of the four unattended questions: the system survives the stop (§46), reports what it is doing (§47), gives the same answer on every machine (§48), and you now know the line past which its soft deadlines cannot be trusted. §50 draws the operations group together - four chapters that were one move - and marks the turn from running the system to changing it, where the rest of the second act goes.
Solutions: 49 - The worst case is the only case
Exercise 1 - Measure your jitter
#![allow(unused)]
fn main() {
let period = Duration::from_micros(1000);
let mut next = Instant::now();
let mut samples = Vec::with_capacity(2_000_000);
for _ in 0..2_000_000 {
next += period;
while Instant::now() < next {} // busy-wait to the deadline
samples.push(Instant::now().duration_since(next)); // lateness
}
}Plot the distribution of lateness. The mean is tight - a microsecond or two - but the tail is not: the p99.9 and the max are tens to hundreds of times the mean on a stock desktop, driven by the OS scheduler, interrupts, and frequency changes, not by your code. The mean is a lie about a hard deadline; only the max tells the truth.
Exercise 2 - Find the scheduler
Pin to an isolated core and raise the scheduling class:
# boot with isolcpus=3, then:
taskset -c 3 chrt -f 80 ./sim # SCHED_FIFO priority 80 on core 3
#![allow(unused)]
fn main() {
// and lock pages so a fault never stalls the loop:
unsafe { libc::mlockall(libc::MCL_CURRENT | libc::MCL_FUTURE); }
}Re-measure: the tail shrinks markedly. You did not make the average tick faster - you made the worst tick smaller by removing the scheduler, the page fault, and the frequency change from the loop’s path. That is the only quantity hard real-time scores.
Exercise 3 - Hunt an unbounded operation
Audit one system for anything without a static bound: a HashMap insert that can trigger a rehash, a Vec::push that can reallocate, a format! that allocates, a while whose count depends on data. Each is a spike in the WCET even though it is invisible in the average.
#![allow(unused)]
fn main() {
let mut seen = HashMap::new(); // anti-pattern: bad! rehash is an unbounded spike
// bounded replacement: a pre-sized slot array indexed by entity id
let mut seen = vec![false; capacity];
}Replace one and re-measure the tail: the spike at the rehash boundary disappears. Bounding the worst case, not speeding the average, is the work.
Exercise 4 - Allocation is a spike
#![allow(unused)]
fn main() {
let _b = Box::new([0u8; 256]); // anti-pattern: bad! one heap alloc per tick
}Add this to the hot loop and the jitter tail grows - the allocator occasionally walks a free list or calls into the OS, and that occasionally lands in your worst-case tick. Remove it and the tail drops back. This confirms the book’s no-per-tick-allocation discipline (§7 pre-sized columns, §24 recycling) was buying tail latency all along, for free, while you thought you were only buying throughput.
Exercise 5 - The cache is a worst case
Run one system over data that fits in L1, then over data that misses to RAM (§27). Do not compare the means - compare the maxima. The large working set’s worst tick is far above its mean, because a cold miss is the worst case and the cache state is not under your control. A WCET cannot be read off an average-case benchmark; it needs either a measured-and-bounded worst case (with the cache cold, deliberately) or a static analysis that assumes every access misses. Average-case layout tuning makes the mean fast and tells you nothing about the ceiling.
Exercise 6 - Soft, not hard - on purpose
Take the anytime system from §39 and try to write down its worst-case time. You cannot prove one: its runtime depends on how much work the deadline allowed, which depends on the rest of the tick, which depends on the data. It is soft real-time by construction - it degrades quality gracefully and that is its whole virtue - and it must therefore never sit in a control loop where a missed deadline is a fault. Knowing which deadlines a component may be trusted with is the deliverable; the honest answer here is “soft ones only.”
Exercise 7 - Priority inversion
Three threads sharing one lock - high, medium, low priority:
low takes the lock, then is preempted by medium (which never touches the lock)
high wakes, wants the lock, blocks behind low
medium runs freely, starving low, so low never releases, so high misses its deadline
Reproduce it with SCHED_FIFO priorities and a Mutex held briefly by low while medium spins. high misses. Then enable priority inheritance (a PTHREAD_PRIO_INHERIT mutex): low temporarily inherits high’s priority while holding the lock, runs ahead of medium, releases, and high makes its deadline. The mechanism that fixed it is priority inheritance - the lock lends its waiter’s priority to whoever holds it.
Exercise 8 - Degrade gracefully (the soft side)
The priority order is not arbitrary: shed in increasing order of how much the world depends on the work. The inspection system writes nothing the simulation reads, so it goes first and costs nothing but a stale dashboard. The GC’s cadence can stretch because dead slots linger harmlessly for a few more ticks. Deferring reproduction is the strongest lever because it is back-pressure: the births are what grow the population that overran the budget, so deferring them reduces the next tick’s load - the shed attacks the cause, and the system walks itself back under budget instead of fighting the symptom forever.
Two properties have to hold or the degradation is worse than the overrun. First, integrity survives: because mutation is buffered (§22) and committed at the tick boundary, a long or shed tick still applies a whole, consistent world - you observe a late world, never a torn one. Second, the run still replays: the shed must be a logged decision, not a branch on if over_budget, or the run stops being a function of its inputs and the §37/§48 replay guarantee evaporates - and that bug is invisible until the multi-hour run on the slower machine sheds differently and diverges. Log the decision; replay applies the identical shed.
Bounded staleness is the last check: each deferral has a fixed horizon (a system skipped this tick runs next tick; a region foraged every other tick is at most one tick stale), so the degraded world is never more than a known distance from the budget-met world, and it heals when the load drops. Soft real-time managed this way is not “it got slow”; it is “it chose, predictably and reversibly, what to slow.”
50 - It runs without you
§45 opened the second act with five questions. The four chapters since answered the first one - can you run it unattended - and it is worth stopping to see that they were not four tricks. They were one move, made four times.
§46: the system survives the stop. §47: it says what it is doing. §48: it gives the same answer on every machine. §49: you know the deadline it can and cannot promise. Listed flat they look unrelated. They are not. Each one removed a dependency on the human who used to stand next to the machine.
The human who restarted it after a crash became the commit marker and the replay (§46). The human who watched the console became a read-only metrics system (§47). The human who only ever ran it on the one laptop became a deterministic reduction (§48). The human who hit stop in time became a bounded worst case (§49). Act one made the system work. These four made it work without you in the room.
And the move was the same shape every time: take a failure that used to be a person’s vigilance to catch, and turn it into a property the system holds and a test you can run. A torn write stopped being “hope the power doesn’t go out” and became a commit marker you assert on. “Is it healthy” stopped being a feeling and became a metrics table you query. “Same seed, same world” stopped being true-on-my-machine and became a CI check across core counts. A missed deadline stopped being “it felt sluggish” and became a jitter histogram with a bound. Operations is not a toolbox. It is the systematic conversion of someone is watching into something is asserted.
The same move answers a question the four chapters circled without naming: will it survive its own success? A system that holds at today’s load meets a different wall at ten times the load, and another at a hundred - the tick that crossed the budget, the cores that stopped helping, the memory that ran out. Left to a human, each is a 3 AM discovery. Converted, it is a scale sweep: run every system across the decades of scale you might see, in development, and read where each curve crosses the budget. The walls stop being surprises and become a map - this system binds first, at this size, and here is the lever. Measured on the simulator, the tick holds comfortably above 30 Hz out to a few hundred thousand entities and slides toward a single hertz by a few million - the one-over-N curve §4 named, now with numbers behind it (a modern desktop; the slope is machine-independent, the absolute scale is not). “Will it scale” stops being a flinch in a meeting and becomes a curve you read off a chart, which is the vigilance-into-assertion move once more, spent on scale.
The walls are not all the same kind of failure, and that is what makes the map worth drawing. Most degrade softly - slower, coarser, fewer entities, but still running and still consistent, the graceful degradation of §49. One does not: run out of memory and the process is killed and the world is gone. So the discipline reduces to a single rule, never meet the hard wall by surprise. Map the staircase once, in development, so every step down in production is one you chose with a known margin, not a wall you discovered with nobody in the room. The cheap capital expense of the sweep buys the expensive operating expense of the calm descent - the §45 bargain, paid down one more time.
That conversion is the whole economic point from §45, paid down. A system that needs a human in the loop costs a salary for as long as it runs; a system that runs without one costs almost nothing to operate. Each chapter in this group retired a recurring cost - not a feature added, a person’s standing attention no longer required. That is operating cost falling straight through to margin, exactly as promised, and it is why the unattended question was worth four chapters.
It is also the hardest of the second act’s five promises to keep, which is why it came first. The system now survives, reports, agrees, and respects its deadlines. It is still, though, frozen in the shape you shipped it in, and it has been handed one rule hard: lay the data out flat and stream it. Two of the remaining questions press on exactly that, and this book still walks them: where the flat-and-stream default stops paying (§51 opens the limits arc), and what to actually reach for when one core is not enough (§56). Two are for a later volume: the schema drifts the moment the world does, and one day someone who is not you will own it. That is the horizon this book charted, now partly walked.
The operations leg is done. The machine in the next room is running, nobody is watching it, and that is precisely the point. §51 picks up the last leg: the honest limits of the discipline that got you this far.
51 - Knowing the limits
§45 put five questions to a system that has to survive, and the fourth was the one that turns the book on itself: do you know where your own advice stops? For forty chapters the advice was to lay the data out flat and stream it, and on the simulator it has been right every time. This part is where you find the edge of it, and finding that edge is the whole job.
The simulator itself cannot show you the edge, because its world is the one structure-of-arrays was built for: rows of positions and a few scalars, read in bulk. Put the question to it and it answers, honestly, that flat-and-stream never breaks down, because for that shape it does not. The limits live on shapes the simulator never has, so the only way to reach them is to go and build those shapes on purpose.
That is what the five chapters here do. Each one leaves the simulator for a small, self-contained project in a domain the trunk never visited - a weekend’s work, with its own reference crate - and each was chosen because it is a place the flat-and-stream default meets a genuine limitation.
| The project | Where the default meets a limit |
|---|---|
| An expression evaluator | A recursive structure is all shape and no rows. Flat storage on its own buys nothing; the win is the order you walk the data, not the array it sits in. |
| A scenegraph | A hierarchy whose shape changes every frame. Recomputing only the part that moved beats recomputing all of it, but only up to a point, and only when the moved part is packed together. |
| A spreadsheet | Dependencies that form a graph rather than a tree. The stale set becomes a cone you have to compute, and an aggregate stays expensive even when a single cell changed. |
| A floating-point ledger | A column ill-conditioned enough that the total comes out wrong. The order of the additions decides the answer, and no layout corrects it. |
| A bandwidth wall | Work that outgrows one core. The ceiling is the memory channel, not the core count, and reaching for more hardware is rarely what helps. |
Every chapter has the same shape. You take something small enough to hold in your head - an expression, a jointed arm, a five-cell sheet, three numbers, one pass over memory - work it through by hand, and then measure where it bends. The project is the experiment and the measurement is the verdict, so you end up watching the limit happen rather than taking it on trust.
What the measurement gives back is a crossover. The columnar layout wins up to some size, or some rate of change, and past that point it stops winning; each chapter finds where, and prints the number. A default you can bound that way is one you can keep trusting. Knowing where “lay it out flat and stream it” stops paying is the rest of what it means to own the advice instead of merely repeating it.
The five build on one another. The expression evaluator shows that flattening a structure is really compiling it, which holds until the structure starts to change; the scenegraph picks up what happens when it changes a little; the spreadsheet, when that little runs through a graph; the ledger, when the sums underneath all of it were wrong to begin with; and the last, when the work finally outgrows the single machine. Each one closes on the difficulty the next one opens with.
What’s next
§52 begins with the smallest of the five: one arithmetic expression, three ways to hold it in memory, and the discovery that the layout you choose matters far less than the order you read it in.
52 - Flattening a tree is compiling it
Concept node: see the DAG and glossary entry 52.
§3 said the Vec is a table, and the trunk took it as a default: lay the data out flat and stream it. That earned its place across forty chapters of rows-of-scalars. But the simulator’s world is unusually kind to columns, and the honest question this arc asks is where the default stops paying. Start with the structure that looks least like a table: a tree.
Take a small arithmetic expression, (x + 2) * 3. It is a tree:
( * )
/ \
( + ) [ 3 ]
/ \
[ x ] [ 2 ]
To evaluate it you work from the bottom up, because every node needs its children’s values before it can do its own bit of arithmetic. At x = 4: the x is 4, the 2 is 2, the + makes 6, the 3 is 3, the * makes 18.
There are three honest ways to store that tree and walk it, and the differences between them are the chapter. Take them one at a time.
Boxes and arrows. Each node is a little record sitting wherever the allocator happened to put it, holding arrows (pointers) to its children.
#![allow(unused)]
fn main() {
enum Expr {
Const(f64),
Var,
Add(Box<Expr>, Box<Expr>),
Mul(Box<Expr>, Box<Expr>),
// ...
}
}To evaluate the *, you follow its arrow to the + node - somewhere else in memory - evaluate that (which follows two more arrows, to x and 2), then follow the arrow to 3. You hop around memory chasing arrows. This is the representation most people reach for, and the one the trunk taught you to be wary of.
The same shape, in one array. Put all the nodes in a single Vec, and let each node name its children by their position in that Vec instead of by an arrow.
#![allow(unused)]
fn main() {
struct Node { tag: Tag, lhs: u32, rhs: u32, val: f64 } // children are indices
}The nodes now sit together in memory, which is the layout the trunk prefers. But evaluating still hops from a node to its children in tree order, jumping around the array by index. The arrows became indices; the hopping stayed.
The steps, written in the order you do them. Here is the different idea. Instead of storing the tree and walking it, write the nodes down in the order you would actually compute them, every child before its parent:
x 2 + 3 *
Now you do not walk a tree at all. You read that list straight through, left to right, with a scratch pad - a stack, which just means you add to the top and take from the top:
x -> push its value pad: [4]
2 -> push pad: [4, 2]
+ -> pop two, add, push pad: [6]
3 -> push pad: [6, 3]
* -> pop two, multiply, push pad: [18]
The answer is what is left on the pad. No hopping: you touched the list once, front to back. If you have ever used a calculator with an “Enter” key, you have run a list like this; it has a name, but the mechanic is the point.
All three compute 18. That they agree, bit for bit, on every input is the floor this whole chapter stands on.1
The array on its own buys nothing
You would expect the two flat layouts to beat the boxes-and-arrows tree; the trunk spent forty chapters showing that contiguous beats scattered. Measured, only one of them does.
The one-array version does not beat the pointer tree at any size.2 Putting the nodes side by side bought nothing, because the walk still jumps from a node to its children in tree order. It just jumps by index now, and pays a bounds check on top. Index-hopping is pointer-hopping in a different coat.
The written-in-order version is the one that pulls ahead: about 1.25x faster at a hundred thousand nodes, widening to nearly 2x at two million,2 because it is the one that stops hopping and reads straight through.
The lesson, then, is the access pattern, not the array. A flat layout walked in a scattered order is scattered access with extra steps. The win was never the Vec; it was the straight-through walk.
The win has a floor and a cliff
The straight-through version does not win everywhere, and where it loses is worth being exact about.
In a band from roughly a few hundred to a thousand nodes, the straight-through version is a little slower than the pointer tree.2 The whole tree fits in cache there, so hopping between nodes is nearly free, and the scratch-pad’s push and pop is overhead with nothing to hide behind. Below the band, at a few dozen nodes, everything is small enough that the tight straight loop wins again. Above it, once the tree outgrows cache, every hop pays a cache-miss tax the straight walk avoids, and it pulls away for good.
The carve-out is usually stated as “small trees”, but it is really a cache-resident band: a tree that fits in cache does not care how you lay it out, because the expensive thing, going to memory, is free while everything is close. The flat layout starts paying only once the data is big enough that the trip to memory costs something.
That third form is compiled code
Look again at the written-in-order version. Nodes in compute order, run straight through with a scratch stack: that is a stack machine, and the list is its program. Writing a tree out as a run-it-straight list is compiling it, turning something you walk into something you run.
Compiled code has a famous weakness: you cannot edit it in place. Change the tree and the boxes-and-arrows version swings a single arrow, in time set by how deep the changed node sits - about 150 nanoseconds.3 The one-array version is cheaper still, an index repointed in about 18 nanoseconds. The written-in-order version has no cheap edit: any change to the shape breaks the order, so you write the whole list out again, about half a millisecond at a hundred thousand nodes3 - thousands of times the cost of swinging one arrow.
So the choice turns on what you do with the tree: how often do you change its shape, versus how often do you just compute it?
The crossover
Put a number on it. Any real workload is some edits and some evaluations. The pointer tree has the cheap edit and the slow walk; the compiled list has the slow edit and the fast walk. They break even at the point where the list’s faster walks stop paying back its expensive rebuilds. On this machine, that is about one edit for every four evaluations.4 Change the shape more often than that, keep the pointers. Compute it more often than that, compile it.
The break-even barely moves as the tree grows, because both the walk savings and the rebuild cost scale with the number of nodes; their ratio does not. So it is a fact about your workload, not your tree size. A spreadsheet formula typed once and recomputed on every edit elsewhere, a database query planned once and run over millions of rows, a shader built once and run per pixel: all sit far out at the compute-many end, which is exactly where the compiled form wins and exactly why those systems compile.
That is the first place the column default does not simply carry over, and a tree is what makes you say what you actually do with it. The flat array on its own buys nothing; the straight-through walk buys a lot, but only once the tree outgrows cache, and only if you will recompile when its shape changes. The reference crate is code/exprtree; the prose here is the shape of its output, and the exercises are how you make it yours.
The catch is the word “recompile.” It assumes the shape changes rarely, and all at once. The next chapter is what happens when it changes a little, and constantly.
Measurements
Dev box: Ryzen 9 270, rustc 1.94.0, --release, median of 5. Cross-machine capture (the Pi 4 / i7 / i3 columns the rest of code/ carries) is pending, so treat the shape as the claim, not the digits.
| # | what | measured |
|---|---|---|
| 1 | all three forms agree, bit for bit | contract test passes |
| 2 | straight-through vs pointer tree: tiny / cache-resident band / past cache | ~1.5x / 0.85x / 1.25x at 131K nodes, ~1.9x at 2M |
| 2 | one-array (arena) vs pointer tree | does not beat it at any size |
| 3 | one shape-change: pointer / one-array / straight-through (131K nodes) | 150 ns / 18 ns / ~496,000 ns |
| 4 | edit-to-evaluation break-even (straight-through vs pointer) | ~1 edit per 4 evaluations, ~size-independent |
Exercises
- Three forms, one number. Build the boxes-and-arrows tree, the one-array version, and the written-in-order list for the same small expression. Write the evaluator for each and check all three return the same value, bit for bit, at many values of
x. Every later exercise leans on this agreement; if it ever breaks, you are timing three different sums. - Trace the stack by hand. For
(x + 2) * 3, write out the run-in-order list and trace the scratch pad step by step, as in the chapter. Then do it for an expression of your own with at least one subtraction. Convince yourself the list never needs to look back. - The size sweep. Evaluate each form in bulk across tree sizes from a few dozen nodes to a few million. Plot nanoseconds per evaluation. Find the three regimes: the straight-through form winning when tiny, losing in a cache-resident band of a few hundred nodes, and winning more and more once the tree is too big for cache.
- The array is the control. Confirm the one-array version does not beat the pointer tree at any size. In one sentence, say why putting the nodes side by side bought nothing - what does its evaluator still do on every node? Then say, in one sentence, what the actual win was.
- The cost of editing compiled code. Implement the same shape-change - swap out a subtree - on each form, and time it at a hundred thousand nodes. Reproduce the arrow-swing, the index-repoint, and the full rewrite. Explain why the run-in-order form has no cheap edit.
- The break-even. From your edit and evaluation timings, work out the edit fraction where the run-in-order form stops being worth it. Reproduce the roughly one-edit-per-four-evaluations figure. Then, from how each cost grows with the number of nodes, argue why that break-even hardly depends on tree size.
- (stretch) Find the regime in the wild. Name three real things made of expression trees (a spreadsheet cell, a database query, a shader) and place each on the change-it-versus-compute-it line. For one, build it once and evaluate it a million times; confirm you are far out at the compute-many end, where the one-time cost of writing the list out has long since paid for itself.
Reference notes in 52_flattening_is_compiling_solutions.md.
What’s next
The run-in-order form assumes the shape changes rarely and all at once. §53 is what happens when it changes a little and often: a hierarchy where one node moves and only the nodes beneath it go stale. Recomputing everything is the compiled form’s only move; recomputing just the stale part is the next discipline - and it has a break-even of its own.
Solutions: 52 - Flattening a tree is compiling it
Numbers below are the Ryzen 9 270 figures from the exprtree crate; cross-machine capture is pending, so treat the shape as the claim, not the digits.
Exercise 1 - Three forms, one number
#![allow(unused)]
fn main() {
// Boxes and arrows: each node its own allocation, children behind pointers.
enum Boxed { Const(f64), Var, Add(Box<Boxed>, Box<Boxed>), Mul(Box<Boxed>, Box<Boxed>) }
// The same shape in one Vec: children named by index.
struct Node { tag: Tag, lhs: u32, rhs: u32, val: f64 } // arena: Vec<Node>
// The steps in compute order, run over a value stack.
enum Op { Const(f64), Var, Add, Mul } // flat: Vec<Op>
fn eval_flat(ops: &[Op], x: f64) -> f64 {
let mut stack = Vec::with_capacity(16);
for op in ops {
match op {
Op::Const(c) => stack.push(*c),
Op::Var => stack.push(x),
Op::Add => { let b = stack.pop().unwrap(); let a = stack.pop().unwrap(); stack.push(a + b); }
Op::Mul => { let b = stack.pop().unwrap(); let a = stack.pop().unwrap(); stack.push(a * b); }
}
}
stack.pop().unwrap()
}
}The contract test builds all three from the same expression and asserts eval_boxed(x) == eval_arena(x) == eval_flat(x) bit for bit across many values of x. It passes. That agreement is the floor: every timing below compares three implementations of the same arithmetic, so a divergence would mean you are timing three different sums, not three layouts of one.
Exercise 2 - Trace the stack by hand
For (x + 2) * 3 the compute-order list is x 2 + 3 *, traced in the chapter to 18 at x = 4. Take a subtraction, (x - 5) * (x + 1). Post-order writes every child before its parent: x 5 - x 1 + *. At x = 4:
x -> push pad: [4]
5 -> push pad: [4, 5]
- -> pop two, sub pad: [-1] (4 - 5)
x -> push pad: [-1, 4]
1 -> push pad: [-1, 4, 1]
+ -> pop two, add pad: [-1, 5] (4 + 1)
* -> pop two, mul pad: [-5] (-1 * 5)
The list never looks back. Each operator consumes values already on the pad and leaves one behind, so the read head only ever moves forward. Subtraction is the one to be careful with: it is not commutative, so the order of the two pops matters - the first pop is the right operand, the second is the left (a - b with a popped second), which is exactly how the evaluator above is written.
Exercise 3 - The size sweep
Evaluate each form in bulk across tree sizes and read nanoseconds per evaluation. Three regimes appear on one curve:
| nodes | boxed | arena | flat | flat vs boxed |
|---|---|---|---|---|
| 15 | 27.0 | 28.5 | 18.0 | 1.50x |
| 127 | 249.4 | 284.2 | 282.1 | 0.88x |
| 511 | 1340 | 1431 | 1610 | 0.83x |
| 8191 | 34708 | 37487 | 28751 | 1.21x |
| 131071 | 573222 | 600835 | 459304 | 1.25x |
| 2097151 | 14125889 | 15235907 | 7398149 | 1.91x |
Under about a hundred nodes the flat form wins ~1.5x: everything is register- and L1-resident, so the only thing that matters is per-node overhead, and a tight linear loop beats recursion. Through a cache-resident band of roughly 127 to 1000 nodes the flat form loses (0.83x to 0.88x): the whole pointer tree fits in cache, the chase is nearly free, and the stack’s push and pop is overhead with nothing to hide behind. Past cache it pulls ahead and keeps widening, 1.21x at 8K to 1.91x at 2M, as scattered access starts paying a cache-miss tax that sequential streaming avoids.
Exercise 4 - The array is the control
The arena sits at or below the boxed tree at every size; it never beats it. Its evaluator still hops from each node to its children in tree order - the arrows became u32 indices, but the walk jumps around the Vec exactly as the pointer walk jumps around the heap, and now pays a bounds check per access on top. Putting the nodes side by side bought nothing because the access order stayed scattered. The actual win was the straight-through walk of the flat form, which reads memory front to back; the layout was never the point, the access pattern was.
Exercise 5 - The cost of editing compiled code
Swap one subtree on each form, 4000 edits at 131071 nodes:
| rep | ns / edit |
|---|---|
| boxed | 150 |
| arena | 18 |
| flat | 495768 |
The boxed tree swings a single pointer, in time set by how deep the changed node sits. The arena repoints one u32, cheaper still. The flat form has no cheap edit: its order is the program, so any change to the shape invalidates the linear sequence, and you re-linearize the whole expression from scratch - O(N), about half a millisecond here, thousands of times the cost of swinging one pointer. This is the weakness of compiled code stated mechanically: you cannot edit it in place, because the thing that made it fast was committing to one traversal order ahead of time.
Exercise 6 - The break-even
A workload is some fraction r of edits and the rest evaluations. The boxed tree has the cheap edit and the slow walk; the flat form has the slow edit and the fast walk. They break even where the flat form’s faster evaluations stop repaying its expensive rebuilds. From the per-op costs at 131071 nodes the crossover is r* = 0.19, about one edit per four evaluations. Edit the shape more often than that and the O(N) re-linearization sinks the flat form, so keep pointers; evaluate more often than that and compile.
That ratio barely moves with tree size, because both the flat form’s per-evaluation advantage and its per-edit rebuild cost scale with N; their ratio cancels. The break-even is therefore a property of the workload mix, not the tree. A spreadsheet formula typed once and recomputed on every neighbouring edit, a query planned once and run over millions of rows, a shader built once and run per pixel - all sit far out at the compute-many end, which is why those systems compile.
Exercise 7 - Find the regime in the wild
Three real expression-tree systems, placed on the change-it-versus-compute-it line:
| system | edits | evaluations | regime |
|---|---|---|---|
| spreadsheet cell | retyped rarely | recomputed on every dependent edit | compute-many |
| database query | planned once | run over every row | compute-many |
| shader | compiled at load | run per pixel, per frame | compute-many, extreme |
All three live far past r* = 0.19. Build one expression once and evaluate it a million times and the single O(N) cost of writing the compute-order list out is amortised to nothing - the per-evaluation saving has repaid the one-time compile thousands of times over. That is the regime a bytecode VM is built for, and it is the same reason the next chapter’s full recompute is a single straight sweep rather than a tree walk.
53 - Staleness flows downhill
Concept node: see the DAG and glossary entry 53.
§52 left on a catch: compiling a tree is worth it only when the shape changes rarely and all at once. This chapter is the other case, the common one - the shape changes a little, and constantly.
Picture a jointed arm: a shoulder, an elbow hanging off it, a hand hanging off the elbow. Each joint knows only where it sits relative to its parent - its local offset. Where it actually is in the room - its world position - is its parent’s world position plus its own local offset. Lay it out and compute it bottom of the chain to top:
shoulder local 0 world 0
elbow local +2 world 2 (0 + 2)
hand local +1 world 3 (2 + 1)
Now swing the elbow out: change its local offset from +2 to +5.
shoulder local 0 world 0 (unchanged)
elbow local +5 world 5 (0 + 5) <- moved
hand local +1 world 6 (5 + 1) <- dragged along
The elbow moved, and the hand moved with it, because the hand hangs off the elbow. The shoulder did not move at all. A change flows downhill to everything beneath it, and stops there. That is the whole idea of this chapter. (Real scenes compose full rotate-scale-translate transforms instead of adding offsets, but the shape is identical: a node’s world position depends only on itself and the chain of parents above it.)
Every frame, things move, and the world positions below them go stale. There are two ways to set them right.
Recompute everything. Walk the whole hierarchy top-down and recompute every world position from scratch. If you store the nodes flat in top-down order - every parent before its children, the §52 trick again - this is a single straight sweep: each node reads a parent that was already done a moment ago. Branchless, sequential, cache-friendly.
Recompute only the stale part. When the elbow moves, mark the elbow and everything beneath it as dirty, and recompute only those. The flat top-down layout has a gift here: lay the nodes out so a node is immediately followed by all of its descendants, and a whole subtree becomes a contiguous slice. “Everything beneath the elbow” is then just a range of array positions - easy to find, and packed together in memory.
Which one wins? It depends on how much went stale, and the answer is a crossover, not a rule.
The straight sweep wins again
§52’s lesson reappears first. Recomputing everything the flat top-down way, one straight sweep, beats walking the same hierarchy as a boxes-and-arrows pointer tree by 2.3x to 2.8x from a hundred thousand to a million nodes.1 Same work, same answers; the flat sweep just reads memory in order while the pointer walk hops around it. Even the dumb option, recompute-all, is cheap because of the layout. Hold that as the baseline.
Recompute-only-what-moved has a ceiling
Now mark a fraction of the tree dirty and recompute only that part, against recomputing all of it. When little has moved, recomputing only the stale part wins enormously: at a tenth of a percent dirty it is about 900x faster, at ten percent about 5.7x, at twenty percent about 1.7x.2
It does not win forever, and where it stops depends on the machine’s memory bandwidth. On the dev box, recompute-everything takes the lead past roughly forty to fifty percent dirty; on the bandwidth-poorer reference machines the full sweep is itself dearer, so recompute-dirty keeps winning to nearly ninety percent - the dev box is the conservative end of the range.2 Recomputing only the dirty part means carrying a list of which nodes are dirty and skipping the rest, and that bookkeeping costs more than it saves once you are touching most of the tree anyway. At a hundred percent dirty the incremental version is slower than the straight sweep on every machine: all the same work, plus the bookkeeping. Recompute only what changed is a default with a ceiling - when most of it changed, stop being clever and sweep.
Whether it pays depends on whether the stale set is packed
A second axis matters more for the next chapter. Take the same number of dirty nodes and arrange them two ways: as one contiguous subtree (a joint and everything below it), and scattered all over the tree (a dirty leaf here, a dirty leaf there).
The contiguous subtree recomputes far faster than the same count of scattered leaves at identical work - about 13x apart on the dev box, narrowing to 4-6x on the older machines, but decisive on all of them.3 The dirty count was the same; only the packing differed. Recomputing the stale part pays only when the stale part is packed together in memory, so the recompute streams instead of hopping. That sharpens §28’s “recompute beats maintain”: recompute beats maintain when the thing you recompute is local.
A scenegraph is kind to this. It is a tree: every node has exactly one parent, so “everything beneath a node” is one packed slice, and the common edit - move a joint - dirties exactly such a slice. The reference crate is code/scenegraph.
But that kindness is the tree’s, not the world’s. The moment a thing can feed many things instead of hanging off one parent - the moment your dependencies form a graph rather than a tree - there is no single “everything beneath it,” no contiguous slice to recompute, and the packing you just relied on is gone. That graph is a spreadsheet, and it is the next chapter.
Measurements
Dev box: Ryzen 9 270, rustc 1.94.0, --release, median of 5; the cross-machine numbers (2012 i7, 2015 i3, Pi 4) are in code/README.md.
| # | what | measured |
|---|---|---|
| 1 | full recompute, flat straight sweep vs pointer-tree walk (100K-1M nodes) | 2.3x - 2.8x |
| 2 | recompute-dirty vs recompute-all, by how much is dirty | ~900x at 0.1%, 5.7x at 10%, 1.7x at 20%; crossover is bandwidth-dependent: ~40-50% (dev box), ~90% (slower memory) |
| 2 | recompute-dirty at 100% dirty | 0.77x (slower than the sweep: pure bookkeeping overhead) |
| 3 | same dirty count: one contiguous subtree vs scattered leaves | ~13x apart (dev box), ~4-6x on the older machines; packed always wins |
Exercises
- Move a joint by hand. Take the three-node arm from the chapter. Pick local offsets, compute the world positions, then change one joint’s local offset and recompute by hand. Write down which world positions changed and which did not, and state the rule in one sentence.
- Flat, top-down. Store a hierarchy as flat arrays with each node’s parent recorded, laid out so every parent comes before its children. Write the full recompute as a single forward loop. Confirm each node’s parent is always already done by the time you reach it.
- The straight sweep vs the pointer walk. Build the same hierarchy a second way, as boxes-and-arrows. Recompute both at a hundred thousand and a million nodes and reproduce the roughly 2.3x-2.8x gap. Say in one line why it appears, in the words of §52.
- The subtree is a slice. With the top-down layout, show that a subtree occupies a contiguous range of positions. Given a node, find “everything beneath it” as a slice, with no tree-walking.
- The dirty crossover. Mark a fraction of the tree dirty (a joint and everything below it), recompute only that, and compare against a full sweep. Sweep the fraction and find where recompute-everything takes over. Explain why the incremental version is slower than the sweep when everything is dirty.
- Packed versus scattered. Hold the dirty count fixed and compare one contiguous subtree against the same number of scattered single nodes. Reproduce the order-of-magnitude gap. State the condition under which recomputing the stale part is worth doing at all.
- (stretch) Break the tree. Let one node be read by two parents (so it is no longer a tree). Show that “everything beneath a node” is no longer a single contiguous slice, and that the packed recompute you relied on no longer applies. You have just discovered the next chapter’s problem.
Reference notes in 53_dirty_propagation_solutions.md.
What’s next
In a tree, the stale set is always one packed slice, because everything has exactly one parent. §54 is what happens when that is no longer true: a spreadsheet, where one cell feeds many, the dependencies form a graph, and “what went stale” is a shape you have to compute rather than a slice you can point at.
Solutions: 53 - Staleness flows downhill
Numbers below are the Ryzen 9 270 figures from the scenegraph crate; cross-machine capture is pending, so treat the shape as the claim, not the digits.
Exercise 1 - Move a joint by hand
Take the three-node arm with local offsets shoulder 0, elbow +2, hand +1:
shoulder local 0 world 0
elbow local +2 world 2 (0 + 2)
hand local +1 world 3 (2 + 1)
Swing the elbow to +5 and recompute. The shoulder is unchanged at world 0; the elbow becomes world 5; the hand, which reads the elbow, is dragged to world 6. The shoulder above the change never moved. The rule in one sentence: a change to a node’s local transform restates the world transform of that node and everything beneath it, and nothing else. Staleness flows downhill and stops where the subtree stops.
Exercise 2 - Flat, top-down
#![allow(unused)]
fn main() {
// nodes in DFS pre-order: every parent sits at a lower index than its children.
let mut world = vec![Affine::IDENTITY; n];
for i in 0..n {
world[i] = if i == 0 { local[0] } else { world[parent[i]].compose(&local[i]) };
}
}Because the layout is pre-order, parent[i] < i for every node, so by the time the loop reaches i its parent’s world transform is already final from earlier in this same pass. The full recompute is one forward loop with no recursion, no stack, and no revisiting - each node reads a slot that was written a moment ago and is still warm in cache.
Exercise 3 - The straight sweep vs the pointer walk
Build the same hierarchy a second way as boxed nodes with a recursive walk, and recompute every world transform both ways:
| nodes | flat sweep | pointer walk | flat speedup |
|---|---|---|---|
| 100,000 | 226,053 ns | 512,711 ns | 2.27x |
| 1,000,000 | 2,907,273 ns | 8,063,752 ns | 2.77x |
The flat sweep is 2.3x to 2.8x faster across the range. Same work, same answers, in the words of §52: the flat sweep reads memory in order while the pointer walk hops around it, and once the tree outgrows cache every hop pays a miss the sweep avoids. Even the dumb option - recompute everything - is cheap when the layout streams.
Exercise 4 - The subtree is a slice
#![allow(unused)]
fn main() {
// subtree[i] = number of nodes in i's subtree, including i (filled once at build time).
fn descendants_of(i: usize, subtree: &[u32]) -> std::ops::Range<usize> {
i .. i + subtree[i] as usize
}
}In pre-order a node is immediately followed by all of its descendants, so “everything beneath node i” is the contiguous range [i, i + subtree[i]). Finding the stale set after a joint moves is therefore a subtraction, not a tree walk, and recomputing it touches one packed run of array slots rather than chasing pointers across the heap.
Exercise 5 - The dirty crossover
Mark a joint and everything below it dirty, recompute only that range, and compare against the full sweep as the dirty fraction grows:
| dirty fraction | recompute-dirty vs recompute-all |
|---|---|
| 0.1% | ~900x |
| 10% | 5.7x |
| 20% | 1.7x |
| 40-50% | break-even |
| 100% | 0.77x (slower) |
Incremental wins enormously when little moved and the win shrinks as more goes stale, until somewhere past forty to fifty percent the branchless full sweep takes the lead. At a hundred percent dirty the incremental version is actually slower than the sweep: it does all the same arithmetic, plus the bookkeeping of carrying a dirty list and skipping nothing. Recompute-only-what-changed is a default with a ceiling - once you are touching most of the tree, stop tracking and sweep.
Exercise 6 - Packed versus scattered
Hold the dirty count fixed and arrange it two ways. One contiguous subtree recomputes about 13x faster than a full sweep; the same number of scattered single leaves runs about as slow as a full sweep, leaving the two arrangements more than 10x apart at identical work. The count was the same; only the packing differed. So the condition for incremental recompute to be worth doing at all is that the stale set is local - packed closely enough that the recompute streams instead of hopping. This sharpens §28’s “recompute beats maintain” into “recompute beats maintain when the thing you recompute is local.”
Exercise 7 - Break the tree
Let one node be read by two parents. Now it has no single position “beneath” one parent: it belongs to two subtrees at once, so there is no contiguous index range that is exactly “everything downstream of an edit.” Marking the dirty set means walking the feeds-into edges and collecting whatever they reach, and that set is scattered across the array rather than packed into a slice. The pre-order shortcut from exercise 4 no longer applies, and with it the packed-recompute win from exercise 6 evaporates. You have just rediscovered the spreadsheet: dependencies that form a graph, a stale set you must compute rather than point at, and the subject of §54.
54 - A spreadsheet is a dependency graph
Concept node: see the DAG and glossary entry 54.
§53 ended where the tree did: in a hierarchy, “everything beneath a node” is one packed slice, because each thing has exactly one parent. Take that away - let one thing feed many - and you have a spreadsheet.
Here is a tiny one. Two inputs and three formulas:
A1 = 2 (an input you type)
A2 = 3 (an input you type)
B1 = A1 * A2 = 6
B2 = B1 + A1 = 8
T = B1 + B2 = 14
Draw who-reads-whom and it is not a tree: A1 feeds both B1 and B2, B1 feeds both B2 and T. It is a graph - a dependency graph. Now edit A1 from 2 to 10. What has to be recomputed?
A1 changed
B1 uses A1 -> stale
B2 uses B1 and A1 -> stale
T uses B1 and B2 -> stale
A2 uses nothing that changed -> still correct
Three of the four formulas go stale. Not because they sit “below” A1 in some layout - there is no below in a graph - but because the change reaches them along the feeds-into edges. That reachable set is the cone of the edit. And you must recompute it in the right order: B1 before B2 before T, because each needs the fresh value of the ones it reads. Recomputing a spreadsheet is exactly that - sorting the cells so every cell comes after the ones it depends on, then computing them in that order. (§14 called this a topological sort and said the program is one; a recalc engine is that sentence made literal.)
So the move from §53 survives: recompute only the stale part. But “the stale part” is no longer a slice you point at. It is a cone you compute.
The change has a shape the UI gives you
§53 could scatter dirt anywhere across the tree. A spreadsheet cannot. The only edits a person can make are a single cell, or a fill-down - drag a formula down a contiguous run of cells. So the dirty set is never random; it is the cone of one of those edits, and its size is set by how the formulas are wired, not by chance.
That is what to sweep, then: a fill-down of k cells, a real action, growing the cone. And the result is the familiar shape - recomputing the cone wins big when k is small, and the win shrinks as the fill-down covers more of the sheet, until somewhere near “most of it” the plain full recompute takes over again.1 Same crossover as the scenegraph, driven this time by how much you actually edited.
“Incremental” does not make a sum incremental
The cone hides a twist, and it is the most useful thing in the chapter. Add one ordinary feature, a column total =SUM(B1:B1000000), and edit one cell in that column.
The cone is tiny: the one cell, the total, and whatever reads the total, a handful of cells. Recomputing it should be almost free, but recomputing the total means reading the entire column again, because a sum keeps no memory of its old value - one changed cell forces a million additions. The cone was small in count and huge in work.2
This is why “just recompute what changed” is not the end of the story for aggregates. A real engine either keeps the sum up to date by hand as cells change (add the new value, subtract the old - and watch §55 for why that is dangerous), or it accepts the re-scan and makes the re-scan cheap (the streaming patch at the end of this chapter). Either way, the lesson stands: an aggregate is not incremental just because you only touched one input. A cone can be cheap to find and expensive to pay.
Early cutoff: do not push a change that did not happen
The sharpest version replaces the sum with a MAX. Suppose the formula downstream is a MAX over a column, feeding a dashboard of a hundred thousand cells that all read that maximum, and you edit a cell that is not the maximum, to a value still below it.
Walk the cone the obvious way and you recompute the MAX, find it feeds the dashboard, and recompute all hundred thousand dashboard cells. But the MAX did not change - you edited a number below it. None of the dashboard needed touching. So add one check: when you recompute a cell, if its new value equals its old value, stop - do not mark its dependents stale, because nothing reached them. The change was absorbed.
Measured, on exactly that sheet: the obvious cone recomputes two hundred thousand cells; with the cutoff it recomputes sixteen, and runs about 54x faster.3 The principle is worth a name: validation is cheaper than recomputation. Checking “did this actually change?” costs almost nothing; recomputing everything downstream on the assumption that it did costs everything. Following the cone blindly would have recomputed the lot; the cutoff is what saves it.
At a billion cells, the program goes flat
A million cells is small. A billion is where this gets honest, and it forces a change that is itself the lesson.
The natural way to hold a formula is as a little tree of its own (it is an §52 expression, after all), one object per cell. At a billion cells that is roughly 160 GB of formula objects before a single value - it cannot be built. So you do what a real big sheet already is: you notice that a billion cells are not a billion different formulas. They are a handful of formulas stamped across huge ranges - a fill-down is one formula, repeated. Store the formula once per column - a template - and the cells become plain columns of numbers. A billion-cell sheet’s entire “program” is then a few hundred templates, a couple of kilobytes.4
That is the arc’s whole thesis turning up one level higher than expected. §52 flattened the data; at scale you flatten the program too - the formula graph collapses from a tree-per-cell into a template-per-column, and the dependency graph from a stored list of edges into an implicit rule (“this column reads that one, row by row”). Columns are the default for the program, not just the data.
Leave the RAM, and peg the memory
A billion f32 values is four gigabytes; bigger sheets are bigger than RAM. So the data lives on disk, laid out one column after another. Now the column total from earlier is the whole game, told in bytes moved.
Recompute every total and you read the entire file off disk. At a 36 GB sheet on a 30 GB machine that is about sixteen seconds of real disk reading.5 But after a real edit, only a few columns are dirty - so read only those columns back (each is a contiguous stretch of the file) and re-sum them: about a tenth of a second, a couple of hundred megabytes instead of thirty-six gigabytes.5 The patch from §28’s “recompute beats maintain,” now measured in disk traffic.
Few programs are built for the next part. Re-summing a column does not need the whole column in memory at once; read it in fixed-size tiles and add as you go. Set the tile once - say sixteen megabytes - and the program’s memory is pegged: it never holds more than a tile, no matter how tall the column or how large the sheet.6 Running out of memory stops being something you hope to avoid and becomes something that cannot happen - the process has no way to ask for more than a tile. That is the move in its purest form, and you will meet it again as a named idea in the finale: an entire class of failure made structurally impossible, not merely unlikely.
To size such a thing for your own machine, the rule is just the arithmetic: each gigabyte of RAM is 250 million f32 cells, so choose a sheet a little bigger than your RAM and smaller than your free disk. RAM < problem < disk. The reference crate is code/spreadsheet; its scale binary is the billion-cell version.
The cone, the cutoff, the templates, the pegged tiles - all of it rests on a quiet assumption: that adding the numbers up gives the right answer. The next chapter is where that assumption breaks.
Measurements
Dev box: Ryzen 9 270 + NVMe, rustc 1.94.0, --release. Cross-machine capture is pending; treat the shape as the claim.
| # | what | measured |
|---|---|---|
| 1 | recompute the cone vs recompute all, by fill-down size | wins small, loses once the fill-down covers most of the sheet |
| 2 | one-cell edit under a column SUM | tiny cone, but re-reads the whole column - not incremental |
| 3 | edit absorbed by a MAX, with vs without early cutoff | 16 cells vs 200,000; ~54x faster |
| 4 | the “program” for 1e9 cells: templates vs one object per cell | ~2 KB vs ~160 GB (cannot allocate) |
| 5 | disk pivot, 36 GB > RAM: full vs dirty-columns patch | ~16 s (whole file) vs ~0.1 s (a few columns) |
| 6 | working set, tiled | a fixed 16 MB tile, independent of column height or sheet size |
Exercises
- The cone by hand. Take the five-cell sheet from the chapter. Edit
A1and list exactly which cells go stale and in what order they must be recomputed. Then editA2instead and do the same. Explain why the two cones differ. - Recompute in order. Store cells so every cell comes after the ones it reads, and recompute a whole sheet as one forward pass. Then, given an edited cell, compute its cone (the cells it reaches) and recompute only those, in order. Check the result matches a full recompute.
- The fill-down crossover. Sweep a fill-down from one cell to the whole column and compare cone-recompute against full-recompute. Find where full takes over. Note that you cannot make a random dirty set with real edits - the cone’s shape comes from the formulas.
- The sum that is not incremental. Put a
SUMover a million-row column. Edit one cell and measure the cone recompute. Show that the cost is the whole column, not the one cell, and explain why a sum cannot be patched by touching only what changed - without keeping a running total. - Early cutoff. Build a
MAXover a column feeding many downstream cells. Edit a below-maximum cell. Recompute the cone with and without the “stop if the value did not change” check. Reproduce the large gap and state the principle in one line. - The program goes flat. Estimate the memory of one formula-object per cell at a billion cells. Then represent the same sheet as one template per column and report its size. Say what collapsed, and into what.
- (stretch) Peg the memory. Take a column sum and rewrite it to read the column in fixed-size tiles, summing as it goes, so peak memory is a constant you set. Prove it: feed it ten times the data and watch the footprint not move. Then size a sheet for your machine with RAM < problem < disk and confirm the patch reads only the dirty columns.
Reference notes in 54_recompute_the_cone_solutions.md.
What’s next
Every total in this chapter trusted that adding the numbers gives the right total. §55 is where that trust fails: floating-point addition is not associative, so the order you add in changes the answer, a naive sum of a real column can lose everything, and no layout in the world fixes it.
Solutions: 54 - A spreadsheet is a dependency graph
Numbers below are the Ryzen 9 270 + NVMe figures from the spreadsheet crate (the scale binary for the billion-cell run); cross-machine capture is pending, so treat the shape as the claim, not the digits.
Exercise 1 - The cone by hand
The five-cell sheet: A1=2, A2=3, B1=A1*A2, B2=B1+A1, T=B1+B2. Edit A1:
A1 changed
B1 reads A1 -> stale
B2 reads B1 and A1 -> stale
T reads B1 and B2 -> stale order: B1, then B2, then T
A2 reads nothing changed -> still correct
Edit A2 instead and only B1, B2, and T that descend from it go stale - but here B1 reads A2, so the chain is the same three cells. The cones differ by which inputs reach a cell along the feeds-into edges, not by any layout position: A2 feeds B1 (and onward), while A1 feeds both B1 and B2 directly. The cone is the reachable set, and it must be recomputed in topological order so each cell sees the fresh values of everything it reads.
Exercise 2 - Recompute in order
#![allow(unused)]
fn main() {
// cells stored so every formula reads only lower ids: id order is a valid recompute order.
fn recompute_all(cells: &mut [Cell]) {
for i in 0..cells.len() { cells[i].value = eval(&cells[i].formula, cells); }
}
// cone of an edit: transitive dependents via the reverse graph, recomputed in id order.
fn recompute_cone(cells: &mut [Cell], edited: usize, readers: &Csr) {
let cone = reachable_from(edited, readers); // ascending ids
for &i in &cone { cells[i].value = eval(&cells[i].formula, cells); }
}
}Storing cells in topological order makes the full recompute a single forward pass, and makes the cone recompute a walk of the reverse graph in ascending id order, which is automatically a valid recompute order. The cone result matches a full recompute exactly, because it recomputes precisely the cells a full pass would have changed and leaves the rest at values that were already correct.
Exercise 3 - The fill-down crossover
Sweep a fill-down of k cells on a 1,024,017-cell sheet (full recompute = 9.91 ms):
| fill-down k | cone | cone vs full |
|---|---|---|
| 1 | 0.0% | 16.3x |
| 1,000 | 1.6% | 13.2x |
| 5,000 | 7.8% | 7.4x |
| 20,000 | 31.3% | 2.8x |
| 40,000 | 62.5% | 1.5x |
| 64,000 | 100% | 0.99x |
The cone wins big while the fill-down is small and the win shrinks as it covers more of the sheet, until at a full-column fill-down the plain full recompute is marginally faster. You cannot drive this with a random dirty set, because no real edit produces one: a person types a single cell or drags a fill-down down a contiguous run, so the dirty set is always the cone of one of those, its size set by the formula topology rather than by chance.
Exercise 4 - The sum that is not incremental
Note the 16x ceiling in the table above, present even for a single edited cell. The reason is that the cone of any edit in that sheet includes the column SUMs, and recomputing a sum re-reads its entire column:
#![allow(unused)]
fn main() {
Formula::Sum(range) => { let mut acc = 0.0; for c in range.clone() { acc += cells[c].value; } acc }
}A sum keeps no memory of its old value, so one changed cell forces it to add the whole column again - O(column), not O(1). The cone was tiny in cell count and huge in work. A sum cannot be patched by touching only what changed unless you keep a running total and maintain it by deltas (add the new value, subtract the old) - which is cheap, and which §55 shows drifts away from the truth.
Exercise 5 - Early cutoff
A MAX over a column feeds a 200,000-cell dashboard; edit a cell to a value still below the maximum (264,009 cells total):
| strategy | recomputed | ns |
|---|---|---|
| full | 264,009 | 1,714,957 |
| cone, no cutoff | 200,017 | 1,167,641 |
| cone + early cutoff | 16 | 31,790 |
#![allow(unused)]
fn main() {
let new = eval(&cells[i].formula, cells);
if new == cells[i].value { continue; } // value unchanged: do not mark dependents stale
cells[i].value = new;
mark_dependents_stale(i);
}The edit changed a number but not the maximum, so the recomputed MAX equals its old value, the cutoff stops there, and the dashboard is never reached - 16 cells instead of 200,017, about 54x faster than full and 37x faster than the cone without the check. The principle in one line: validation is cheaper than recomputation - checking “did this actually change?” costs almost nothing, while pushing the change downstream on the assumption that it did costs everything.
Exercise 6 - The program goes flat
One formula-object per cell at a billion cells is roughly 160 GB of Box-Expr before a single value is stored, and cannot be allocated. Represent the same sheet as one template per column instead:
250 column templates = ~2,000 bytes (the entire "program" for 1e9 cells)
A billion cells are not a billion distinct formulas; a fill-down is one formula repeated, so a real big sheet is a handful of templates stamped across huge ranges. What collapsed: the formula graph went from a tree-per-cell to a template-per-column, and the dependency graph from a stored edge list to an implicit rule (“this column reads that one, row by row”). The arc’s flatten-the-data thesis turned up one level higher - at scale you flatten the program too.
Exercise 7 - Peg the memory
#![allow(unused)]
fn main() {
// re-sum a column that may be larger than RAM, holding only one tile at a time.
fn sum_column_tiled(path: &Path, col: ColumnSpan, tile_bytes: usize) -> f64 {
let mut acc = 0.0;
let mut buf = vec![0f32; tile_bytes / 4]; // the only large allocation
for tile in col.tiles(path, &mut buf) { for &v in tile { acc += v as f64; } }
acc
}
}The read holds at most one 16 MB tile no matter how tall the column or how large the sheet, so peak memory is a constant you set rather than a function of the data. Feed it ten times the rows and the footprint does not move. On a 36 GB sheet on a 30 GB machine the contrast is stark:
| operation | bytes moved | time |
|---|---|---|
| full pivot | 36.0 GB (whole file) | 15,986 ms |
| patch (3 dirty columns) | 432 MB | 99 ms |
| working set (either) | a fixed 16 MB tile | - |
The patch reads only the dirty columns, each a contiguous stretch of the file, in a tenth of a second against sixteen seconds of genuine disk reading for the full pivot. Size your own sheet by the arithmetic: each gigabyte of RAM is 250 million f32 cells, so pick a cell count a little above your RAM and below your free disk - RAM < problem < disk - and the disk-bound time appears while the footprint stays pegged. (Write the scratch file to a real disk, not /tmp, which is often a RAM-backed tmpfs and would defeat the point of leaving RAM.) Running out of memory stops being something you hope to avoid: the process has no way to ask for more than a tile, so it cannot happen - the named idea the finale returns to.
55 - The same numbers, a different total
Concept node: see the DAG and glossary entry 55.
§54 made the spreadsheet incremental, took it past RAM, and pegged its memory. Every total along the way trusted one thing: that adding the numbers gives the right answer. This chapter is where that trust breaks, and the unsettling part is that no layout fixes it. A perfectly columnar sum can still be wrong.
Add three numbers by hand, in two different orders.
1e16 + (-1e16) + 1
= ( 1e16 + -1e16 ) + 1 = 0 + 1 = 1 (the giants cancel, then the 1 lands)
1e16 + 1 + (-1e16)
= ( 1e16 + 1 ) + -1e16 = 1e16 + -1e16 = 0 (the 1 is lost, then the giants cancel)
Same three numbers. Two answers. The middle step is the culprit: 1e16 + 1 cannot be stored, because a double near ten quadrillion has no room left for a difference of one - the gap between representable numbers there is larger than 1. So the 1 is rounded away, and by the time the -1e16 arrives there is nothing left of it. Floating-point addition is not associative: the order you add in changes the sum. This is not a bug in your machine; it is how every conforming machine works, and it is the same hazard every total in the last chapter was quietly exposed to.
A real column, added naively, loses everything
Picture a ledger column, the kind any business has: a few million small entries, cents either way, and one big matching pair, a large credit and the debit that cancels it. The true total is the sum of the small entries; the giants cancel out.
Add it left to right and the running total climbs to the big number, sits there while every small entry is added and lost under it - each one below the gap, just like the 1 above - and then the big debit cancels the big credit back to near zero. The naive sum reports roughly nothing, where the true answer was the accumulated cents.1 Reverse the column and you get a different wrong answer, because a different set of small entries gets swallowed. The order decided the result, and neither order was right.
Two fixes recover the true total. Add in pairs - sum halves and halves of halves, so small entries meet each other before they ever meet the giant - and the error shrinks dramatically. Or carry the lost low-order bits in a second running term and fold them back at the end (a compensated sum). Both land on the right answer; the compensated sum costs a little more arithmetic per element.1
The timings give away a bonus: adding in pairs is also faster than the naive left-to-right sum,1 because the naive version is one dependent chain (each add waits for the last) while the paired version splits into independent pieces the machine runs at once. The accurate method is the fast one, and it is the same tree-shaped reduction the next chapter leans on.
Maintaining a total quietly drifts
Recall §54’s temptation: rather than re-read a whole column to recompute a sum, keep a running total and patch it on each edit - add the new value, subtract the old. It is cheap. It also drifts.
Start a running total from the exact sum and then maintain it only by those add-the-new, subtract-the-old steps. After millions of edits it no longer matches a fresh recomputation. The absolute gap stays small, but as a fraction of the answer it blows up exactly when the true total is itself near zero from cancellation.2 The maintained total is never quite the recomputed one, and you cannot tell by looking. This is why a real system periodically re-anchors its aggregates with a fresh recompute instead of trusting the running patch forever: the incremental total buys speed by spending correctness, a little at a time.
Layout cannot make it correct
Columns are a default, not a law - and this is the version of that with nothing to do with speed at all.
Ask a simple geometric question: given three points, does the third lie to the left or the right of the line through the first two? It is one subtraction-and-multiply formula (the sign of a cross product), and it is the atom under every triangulation, every convex hull, every “is this point inside” test in CAD and mapping and path planning.
Lay the points out in perfect columns and compute that formula in f64. For three points that are nearly in a straight line, the two big products that should almost cancel are each rounded first, and the rounded difference is dominated by noise - so the sign comes out wrong, on the order of 99% of near-collinear cases in a sweep of large-coordinate triples.3 The exact answer, computed in wide integers, is right every time, and costs about the same.3 A flawless SoA layout changed nothing: the bug was in the arithmetic, not the storage. Correctness is orthogonal to layout - you can lay the data out perfectly and still compute the wrong thing.
The fixes are real arithmetic, not real layout: add in a defined order, compensate, accumulate in a wider type, or compute the predicate exactly. None of them is what this book has been selling, and that is the point of putting them here. The reference crate is code/fpfragility.
So the totals are correctable, and once corrected and incremental the spreadsheet is honest. It is still, though, adding its numbers on a single core, and the accurate sum made the work a little heavier. The last chapter asks the question that finishes the arc: when do you actually need more hardware?
Measurements
Error figures are IEEE-754 and portable; timings are dev-box (Ryzen 9 270, --release). Cross-machine capture is pending.
| # | what | measured |
|---|---|---|
| 1 | a real ill-conditioned column: naive sum vs the true total | loses essentially the whole answer; reversing gives a different wrong answer |
| 1 | paired / compensated sum vs naive | recovers the true total; paired is also ~2x faster than naive |
| 2 | a running total maintained by deltas vs a fresh recompute | never matches; relative error explodes when the true total nearly cancels |
| 3 | left-or-right-of-line for near-collinear points: naive f64 vs exact integer | naive wrong ~99% of the time; exact correct, at ~the same cost |
Exercises
- Two orders, two answers. Add
1e16,-1e16, and1in both orders by hand, as in the chapter. Then find a triple of your own where the order changes the result, and explain which addition loses information and why. - Lose a column. Build a column of many small values with one large offsetting pair. Sum it left to right, then reversed. Show the two sums disagree and that both miss the true total (the sum of the small values, which the giants do not touch).
- Get it back. Sum the same column two better ways: in pairs, and with a compensated running term. Show both recover the true total. Time all three and note that the paired sum is not slower than the naive one - explain why, in terms of dependent versus independent additions.
- Watch it drift. Start a running total from the exact sum, then maintain it through many random edits by adding the new value and subtracting the old. Compare against a fresh recompute periodically. Show the gap never closes, and that as a fraction it is worst when the true total is near zero.
- The wrong side of the line. Implement “is the third point left or right of the line through the first two” in
f64, and again in exact integer arithmetic. Feed both many nearly-collinear triples with large coordinates and count how often they disagree. Confirm the exact one costs about the same. - (stretch) A layout cannot save you. Take any one of the above and store the inputs in perfect SoA columns. Confirm the wrong answer is exactly as wrong as before. Write one sentence on why the arc’s usual move - fix the layout - does nothing here, and what does.
Reference notes in 55_floating_point_fragility_solutions.md.
What’s next
The numbers are correct now, and the sum is still one core reading memory in order - and the accurate version made it a little heavier. §56 finishes the arc with the question the whole second act has been circling: when the work outgrows one core, what actually helps - and what only looks like it does.
Solutions: 55 - The same numbers, a different total
The error figures below are properties of IEEE-754 and portable; the timings are the Ryzen 9 270 figures from the fpfragility crate, and cross-machine capture is pending.
Exercise 1 - Two orders, two answers
(1e16 + -1e16) + 1 = 0 + 1 = 1 giants cancel first, then the 1 lands
(1e16 + 1) + -1e16 = 1e16 + -1e16 = 0 the 1 is lost first, then giants cancel
Same three numbers, two answers. The losing step is 1e16 + 1: a double near ten quadrillion has a gap between representable values larger than 1, so there is no room to store the difference and the 1 is rounded away. By the time -1e16 arrives, nothing of it remains. A triple of your own with the same shape - any tiny value added to a giant before its canceling partner arrives - reproduces it; the small addition is the one that loses information, because its magnitude falls below the spacing of representable numbers at the running total’s scale. Floating-point addition is not associative, and this is how every conforming machine behaves, not a fault in yours.
Exercise 2 - Lose a column
Build a ledger column of millions of small entries (cents either way) plus one large offsetting pair - a big credit and the matching debit. The true total is the accumulated cents; the giants cancel.
| method | result | abs error |
|---|---|---|
| kahan (reference) | -2284.45 | 0 |
| naive left to right | -0.92 | 2283.53 |
| naive reversed | -0.71 | 2283.74 |
Added left to right, the running total climbs to the big number and sits there while every small entry is added and lost beneath it - each one below the gap, exactly as in exercise 1 - and then the big debit cancels the big credit back to near zero. The naive sum reports roughly nothing where the true answer was about -2284. Reversed, it gives a different wrong answer, because a different set of small entries gets swallowed. Both orders miss the true total, which is the sum of the small values the giants never touch.
Exercise 3 - Get it back
#![allow(unused)]
fn main() {
// pairwise: split and recurse, so small entries meet each other before any giant.
fn pairwise(xs: &[f64]) -> f64 {
if xs.len() <= 64 { return xs.iter().sum(); }
let mid = xs.len() / 2;
pairwise(&xs[..mid]) + pairwise(&xs[mid..])
}
}Both better methods recover the true total. Pairwise summation drops the absolute error from ~2283 to about 8, and a compensated (Kahan) running term lands exactly on the reference:
| method | abs error | ns |
|---|---|---|
| naive | 2283.53 | 5,928,102 |
| pairwise | 8.45 | 2,659,159 |
| kahan | 0 | 9,540,640 |
The timings carry a bonus: pairwise is about 2.2x faster than naive, not slower. The naive sum is one dependent chain where each += waits for the last, while the paired version splits into independent subsums the compiler vectorizes and runs at once. The accurate method is the fast one - and it is the same tree-shaped reduction §56 leans on. Kahan costs about 1.6x the naive sum for the extra compensation arithmetic, and is exact.
Exercise 4 - Watch it drift
Start a running total from the exact sum of a million mixed-magnitude entries, then maintain it only by running += new - old through many random edits, comparing against a fresh recompute:
| edits | drift | relative |
|---|---|---|
| 100,000 | 2.56 | 7.8e-15 |
| 1,000,000 | 2.53 | 1.9e-14 |
| 10,000,000 | 3.02 | 8.7e-12 |
The maintained total never matches the recompute, and the gap never closes. The absolute drift stays small, a few units, but as a fraction of the answer it jumps about 1000x by the last row - because cancellation shrank the true total while the same few-unit error stayed put, so its share of the answer exploded exactly when the total is near zero. You cannot tell by looking, which is why a real system periodically re-anchors its aggregates with a fresh recompute rather than trusting the running patch forever: the incremental total buys speed by spending correctness, a little at a time.
Exercise 5 - The wrong side of the line
#![allow(unused)]
fn main() {
// orientation: sign of the cross product (b - a) x (c - a).
fn orient_f64(a: P, b: P, c: P) -> f64 { (b.x-a.x)*(c.y-a.y) - (b.y-a.y)*(c.x-a.x) }
fn orient_i128(a: P, b: P, c: P) -> i128 {
let bx=b.x as i128 - a.x as i128; /* ... */ bx*cy - by*cx // exact
}
}On a million near-collinear triples with ~2^30 integer coordinates, the naive f64 test disagrees with the exact integer answer on 992,697 of 1,000,000 - 99.3%. The two products are about 2^60, far past f64’s 53-bit mantissa, so each is rounded before the subtraction and the rounded difference of two near-equal giants is dominated by noise; the sign comes out wrong. The exact i128 test is right every time, and costs about the same - 1.34 ns naive against 1.38 ns exact. Correctness was nearly free here; the naive version was not buying speed, only error.
Exercise 6 - A layout cannot save you
Store the inputs of any of the above in perfect SoA columns and the wrong answer is exactly as wrong as before: the naive column sum still reports ~0, the naive orientation still flips on 99% of degenerate triples. The arc’s usual move - lay the data out flat so the access streams - does nothing here, because the error is in the arithmetic, not the storage. Correctness is orthogonal to layout. What fixes it is real arithmetic: add in a defined order, compensate, accumulate in a wider type, or compute the predicate exactly. None of those is a layout choice, which is the point of putting them in this arc - a flawless column buys you speed and nothing about being right.
56 - The ceiling is bandwidth, not cores
Concept node: see the DAG and glossary entry 56.
§55 left the work correct and incremental, and still being done by one core reading memory in order. The reviewer’s instinct at this point is loud and common: a simulation this size needs a GPU. This chapter is the honest answer, and it is mostly “no, and here is exactly why.”
Start with the simplest pass there is - advance some particles: each new position is the old position plus the velocity, times a timestep. Two multiply-adds per particle. Almost no arithmetic; the cost is entirely in moving the numbers - read a position and a velocity, write a position back. So the speed of this pass is the speed of memory, not the speed of the core.
Run it on one core across sizes and you can watch the memory hierarchy in the numbers: while the data fits in cache it runs at nearly 190 GB/s; once it spills to main memory it settles to about 23 GB/s.1 That floor - main-memory bandwidth - is the thing that matters, because real working sets do not fit in cache.
More cores stop helping
The obvious move is more cores. Split the particles across threads and measure:
1 thread 23 GB/s 1.0x
2 threads 28 GB/s 1.2x
4 threads 46 GB/s 2.0x
8 threads 51 GB/s 2.2x
16 threads 51 GB/s 2.2x
Sixteen cores do no better than eight, and the whole machine tops out around 2.2x.2 The reason is the one above: this pass is limited by the memory channel, and a single channel feeds all the cores. Past about four threads they are not computing in parallel; they are queueing for memory. The ceiling is bandwidth, not core count. You cannot out-core a memory-bound pass, and you cannot out-accelerator it either. The way to go faster is to touch less data, not to add compute - which is exactly what §53 and §54 spent their chapters doing. The whole arc has been pulling this way, and now you can see why it had to.
How much can one box keep current?
Turn the bandwidth into the number that actually decides things. In a 33-millisecond frame (30 per second), one core can bring about 32 million particles up to date; all cores together, about 70 million.3 That is the budget: how big an active set one box keeps current per frame.
Now the GPU argument falls apart on its own terms. The claim is that a billion-node world needs the GPU, but you never recompute a billion nodes: §53 and §54 taught you to recompute only the part that changed, the active cone, and a cone of a few million cells fits one core’s frame budget with room to spare. The GPU answers “how do I recompute everything, fast?”, a question the incremental discipline already stopped asking. The GPU is not slow; it is solving a problem you arranged not to have.
When the bus is the bottleneck
And when the active set genuinely is too big for the box - when you really do have more work than one machine’s memory can feed in time - is the GPU the answer even then? For a pass like this one, often not, and the numbers say why.
To run the pass on the GPU you must first ship the data across the bus to it and read the result back. For this pass that round trip moves about the same number of bytes the computation itself needs, so the comparison is really the bus against the machine’s own memory, and the cross-machine numbers make that literal. On a box whose memory feeds the pass faster than the bus moves it - the Ryzen and the 2012 i7 measured here - the round trip costs more per element than doing the pass in place, and offloading loses.4 On a bandwidth-poorer box the simple model tips the other way: the 2015 i3’s memory runs near 10 GB/s, below an assumed 16 GB/s bus, so the model reports the transfer as the cheaper option. That tip is the tell, not a win - the model charges only the bus and forgets that feeding the bus still reads the array out of that same slow memory first, so a real offload of resident data is dearer still. Either way the rule that survives every machine is the one to keep: offloading pays only when the data already lives on the GPU, or when there is enough arithmetic per byte that the compute, not the transfer, dominates. For a memory-bound elementwise pass, neither holds.
(The reference machines carry only integrated GPUs, which share the memory channel and so inherit its ceiling rather than crossing a bus. A reviewer contributed with a run of code/gpu_probe on an RTX 4070 Ti, PCIe 3.0, hosted on a Ryzen 7 5800X: CPU all-core 0.882 ns/elem at 27.2 GB/s; GPU round-trip 5.836 ns/elem, 6.6x the CPU pass; GPU resident 0.118 ns/elem, 7.5x faster than the CPU pass. The silicon is fast when data already lives in VRAM. The bus crossing is what loses.)
So the answer to “do you need the accelerator” is a measurement, not a reflex: you reach for more hardware only when the active set itself outgrows one box, not to brute-force away staleness an incremental design already avoids. Columns were the precondition for SIMD and cores and GPUs - but they are a default, not a law, and so is the accelerator.
That closes the arc. Five chapters of where the column default does not simply transfer: a recursive structure that makes you choose access pattern over storage; a hierarchy whose stale set has a ceiling and a shape; a graph whose aggregates are not incremental and whose memory you peg; arithmetic a layout cannot make correct; and a memory channel no core or bus can outrun. The honest counterweight to forty chapters of “lay it out flat and stream it” is that you now know, with numbers, where that stops being the answer.
Measurements
CPU figures: dev box (Ryzen 9 270, 16 threads), --release, median of 5; the cross-machine numbers (2012 i7, 2015 i3, Pi 4) are in code/README.md. GPU figure (row 4) from a community run on RTX 4070 Ti, PCIe 3.0, Ryzen 7 5800X host.
| # | what | measured |
|---|---|---|
| 1 | one core’s pass, in cache vs in main memory | ~190 GB/s vs ~23 GB/s |
| 2 | the same pass across cores (RAM-resident) | 1 / 2 / 4 / 8 / 16 threads -> 1.0x / 1.2x / 2.0x / 2.2x / 2.2x; plateaus at the memory channel |
| 3 | active set kept current per 33 ms frame | ~32 M (one core), ~70 M (all cores) |
| 4 | GPU offload of a memory-bound pass | RTX 4070 Ti, PCIe 3.0: round-trip 5.836 ns/elem (6.6x CPU); resident 0.118 ns/elem (7.5x faster than CPU); offload pays only when data is resident or arithmetic-heavy |
Exercises
- Watch the hierarchy. Run the advance-the-particles pass on one core across sizes from a few thousand to tens of millions. Plot the bandwidth. Find the step down from cache speed to main-memory speed, and say roughly where your machine’s last cache level ends.
- More cores, less help. Split the same pass across 1, 2, 4, 8, and all your cores. Plot the speedup and find where it plateaus. Explain, in one sentence, why a memory-bound pass stops scaling well before you run out of cores.
- The frame budget. From your single-core and all-core bandwidth, work out how many particles each can bring up to date in a 33 ms frame. This is your box’s active-set budget. Compare it to the size of the active part of a large simulation (the part that changed this frame), not the whole thing.
- The argument against the GPU. Using the budget from exercise 3, argue whether a million-cell active cone needs an accelerator. Then state precisely the case in which it would: when the active set itself, not the whole world, exceeds what the box can feed in a frame.
- The bus is the bottleneck. Write the cost model for offloading the pass: bytes shipped to the device, plus bytes read back, at an assumed bus speed, versus the measured CPU time per element. Find the break-even arithmetic intensity. Confirm that for two multiply-adds per element, offloading a memory-bound pass loses.
- (stretch) Touch less, not more. Take any pass from an earlier chapter and make it faster two ways: throw cores at it, and shrink the working set it touches (compute only the active part). Compare. Argue which lever the rest of this arc has been pulling, and why it beats the hardware lever for the workloads here.
Reference notes in 56_bandwidth_is_the_ceiling_solutions.md.
What’s next
That is the last technique. What remains is to say what all of it was for - and it is not speed. §57 collects the whole book into a single claim: that the structure you have been building does not merely run fast, it makes whole categories of failure impossible to write. The arc’s pegged memory was the freshest instance; the finale names the rest.
Solutions: 56 - The ceiling is bandwidth, not cores
The CPU figures below are the Ryzen 9 270 (16 threads, dual-channel) figures from the heterogeneous crate; cross-machine capture is pending. The GPU figures are a labelled cost model with assumed constants, not a measurement - there is no GPU on the reference machine.
Exercise 1 - Watch the hierarchy
#![allow(unused)]
fn main() {
// advance the particles: two multiply-adds per element, all the cost is moving the numbers.
for i in 0..n { px[i] += vx[i] * dt; py[i] += vy[i] * dt; }
}Run it on one core across sizes and the cache hierarchy shows up directly in the bandwidth:
| elements | footprint | ns/elem | GB/s |
|---|---|---|---|
| 4,096 | 0.1 MB | 0.127 | 188.6 |
| 65,536 | 1.0 MB | 0.151 | 158.6 |
| 1,048,576 | 16.8 MB | 0.282 | 85.1 |
| 16,777,216 | 268.4 MB | 1.027 | 23.4 |
The step from ~190 GB/s to ~23 GB/s is the data spilling out of cache into main memory. The drop sets in once the footprint passes the last-level cache - here between 1 MB and 17 MB, so the L2/L3 boundary on this box. Because the pass does almost no arithmetic, its speed is memory speed, and the RAM-resident floor of ~23 GB/s is the number that matters: real working sets do not fit in cache.
Exercise 2 - More cores, less help
Split the same RAM-resident pass across threads:
| threads | GB/s | speedup |
|---|---|---|
| 1 | 23.2 | 1.00x |
| 2 | 28.3 | 1.22x |
| 4 | 46.1 | 1.99x |
| 8 | 50.7 | 2.19x |
| 16 | 50.6 | 2.18x |
Sixteen cores do no better than eight, and the machine tops out around 2.2x. A memory-bound pass stops scaling well before you run out of cores because a single memory channel feeds all of them: past about four threads the cores are not computing in parallel, they are queueing for memory. The ceiling is the channel, not the core count.
Exercise 3 - The frame budget
From the all-core bandwidth and a 33 ms frame (30 Hz), work out how much one box keeps current per frame:
- one core: ~32.2 million elements per frame;
- all cores: ~70.3 million elements per frame.
That is the active-set budget. Compare it not to the whole world but to the active part - the cells that changed this frame. A simulation can hold a billion nodes and still touch only a few million in any given frame, and a few million sits comfortably inside one box’s budget. The number that decides whether you need more hardware is the size of the active set, not the size of the world.
Exercise 4 - The argument against the GPU
A million-cell active cone is well under the ~32 M one core keeps current per frame, so it needs no accelerator at all - it fits a single core with room to spare. The GPU answers “how do I recompute everything fast?”, but the incremental discipline of §53 and §54 already stopped recomputing everything; it keeps only the active cone current. The precise case in which you would reach for more hardware is when the active set itself - not the whole world - exceeds what one box can feed in a frame. That is a measurement about the size of what actually changes, not a reflex triggered by the size of the data.
Exercise 5 - The bus is the bottleneck
ship to device: 16 B/elem read back: 8 B/elem round trip: 24 B/elem
transfer cost @ ~16 GB/s PCIe = 1.500 ns/elem
CPU all-core pass = 0.474 ns/elem
To offload one pass of CPU-resident data you move about the same number of bytes the computation itself needs, and just shipping it across the bus and back costs 1.5 ns/elem against the CPU’s 0.474 ns/elem for the whole pass. The round trip alone is already slower than doing the work on the box. The break-even is an arithmetic-intensity argument: offload wins only when there is enough compute per byte that the transfer is hidden, or when the data already lives on the device. For two multiply-adds per element - a memory-bound pass - neither holds, so offload loses. (Plug your own bus and launch numbers into the same model; the structure is the point, not these assumed constants.)
Exercise 6 - Touch less, not more
Take a pass from an earlier chapter and speed it up two ways. Throwing cores at it buys about 2.2x before the memory channel saturates and the extra cores wait on RAM. Shrinking the working set - computing only the active cone, as §53 and §54 did - buys orders of magnitude when little changed (the scenegraph’s ~900x at 0.1% dirty, the spreadsheet’s 16x for a single edit), because it moves less data through the one channel that gates everything. The hardware lever is capped by the channel; the touch-less lever attacks the thing the channel is busy with. That is the lever the whole arc has been pulling, and for these workloads it beats buying more hardware - you go faster by moving fewer bytes, not by adding compute that then queues for memory.
57 - What cannot happen
§50 closed the operations leg with a single observation: its four chapters were not four tricks but one move made four times - take a failure that used to need a person’s vigilance, and turn it into a property the system holds. The limits arc that followed (§52 to §56) made a sharper version of the same move and left it fresh in your hands: a working set pegged to a tile, so running out of memory cannot happen - not “is unlikely,” cannot. Step back from the whole book and that move is everywhere, and at its limit it is always the same. The weak version is “turn the failure into a property you assert.” The strong version, the one worth ending on, is “choose a structure in which the failure cannot be written.”
That is the quiet thesis of everything you have built, and the book has never stopped to say it plainly: not fewer bugs through care, but whole categories of bug absent from the design space, because the shape you chose has no room for them. You have met each one in passing, stated locally and left there. Here is the sum.
The roll-call
Each line below is the same trade. On the left is what most systems do: meet the error at runtime and defend against it, on every request, for the life of the system. A lock around the shared write. A retry when the run will not reproduce. A null check before the dereference. A review comment asking where that print came from. A restart loop for the process that ran out of memory. The defenses are real work, they run forever, and they fail - a lock you forgot to take, a retry that hides the bug instead of fixing it, the one code path the null check missed.
On the right is what you did instead: pay once, in the structure, and the error class is gone.
| What can go wrong | The usual defense, paid every run | Why it cannot happen here |
|---|---|---|
| Two writers race the same data | locks, mutexes, careful review | a table has exactly one writer (§25) - there is no second writer to race |
| The run will not reproduce | retries, “works on my machine” | order is defined, not incidental (§16, §48) - same seed, same bits |
| A function writes where you cannot see it | code review, grepping for print | systems declare their read and write sets, and I/O lives only at the boundary (§13, §35) - there is nowhere to hide one |
| A stale id reads the wrong entity | “is this handle still valid?” | the id carries a generation (§23) - a recycled slot fails the check instead of answering wrongly |
| “Done” that was never saved; a torn write | hope, and a later incident review | acknowledge only once the write is durable; atomic rename and idempotent replay (§46) |
| Out of memory | a try/catch that cannot catch it; restart | the working set is pegged to a tile you choose (§54) - the process cannot ask for more |
Six classes of failure that, in the structure this book builds, are absent rather than merely handled well.
Capex, not opex - for correctness this time
This is the book’s frame, leverage not virtue, in its last and sharpest form. §45 argued that operating cost is capital paid once set against rent paid forever, and that the single-node in-memory discipline is, read off the balance sheet, a way to buy low rent. The roll-call is that argument made about correctness.
Defending against an error class at runtime is rent. It costs work on every request and a person’s attention for as long as the system runs, and you never stop paying. Removing the error class in the structure is capital: bought once, and then free. You did not out-discipline the people fighting these bugs. You stopped paying the tax they pay, by choosing a shape where the bill never arrives. That is the same move §45 made for the cost of running the system, now made for the cost of trusting it - the second act’s economics, finishing their own sentence.
The price, named exactly
None of this is magic, and an impossibility you cannot bound is advice you cannot trust, so be exact about what it costs. Each guarantee holds only while you hold its discipline.
Determinism is structural while the order is defined; let one HashMap iteration or one undefined reduction order slip in and “same seed, same bits” reverts to a coin you flip. Out-of-memory is impossible only in the part of the pipeline you actually pegged - §54 pegs the read and leaves the rest as an exercise on purpose, so you feel exactly where the guarantee starts and stops. The list of disciplines is short: one writer per table, a defined order, I/O at the boundary, a generation on every id, durable-before-acknowledged, a pegged working set. The leverage is that the same SoA and event-batch structure hands you all of them at once, for one decision. But they are disciplines, not defaults the language enforces for you. Drop one and its impossibility quietly becomes an ordinary bug again.
That is the honest shape of the claim: these bugs cannot be written here, as long as you keep these six disciplines, and the structure makes keeping them the path of least resistance.
What you own
The book opened by promising you would build things you own. This is what that turned out to mean.
Not only that you wrote the code instead of renting it, though you did. The thing you own is the set of impossibilities: the bugs that cannot occur in the structure you chose, the failures you will never debug because there is no path to them. A framework gives you features and keeps the impossibilities for itself - you cannot see what it has ruled out, or where it has not, until the night it has not. You can see exactly what yours holds, because you can name each exclusion and the single discipline that buys it. That list - short, exact, and yours - is the asset. The code is only where it lives.
The simulator in the next room is still running. Nobody is watching it; it cannot run out of memory; it will give tomorrow the answer it gave today; and there is no version of it that quietly corrupts itself at 3 AM - not because you are vigilant, but because you built it where those things have no room to happen. That is the leverage this book was always about. Keep the discipline, and it keeps the promise.
A last audit
- Take the roll-call to your own system - or to the simulator, if it is the largest thing you own. For each of the six classes, write one sentence: is it excluded by structure, defended at runtime, or still open? Be ruthless about the difference between “we hold a lock” and “there is no second writer to race.”
- Pick one row where you are defending at runtime. Name the discipline that would turn the defense into an exclusion, and the cost of adopting it. Decide, on paper, whether that capital is worth the rent it retires. Sometimes it is not - and now you can say so in those words.
- Find one place where order is incidental - a
HashMapiterated, a reduction left unordered, a sum that changes with the thread count. Either define the order, or write down why nondeterminism is acceptable there. There is no third option that is honest. - (stretch) Peg something. Take one unbounded buffer in code you own - a read, a batch, an accumulation - and convert it to a fixed-size tile, so its peak memory is a constant you set rather than a function of the input. Then prove it: feed it ten times the data and watch the footprint not move.
Where to go next
- Read Mike Acton’s “Data-Oriented Design and C++” (CppCon 2014). Forty-five minutes; the most concentrated case for this approach you will find.
- Read Casey Muratori’s Handmade Hero episodes on grid storage and cache locality. Another route to the same conclusions.
- Open Bevy’s
bevy_ecscrate. You will recognise every pattern. The names will differ; the shapes are identical. - Extend the simulator. The genetics and predator-prey extensions flagged in the simulator spec break new ground without leaving the framework you have already built.
The book ends here. The simulator does not - it runs as long as you keep the discipline.
The Concept DAG
Forty-three concepts the book teaches, with prerequisites drawn explicitly. This is the spine - every section, exercise, and track opening must trace back to a node here. If a candidate piece of content does not, it is either missing from this DAG (amend the DAG) or out of scope (drop the content).
How to read this
Each numbered node is one concept the student must internalize. The text under each node is the definition we will use; it is not the prose the book will teach with. Edges express prerequisites: B depends on A means B’s exercises only make sense once A has been felt, not just stated.
The DAG is published in the book’s front matter. Students see it. Instructors use it to re-cut the book for shorter or longer courses.
How to amend
Comment by node number (e.g. “node 17 - definition is too narrow”) or edge (e.g. “edge 13 → 35 isn’t a real prerequisite”). I’ll revise this file before any prose is written.
The diagram

Open the full-resolution DAG in a new tab.
Nodes
Foundation (1-4)
-
The machine model. Memory is one long array of bytes. The CPU does arithmetic on small numbers fast, fetches from cache fast, fetches from main memory roughly 100× slower, and chases pointers blindly. This asymmetry - not the algorithm - sets the speed of most real programs.
-
Numbers and how they fit.
u8,u16,u32,u64,i32,i64,f32,f64. Width is a budget choice that decides how many things fit in a cache line. Floats are not real numbers; they have a finite set of values and edges where arithmetic stops behaving. -
The
Vecis a table.Vec<T>is a contiguous run ofTin memory, addressed by index. It is the unit out of which the rest of the book is built. -
Cost is layout - and you have a budget. The same algorithm runs at different speeds depending on where its data sits in memory; layout decides the constant factors that dominate at the scales we care about. Every program has a frequency target (a game runs at 30Hz; a market data system runs at 1kHz; a control loop at 1MHz) which sets a per-tick budget in milliseconds. Operations are counted against that budget - in microseconds, or nanoseconds for tight inner loops - and design choices set its upper bound.
Identity & structure (5-10)
-
Identity is an integer. An entity is a
usize(oru32). It names a slot in the world’s tables, not a thing in itself. Pointers, references, and “the object” all dissolve into this. -
A row is a tuple. A coherent set of values that describe one entity travel together - but only if you keep them together. If you split them across tables, you must keep their indices aligned.
-
Structure of arrays (SoA). Each field of a row gets its own
Vec, indexed by entity. The opposite layout (Vec<Struct>, AoS) is a tradeoff to be earned, not the default. -
Where there’s one, there’s many. Code is written for the array. The single-instance case is just N=1; it does not need its own abstraction. A card game with 52 cards is three arrays - suit, rank, location (deck/hand/discard) - not 52 objects.
-
The sort breaks indices. Rearranging rows for locality breaks any external reference that pointed at a slot. The student must feel this pain before the next node makes sense.
-
Stable IDs and generations. A separate
idcolumn gives a name that survives sorting. Agenerationcounter on top gives a name that survives recycling, so an old reference cannot be confused with a new occupant.
Milestone after node 10 - the card-game project. Three arrays of 52 (suit, rank, location); shuffle and sort by index. Frequently expected to take hours in OOP and to take minutes here. Students sometimes look at the result like it is cheating; that reaction is the conversion. The card game is also the simplest case of one design choice that shapes everything later: the table has a constant quantity. There are 52 cards, always; the array never grows or shrinks. Variable-quantity tables - creatures that are born and die, packets that arrive - come in Memory & lifecycle, and they are why
swap_remove, dirty markers, and generational IDs exist. The card game primes the next phase: a turn is a tick, dealing is a system, the deck/hand/discard are tables.
Time & passes (11-16)
-
The tick. Programs run in discrete passes. State at the start of a tick is read; state at the end is written; nothing is half-updated mid-tick. The tick has two natural shapes - turn-based (the loop advances when an event arrives, the next-event timestamp drives the schedule; a card game is the canonical example) and time-driven (the loop runs at a fixed rate, e.g. 30Hz, with a per-tick budget around 33ms). Both are tick loops; the difference is what drives the next pass. Even an interactive program is one of these.
-
Event time is separate from tick time. Events carry their own timestamps, independent of when the loop processes them. The tick rate is how often the loop runs; the event clock is the simulation’s internal time, and it can be arbitrarily fine. A 30Hz loop can resolve microsecond-precision events because the clock lives on the data, not on the loop. Conflating the two is the most common error in event-driven and physical simulation work - students think their model is limited to the tick’s resolution; it is not.
-
A system is a function over tables. Systems declare their inputs (read-set) and outputs (write-set). They have no hidden state. The signature is the contract. Every system takes one of three shapes: an operation (1→1, every input row produces one output row), a filter (1→{0,1}, every input row produces zero or one), or an emission (1→N, every input row produces zero or more). These are the same shapes as familiar database operations -
sort,groupby,filter,join,aggregate- over component arrays. Even observability is a system: an inspection system holds read references to other systems’ tables, instantiated only when transparency is needed; in production it is absent, not gated. -
Systems compose into a DAG. The order of systems is given by who reads what who wrote. The program is a topological sort of this graph; choose the sort, and the program runs. Designing the system order is the same problem as designing a database query plan: each system is a stage, the DAG is the plan, and the program executes the plan. Students who follow this thread end up writing their own minimal query engine without realising it.
-
State changes between ticks. Mutations buffer; the world transitions atomically at tick boundaries. This is the structural reason systems compose at all.
-
Determinism by order. Same inputs + same system order = same outputs. Reproducibility is structural, not a quality goal. It is what makes replay, testing, and the simulator’s sanity possible.
Existence-based processing (17-20)
-
Presence replaces flags. “Is hungry” is membership in a
Hungrytable, not aboolonCreature. State is structural, not flagged. If a peer is inestablished_contacts, it is admitted; if not, it is not - the check is O(1) and requires no I/O. -
Add/remove = insert/delete. A state transition is a structural move: insert a row in one table, remove a row from another. There is no
setHungry(true). Naive structural changes inside a system pass break iteration, which is what node 22 fixes. -
Existence-based dispatch. A system iterates over the table whose presence defines its applicability. There is no per-row branch checking “does this case apply to me”.
-
Empty tables are free. No rows means no work. A simulation with 90% inactive entities does no work for the inactive ones - the dispatch never visits them.
Memory & lifecycle (21-25)
-
swap_remove. Deletion in O(1) by moving the last row into the deleted slot. Order is sacrificed for speed; the next two nodes fix the consequences. This phase only matters for variable-quantity tables - those that grow and shrink at runtime (creatures, packets, in-flight tasks). Constant-quantity tables like the 52-card deck need none of it. -
Mutations buffer; cleanup is batched. Adds and removes during a tick are not applied immediately; they are recorded as dirty markers in side tables (
to_insert,to_remove). At the tick boundary, a single sweep applies them all. This is the implementation of node 15: structural changes happen between passes, not during them. Without it, naive mutation inside a system causes O(N) reallocations per tick and breaks the iteration the system is in the middle of. -
Index maps. A parallel array from a key to a position, with a sentinel for absent, in two instances:
id_to_slotmaps a stable entity to its current slot (so id-held references survive reordering), and a sparse set maps a slot to its position in a membership table (O(1) test and unsubscribe, no per-creature boolean). Updated on every move -swap_remove, sort, the buffered-cleanup sweep. -
Append-only and recycling. Two strategies for slot reuse, with opposite tradeoffs in memory and reference stability. The choice is decided by access pattern, not taste.
-
One writer, many readers. Each table is written by exactly one system; many readers are fine. This is the rule that makes parallelism possible without locks, and it is the precondition for the inspection-system pattern (read-only access to all tables, no risk of races).
Scale (26-30)
-
Subscription tables, keyed by slot. A system that processes a subset iterates the slots it subscribes to and indexes the columns directly, instead of scanning every entity and branching. Keyed by slot, not entity id, so the hot loop carries no id-to-slot redirection; cleanup reindexes the table when slots move.
-
Working set vs cache. The size of the data the inner loop touches per pass decides speed more than the algorithm. If it fits in L1/L2, the loop is fast; if it does not, no algorithm saves you.
-
Proximity is a property of position. Who is near here is a function of position, which motion already streams. Bin entities into cells (a dense counting sort recomputed each tick) instead of maintaining a bolt-on spatial index; locality of the gather is the node 24/26 compaction ordered by cell. The same idea globally: one centroid or leader, read by all, replaces all-pairs coordination.
-
The wall at 10K → 1M. What changes when allocations cannot be casual: pre-sized buffers, no per-frame heap traffic,
swap_removeinstead ofremove, batched cleanup, consciously chosen layouts. The design budget from node 4 starts to bind. -
The wall at 1M → streaming. What changes when the table no longer fits: snapshots, sliding windows, log-orientation. The world becomes a window over the log.
Concurrency (31-34)
-
Disjoint write-sets parallelize freely. Two systems that write to disjoint tables can run in parallel without coordination. No locks, no atomics. This is what node 25’s ownership rule buys.
-
Partition, don’t lock. When one system must write a single table from multiple threads, split the table by entity range. You partition the data, not the access.
-
False sharing. Two threads writing to different fields in the same cache line slow each other down through hardware. Discovered, not avoided in advance.
-
Order is the contract. Parallelism is allowed inside a step (between systems with disjoint writes), never across steps. Determinism (16) depends on this discipline.
I/O, persistence, recovery (35-38)
-
The boundary is the queue. Events flow into the world on one queue, results flow out on another. Inside, the world is pure transformation - no I/O, no time, no environment. Everything that crosses the boundary goes through a storage system (38).
-
Persistence is serialization of tables. A snapshot is the world’s tables written as a stream of (entity, key, value) triples - the same shape the world has in memory. Recovery is reading them back. There is no separate “domain model” to map.
-
The log is the world. An append-only log of events is the canonical state; the world’s tables are the log decoded into SoA. The log’s structure is literally the same as the world’s: rows with field codes, values, and presence - the same
(rid, key, val)triples either way. Replay reconstructs the tables; serialise the tables and you produce a log. They are two views of one thing, not two related things. -
Storage systems: bandwidth and IOPS. A storage system is the part of the program that crosses I/O - to disk (HDD/SSD/NVMe), to network, to a service. Its limits are bandwidth (bytes per second) and IOPS (operations per second), and both must be counted against the tick budget from node 4. SQLite is one specimen of a storage system; a TCP socket is another; a network filesystem is a third. The pattern - single owner, batched writes, asynchronous flush - is the same.
System of systems (39)
- System of systems. Not all systems run every tick to completion. Some computations exceed the tick budget, run on their own cadence, or live entirely outside the simulator. Three patterns handle this. Anytime algorithms return their best current answer when the deadline arrives; quality scales with time available (CP-SAT, Monte Carlo Tree Search). Time-sliced computation divides work across ticks with progress as part of the system’s state (a spatial search that scans cells across many ticks). Out-of-loop computation runs on a separate thread, process, or machine, and delivers results into the input queue when ready (game AI, optimisation services). The unifying principle: a system has a cadence, and the cadence does not have to be one tick.
Discipline (cross-cutting, 40-43)
-
Mechanism vs policy. The kernel of a system exposes raw verbs. Rules - what is allowed, what triggers what - live at the edges, not in the kernel. Confusing the two is how systems calcify.
-
Deferred abstraction. Write the concrete case three times before extracting. Don’t pre-architect. The from-scratch version is also the dependency-pricing test: most crates lose the comparison.
-
You can only fix what you wrote. Foreign libraries are allowed; this is not a prohibition. But every dependency is a bet that someone else will keep it working. If the bet loses, you cannot fix it - you can only replace or fork it. The discipline is to take the bet consciously, knowing that the from-scratch version (node 41) is the cheapest way to find out whether the dependency is worth it.
-
Tests are systems; TDD from day one. From the first exercise onward, every concept is approached test-first: what’s the smallest case? what’s the largest? what should the answer be for
u8, foru32, for 10 000 agent ids? Tests are not a separate framework - they are systems that read tables and assert. A test rig is structurally identical to an inspection system. Property tests over component arrays and integration tests by replay log fall out of the structure, rather than being a separate effort.
Track delivery
Each of the five M5 track openings (multicore, data, multiplayer, twitter, multi-agent) must deliver the student to at least nodes 1-16 (foundation through determinism by order) in domain-native language, without naming the concepts. From there the trunk takes over.
Each track touches different downstream nodes in passing - those are previewed, not taught. The trunk is where they get named and connected.
| track | naturally previews |
|---|---|
| multicore | 25, 27, 31, 32, 33, 34 |
| data | 7, 26, 27, 28, 35, 38 |
| multiplayer | 12, 15, 16, 22, 34, 37 |
| 7, 8, 19, 24, 35, 36, 38 | |
| multi-agent | 12, 13, 17, 18, 19, 20, 22 |
A node previewed in a track must still be properly taught in the trunk; the preview gives the trunk something to recognise, not something to skip.
What this book covers, and what it does not
In scope and developed in full:
- All 43 nodes above, including event-clock simulation, log-as-world recovery, deterministic parallelism, and storage-system thinking.
- The student finishes the book able to design and implement a real single-node, in-memory ECS application - including persistence, replay, parallel execution, and an inspection system for observability.
The book stands alone. The student does not need any prior reading and does not need follow-up reading to use what they have learned.
Adjacent topics deliberately not in scope, with the monograph (MONOGRAPH_PATH) as natural further reading for those who want them:
- Distributed ECS across multiple machines (state partitioning, ownership transfer, cross-node synchronisation).
- The API-Compiler - compile-time enforcement of system contracts.
- Advanced temporal patterns: rollback, rewind, time-travel debugging, multi-timescale integration.
The afterword names the monograph as a sequel for the curious, not as a continuation the book depends on.
Changes since v1
- Added node 12 (event time vs tick time) - discrete-event clock framing now in scope, in response to “this book should stand on its own.”
- Added node 22 (mutations buffer; cleanup is batched) - dirty-markers / batched cleanup as the implementation of node 15, with the O(N)-allocation pitfall called out.
- Reframed node 4 (was “cost is layout”) - coupled with the budget framing: tick rate sets ms-budget per tick, operations count in ppm of a second.
- Reframed node 13 (system as function) - inspection-system named as canonical example, drawing on the InspectionSystem pattern in
~/code/ppdn/SYSTEMS.md. - Strengthened node 17 (presence replaces flags) - added the
established_contactsadmission example from SYSTEMS.md as a concrete one-liner. - Strengthened node 37 (log is the world) - explicit structural-equivalence framing, embodied in the
code/loggercrate: the log’s(rid, key, val)triples are the same shape as the world’s SoA tables. Title changed from “log is truth” to “log is the world”. - Reframed node 38 (was “SQLite as boundary store”) - generalised to “Storage systems: bandwidth and IOPS”; SQLite demoted to a specimen alongside sockets and network filesystems.
- Reframed node 41 (was “you own what you wrote”) - discipline as recommendation, not prohibition: foreign libraries allowed, but you can only fix what you wrote.
- Reframed node 42 (was “tests are tables and replays”) - TDD-from-day-one framing; tests are systems; same code path for inspection in debug and assertions in tests.
- Replaced “Handoff to the monograph” with “What this book covers, and what it does not” - book stands alone; monograph is further reading, not the destination.
- All nodes in phases T, M, SC, C, IO, D renumbered to accommodate the two new nodes. Track-delivery table and edges updated.
- v1 open issues 1-6 resolved in conversation.
Changes since v2
- Refined node 11 (the tick): added the turn-based vs time-driven distinction explicitly, framing both as tick loops, with the card game as the turn-based exemplar.
- Refined node 13 (system as function over tables): added the database-operations analogy - every system is a
sort/groupby/filter/join/aggregateover component arrays. - Refined node 14 (systems compose into a DAG): added the query-plan framing - designing system order is the same problem as designing a query plan; following this thread gets students to a minimal query engine.
- Added phase milestone after node 10: the card-game project - three arrays of 52, index-based shuffle/sort. Bridges Identity & structure into the turn-based shape of node 11.
Changes since v3
- Refined node 13 (system as function): added the operation / filter / emission shape vocabulary (1→1, 1→{0,1}, 1→N) before the database-operations list, drawn from Fabian’s EBP chapter.
- Strengthened the card-game milestone: introduced constant-quantity vs variable-quantity tables as the design distinction the rest of the book leans on. Card game = constant; creatures and packets = variable. This labels the entire Memory & lifecycle phase as the variable-quantity phase.
- Strengthened node 21 (
swap_remove): added a one-liner labelling the phase as variable-quantity-only - constant-quantity tables don’t need any of it. - Considered and rejected Fabian’s “data is type, frequency, quantity, shape and probability” as a node - too academic for entry-level; the constant/variable distinction does the same pedagogical work concretely.
Changes since v4
- Reframed node 4 (cost & budget): dropped the parts per million of a second framing in favour of plain microseconds (and nanoseconds for inner loops). Pure stylistic simplification, no semantic change. Propagated through node 4’s definition, the §4 chapter prose and exercises, the §4 solutions, and the glossary entry.
Changes since v5
- Added node 39 (System of systems) as a new phase between I/O & persistence and Discipline. The new node names the patterns for work that does not fit the standard tick model (anytime algorithms, time-sliced computation, out-of-loop computation). Discipline shifts from 39-42 to 40-43; the trunk now has 43 nodes instead of 42.
- Renumbering propagated through the §38 forward link (now points at the new §39), every cross-reference in chapters and solutions, the glossary’s entries 40-43 (was 39-42), all see-also lines that named the renumbered concepts, and the closing chapter §43’s “forty-three nodes” / “forty-three concepts” framing.
Glossary
Canonical wording for the 43 nodes in concepts/dag.md. Each entry gives the teaching definition (the words the book will use), one concrete example drawn from the through-line simulator, the card-game milestone, or one of the track openings, the anti-pattern the concept exists to displace, and cross-references to related nodes.
This file is the second half of M1 and is paired with the DAG: change a definition here, change the node there.
Format
Each entry has four parts:
- Definition - what we say.
- Example - how it shows up in an exercise. Drawn from the through-line simulator, the card-game milestone, or one of the five track openings.
- Anti-pattern - what students reach for instead, and why this concept rejects it.
- See also - cross-references by node number.
1 - The machine model
Definition. A computer is a long array of bytes with a CPU that reads and writes them. Reading from cache (L1/L2/L3) is fast; reading from main memory is roughly 100× slower; chasing a pointer is reading from memory at an unknown address. The cost of an operation is dominated by where the data is, not by how clever the algorithm is.
Example. In the §0 toy simulator, 100 creatures × four f32 fields × 4 bytes is around 1.6 KB - comfortably in L1 cache. The motion loop runs without ever leaving the cache. At §1 with 10,000 creatures, the same fields total 160 KB - out of L1, still in L2. At §2 with a million, you are in main memory and the loop costs change by an order of magnitude. None of this is hypothetical; it is what the working program will do.
Anti-pattern. Programming as if memory access were free. The cost asymmetry shows up the moment the simulator gets non-trivial; treating it as a footnote leads to programs that are unfixably slow at the scales the rest of the book targets.
See also. 2 (numbers), 4 (cost & budget), 27 (working set), 29 (10K-to-1M wall).
2 - Numbers and how they fit
Definition. Integers and floats come in widths: u8 (0..256), u16, u32, u64, i32, i64, f32, f64. Width is a budget choice - narrower types fit more values per cache line. Floats are not real numbers; they have a finite set of representable values and edges where arithmetic stops behaving (denormals, infinities, NaN).
Example. A 52-card deck stores suits: u8 and ranks: u8 because four suits and thirteen ranks fit easily; u32 would waste 75% of every cache line. The simulator’s creature.energy is f32 - fast, fits twice as many entries per line as f64, and the precision is more than enough for fuel accounting.
Anti-pattern. Reaching for i64 and f64 reflexively because they are “safe defaults”. They are safe; they are also half the throughput on cache-bound loops. Pick the narrowest type that holds your range and document the choice.
See also. 1 (machine model), 3 (Vec is a table), 27 (working set vs cache).
3 - The Vec is a table
Definition. Vec<T> is a contiguous run of T values in memory, addressed by index. It is the primitive out of which every component table in this book is built. A Vec<u32> of length N is N × 4 bytes laid out in order; vec[i] is one pointer addition and one memory load.
Example. The card-game suits, ranks, and locations are three Vec<u8> of length 52. The §0 simulator’s creature.pos is a Vec<[f32; 2]> of length 100. Every concept in the book lands on one or more Vec<T>. There are no other primitive containers in the trunk.
Anti-pattern. Reaching for HashMap, BTreeMap, LinkedList, or any allocator-per-element structure when a Vec and an integer index will do. These all break sequential access, which is what nodes 1 and 4 are about. Use them only when the access pattern genuinely demands it - and demonstrate that in a benchmark first.
See also. 1 (machine model), 5 (id is an integer), 7 (SoA), 27 (working set).
4 - Cost is layout - and you have a budget
Definition. The same algorithm runs at different speeds depending on where its data lives in memory. Asymptotic complexity tells you whether the algorithm scales; layout decides the constant factor that dominates at the scales we care about. Every program has a frequency target - a game runs at 30 Hz, a control loop at 1 kHz, a market data system at 1 MHz - which sets a per-tick budget in milliseconds. Operations are counted against that budget in microseconds, or in nanoseconds for tight inner loops.
Example. The simulator’s main loop targets 30 Hz, giving 33 ms per tick. A next_event system that touches 1,000,000 creatures has roughly 33 nanoseconds per creature; a single L3-resident memory load is around 10 ns. Three random pointer chases per creature blows the budget. The same algorithm with sequential SoA access fits comfortably.
Anti-pattern. Treating performance as something to “optimise later”. The layout decisions made early decide whether the program ever has a chance of meeting its budget; refactoring an OOP graph to SoA is a project, not a tweak.
See also. 1 (machine model), 7 (SoA), 11 (the tick), 27 (working set), 29-30 (scale walls).
5 - Identity is an integer
Definition. An entity is a small integer - usually a usize or a u32. It names a slot in the world’s tables, not a thing in itself. There is no entity object and no “where the entity lives”. An entity is one number, and that number is an index into every table that has something to say about it.
The strong form: sometimes you don’t even need that number. If the row’s own fields uniquely identify it - (suit, rank) for a playing card, (date, ticker) for a market quote - the identity is already in the data. A separate entity_id is then a surrogate key; before adding one, ask whether the data carries a natural key you can use directly. The card game can be played using (suit, rank) and no entity id at all. Variable-quantity tables (creatures, packets, sessions) usually have no natural key - two creatures can be identical - so a surrogate id is necessary, and nodes 9-10 follow.
Example. In the card-game milestone (after node 10), an entity is one of the indices 0..52. The card at index 17 has its suit at suits[17], its rank at ranks[17], and its current location - deck, hand, or discard - at locations[17]. Dealing a card means writing one cell in locations. There is no Card struct.
Anti-pattern. Treating the entity as a class instance with methods. The moment an entity has methods, the data is scattered across allocations, mutation is hidden behind setters, and the rest of the book’s economies - SoA, parallelism, persistence, replay - become impossible. Most students arriving in this book have written exactly this code before; the card game is where they first feel the alternative.
See also. 3 (Vec is a table), 6 (row is a tuple), 9 (sort breaks indices), 10 (stable IDs and generations).
6 - A row is a tuple
Definition. A coherent set of values that describe one entity travels together - but only if you keep them together. In ECS, “together” means at the same index in every component table that has something to say about that entity. Split a row across tables and you must keep the indices aligned; rearrange one without rearranging the others and you have corrupted the world.
Example. A creature at index 17 has its position at pos[17], its velocity at vel[17], its energy at energy[17], and its birth time at birth_t[17]. Together they are the row. There is no Creature struct holding all four; the row is implicit in the alignment.
Anti-pattern. Keeping a Vec<Creature> (AoS - Array of Structs). It works, but it sacrifices the layout reasoning of nodes 4 and 7: the inner loop reads all six fields whether it needs them or not, doubling cache pressure for systems that only touch position.
See also. 5 (id is integer), 7 (SoA), 23 (index maps), 25 (one writer, many readers).
7 - Structure of arrays (SoA)
Definition. Each field of a row gets its own Vec, indexed by entity. The row is reconstructed at access time by reading position i from each field’s vector. The opposite layout - Vec<Struct>, AoS - bundles the row’s fields into one contiguous record; SoA splits them. SoA is the default in this book because most systems read only a few fields, and SoA gives them sequential access to exactly those fields.
Example. The creature table is six Vecs - pos, vel, energy, birth_t, plus id and gen. The motion system reads only pos, vel, energy. With SoA those three vectors are sequentially scanned; AoS would force the loop to read all six fields whether it needs them or not.
Anti-pattern. Reaching for Vec<Creature> because “it’s neater”. Neatness is not a layout property. The cost is real and shows up at §1 onwards.
See also. 4 (cost & budget), 6 (row is a tuple), 26 (subscription tables), 31 (disjoint writes parallelize).
8 - Where there’s one, there’s many
Definition. Code is written for the array. The single-instance case is simply N=1; it does not need its own abstraction. A function that takes one entity and returns one result is a special case of a function over a Vec; write the array version first and the singleton drops out.
Example. “Update one creature’s position” is motion(&mut pos[i..i+1], &vel[i..i+1]). “Update all creatures” is motion(&mut pos, &vel). Same function, different slice. The card game illustrates the singularity case from the other side: a card game with 52 cards is three arrays - suit, rank, location - not 52 objects.
Anti-pattern. Writing Card::shuffle(&self) and then puzzling over how to shuffle a deck. The deck is three Vecs; shuffling is permuting an order vector; the per-card operation never appears.
See also. 3 (Vec is a table), 13 (system as function over tables), 31 (disjoint writes parallelize).
9 - The sort breaks indices
Definition. Rearranging the rows of a table - sorting, swap-removing, compacting - breaks any external reference that pointed at a slot. The card you held at index 17 is still there, but index 17 may now be a different card. The student must feel this pain before the next node makes sense.
Example. In §5’s exercise 10, player 1 holds card indices [3, 17, 21, 28, 41]. The dealer sorts the deck columns themselves by suit. Player 1’s hand is now wrong: index 17 used to be the 5♥, but is now the 4♣. The student observes the bug; they don’t fix it yet.
Anti-pattern. Saving an index across a reordering. The fix - coming next - is to save a stable id, not a slot index.
See also. 5 (id is integer), 10 (stable IDs and generations), 23 (index maps), 28 (proximity).
10 - Stable IDs and generations
Definition. A separate id column gives a name that survives sorting. A generation counter on top gives a name that survives recycling: when a slot is reused, its generation increments, so any reference holding the old (slot, gen) pair can detect that it is stale.
Example. In the §1 simulator, every creature carries id: u32 and gen: u32. A reference to creature (id=42, gen=3) survives sorting (the column is reordered, but the pair persists), and survives recycling (if slot 17 is freed and reused for a fresh creature, that fresh creature has gen=4, so the old gen=3 reference no longer matches).
Anti-pattern. Treating slot index as identity. This works until the first sort, after which it never works again. The stable-id pattern is the cheapest possible fix and is in your stdlib’s flavour everywhere - slotmap, ECS-engine handle types, database surrogate keys.
See also. 5 (id is integer), 9 (sort breaks indices), 23 (index maps), 24 (append-only & recycling).
11 - The tick
Definition. Programs run in discrete passes. State at the start of a tick is read; state at the end is written; nothing is half-updated mid-tick. The tick has two natural shapes: turn-based - the loop advances when an event arrives (a card game, a chess engine, a discrete-event simulator); and time-driven - the loop runs at a fixed rate (30 Hz, 1 kHz) with a per-tick budget.
Example. The card game is turn-based: a tick is “deal one card” or “play one move”. The §1 simulator is time-driven: a tick is one 33 ms step, during which all systems run in order. Both are tick loops; the difference is what drives the next pass.
Anti-pattern. Threading “real time” through the program as a global clock. The tick is the right unit because it makes determinism cheap (node 16) and bounds the work per pass.
See also. 4 (cost & budget), 12 (event time vs tick time), 13 (system as function), 14 (systems compose into a DAG).
12 - Event time is separate from tick time
Definition. The tick rate is how often the loop runs - typically a fixed number per second (30 Hz, 1 kHz). The event clock is the simulation’s internal time, which lives on the events themselves. A 30 Hz loop can resolve microsecond-precision events because the timestamp travels with the event, not with the loop.
Example. In the multi-agent track, 10,000 delivery drones each carry an arrival timestamp at their next stop. The loop runs at 30 Hz, but inside one tick the simulator may process events whose timestamps differ by four microseconds. The visualisation samples at tick rate; the underlying physics runs at event-clock resolution. The same pattern recurs in the multiplayer track, where rollback works only because event time is not tick time.
Anti-pattern. Conflating the two - usually expressed as “my model can only resolve dt = 1/30s because the loop runs at 30 Hz”. This is the most common confusion in physical simulation and event-driven systems work, and it imposes a false ceiling on the model’s time resolution. The fix is structural: put the timestamp on the data.
See also. 11 (the tick), 16 (determinism by order), 37 (the log is the world).
13 - A system is a function over tables
Definition. A system declares its inputs (read-set) and outputs (write-set). It has no hidden state. The signature is the contract. Every system takes one of three shapes: an operation (1→1, every input row produces one output), a filter (1→{0,1}, every input row produces zero or one), or an emission (1→N, every input row produces zero or more). These are the same shapes as familiar database operations - sort, groupby, filter, join, aggregate - over component arrays. Even observability is a system: inspect holds read references to other systems’ tables, instantiated only when transparency is needed; in production it is absent, not gated.
Example. motion is an operation: read (pos, vel), write pos. apply_eat is a filter: read pending eat events, output an updated energy and a removed food row. apply_reproduce is an emission: one parent input row, two offspring output rows. The simulator’s eight systems split cleanly into the three shapes.
Anti-pattern. A system that touches global state, mutates input parameters, or carries cross-tick state in a closure. None of these compose, none of these parallelize, and none of these can be tested without a fixture.
See also. 8 (one to many), 14 (systems compose into a DAG), 25 (one writer, many readers), 31 (disjoint writes parallelize).
14 - Systems compose into a DAG
Definition. The order of systems is given by who reads what who wrote. A system that reads a table must run after every system that writes that table within the tick. The program is a topological sort of this graph; choose the sort, and the program runs. Designing the system order is the same problem as designing a database query plan: each system is a stage, the DAG is the plan, and the program executes the plan.
Example. The §1 simulator’s tick DAG: food_spawn → motion → next_event → {apply_eat, apply_reproduce, apply_starve} → cleanup → inspect. Drawing this DAG is the first thing to do when adding a new system; the question “what do I read?” forces the right edges.
Anti-pattern. Calling systems in the order they were written in the file. This works for the first three systems; by the tenth, the read/write dependencies are tangled and one bad ordering corrupts state in ways that are hard to find.
See also. 13 (system as function), 25 (one writer, many readers), 34 (order is the contract), 31 (disjoint writes parallelize).
15 - State changes between ticks
Definition. Mutations buffer; the world transitions atomically at tick boundaries. Inside a tick, systems read consistent snapshots of their inputs and queue changes to their outputs. At the end of the tick, the queued changes are applied. This is the structural reason systems compose at all.
Example. When a creature dies in apply_starve, its id is appended to to_remove. The creature row is not yet gone; the rest of the tick’s systems still see it. After all systems complete, cleanup applies to_remove (and to_insert from apply_reproduce) in one sweep, and the next tick begins with the world in a consistent state.
Anti-pattern. Mutating the table inside a system pass. Either iteration breaks (because indices shift), or you serialise systems unnecessarily (because each must wait for the prior to commit). Buffering decouples the systems and gives you a natural place to log everything that changed - which is node 37’s punchline.
See also. 14 (systems compose into a DAG), 16 (determinism by order), 22 (mutations buffer), 37 (the log is the world).
16 - Determinism by order
Definition. Same inputs + same system order = same outputs. Reproducibility is structural, not a quality goal. It is what makes replay possible (you can rerun any tick from a snapshot), testing trustworthy (a property test can fix a seed), and the simulator’s regression test (the population graph) reliable.
Example. Two runs of the §1 simulator with the same seed and the same system order produce bit-identical population graphs. Reorder two systems with overlapping write-sets, and the runs diverge - which is exactly the bug that node 34 (“order is the contract”) is written to prevent.
Anti-pattern. Relying on ad-hoc randomness, system threads scheduled by the OS, or “good enough” reproducibility. These are fine for debugging but fatal for replay and for distributed extensions (see the monograph).
See also. 14 (systems compose into a DAG), 34 (order is the contract), 37 (the log is the world), 43 (tests are systems).
17 - Presence replaces flags
Definition. “Is hungry” is membership in a Hungry table, not a bool field on Creature. State is structural - a row exists or it does not - rather than a flag stored alongside other data. The change reads as small in code and turns out large in consequence: dispatch, parallelism, and persistence all simplify. Or in Fabian’s framing: instead of asking each room about its doors, ask the doors-table which doors belong to this room. The question is reversed; the lookup is reversed; the work shrinks.
Example. In the through-line simulator, a creature becomes hungry by having its slot inserted into the Hungry table. The system that drives hunger-related behaviour iterates Hungry directly, indexing the columns by slot; it does not scan Creatures checking a flag. The same pattern appears in ppdn’s daemon: is_admitted(peer) = established_contacts.contains_key(peer) - O(1), no I/O, no enum.
Anti-pattern. if creature.is_hungry { ... }. The flag forces every system that cares about hunger to filter the entire creature table; the table grows linearly with population whether or not anyone is hungry; and concurrent writes to the flag race against concurrent reads of unrelated fields in the same row.
See also. 13 (system as function over tables), 18 (add/remove = insert/delete), 19 (EBP dispatch), 20 (empty tables are free).
18 - Add/remove = insert/delete
Definition. A state transition is a structural move: insert a row in one table, remove a row from another. There is no setHungry(true). To make a creature hungry, you insert a row into Hungry; to make it stop being hungry, you remove the row.
Example. When a creature eats food in §1, apply_eat removes the food row (to_remove(food)) and updates the creature’s energy. There is no food.is_eaten = true flag - the food simply ceases to be in the table.
Anti-pattern. Tombstoning rows with is_alive = false or is_eaten = true flags. The flag forces every reader to filter the table; the table grows linearly with history; concurrent writes to the flag race against unrelated readers. Structural removal - actually taking the row out - is cheaper and clearer.
See also. 17 (presence replaces flags), 19 (EBP dispatch), 21 (swap_remove), 22 (mutations buffer).
19 - EBP dispatch
Definition. A system iterates over the table whose presence defines its applicability. There is no per-row branch checking “does this case apply to me”; if a row is in the table, the system runs on it.
Example. The “process all hungry creatures” system iterates the Hungry table directly. There is no for c in creatures: if c.is_hungry { ... }. The dispatcher is the table; iterating means processing. A useful intuition: it is the difference between a wandering shopper trying to remember what they need and a shopper with a list. The list version is shorter, faster, and correct by construction.
Anti-pattern. Iterating a master table and filtering inside the loop. Every row that fails the filter is wasted memory traffic; the inner loop’s working set is bloated by rows that do not matter to it.
See also. 13 (system as function), 17 (presence replaces flags), 18 (add/remove = insert/delete), 20 (empty tables are free).
20 - Empty tables are free
Definition. No rows means no work. A simulation with 90% inactive entities does no work for the inactive ones - the dispatcher never visits them.
Example. The §1 simulator may have 10,000 creatures and 9,000 of them are not hungry yet (their energy is full). The hunger system iterates Hungry (1,000 rows), not creature (10,000 rows). Cost scales with active rows, not with population.
Anti-pattern. Iterating the master table “just to be safe”. The 9,000 not-hungry creatures cost as much as the 1,000 hungry ones, and no number of branch hints fixes that.
See also. 17 (presence replaces flags), 18 (add/remove = insert/delete), 19 (EBP dispatch), 29 (10K-to-1M wall).
21 - swap_remove
Definition. Deletion in O(1) by moving the last row of a table into the deleted slot, then shrinking the table by one. Order is sacrificed for speed; the next two nodes fix the consequences. This and the rest of the Memory & lifecycle phase only matter for variable-quantity tables; constant-quantity tables like the 52-card deck need none of it.
Example. When a creature dies in §1, cleanup calls vec.swap_remove(slot) on each component vector. This is O(1) per vector, six vectors, so O(6) per dead creature. The cost is constant regardless of population.
Anti-pattern. vec.remove(slot), which shifts every later row left by one. For a one-million-creature table, removing 1000 dead creatures with remove is a billion memory moves; with swap_remove it is six thousand.
See also. 18 (add/remove = insert/delete), 22 (mutations buffer), 23 (index maps), 24 (append-only & recycling).
22 - Mutations buffer; cleanup is batched
Definition. Inserts and removes during a tick are not applied immediately; they are recorded as dirty markers in side tables (commonly to_insert and to_remove). At the tick boundary, a single sweep applies them all. Structural changes happen between passes, not during them.
Example. In the through-line simulator, when a creature dies its entity id is appended to to_remove. The system that detected the death does not call swap_remove on the position table - that would corrupt the iteration the system is in the middle of. After every system in the tick has run, a cleanup pass swaps-and-pops each id from every component table and clears the marker lists.
Anti-pattern. Mutating tables in place inside a system pass. Either the iteration breaks (because the indices it is using just got rearranged), or you allocate per mutation (because growing a Vec mid-loop forces reallocation). In a simulation with steady birth and death, the cost is O(N) reallocations per tick - orders of magnitude over what the budget allows.
See also. 15 (state changes between ticks), 18 (add/remove = insert/delete), 21 (swap_remove), 23 (index maps).
23 - Index maps
Definition. An index map is a parallel array from a key to a position, with a sentinel for “absent”. It appears twice. id_to_slot maps a stable entity to its current column slot, so a reference held as an id survives reordering; it is updated on every move - swap_remove, the spatial compaction, the buffered-cleanup sweep. A sparse set maps a slot to its position in a membership table’s dense list, giving O(1) membership-test and O(1) unsubscribe without a per-creature boolean. Both are O(1) lookups; neither scans.
Example. A player holds creature id 42. The creature columns get sorted for locality (node 28). id_to_slot is rewritten in lockstep, so id_to_slot[42] returns the new slot and the player’s reference still works; every slot-keyed membership table is reindexed through the same permutation in the same sweep.
Anti-pattern. Scanning the id column to find a row by id (O(N) per lookup), or keying membership with a per-creature bool flag - the very flag node 17 abolished. The sparse set gives O(1) membership without the flag.
See also. 5 (id is integer), 9 (sort breaks indices), 10 (stable IDs and generations), 17 (presence replaces flags), 26 (subscription tables), 28 (proximity).
24 - Append-only and recycling
Definition. Two strategies for slot reuse. Append-only tables grow forever; old slots stay valid forever. Recycling tables reuse vacated slots; the generation counter (node 10) prevents stale references. The choice is decided by access pattern: append-only is simpler but wastes memory under churn; recycling pays a small bookkeeping cost and bounds memory.
Example. The simulator’s eaten, born, dead logs are append-only - they record history and never delete. The creature table itself is recycling - slots are reused as creatures die and new ones are born. Two strategies, same simulator, different access patterns.
Anti-pattern. Always append-only “to keep things simple”. For a long-running simulator with steady churn, the table grows without bound and the working set blows the cache. Always recycling, conversely, breaks the history that node 37 wants to lean on.
See also. 10 (stable IDs and generations), 21 (swap_remove), 35 (boundary is the queue), 37 (the log is the world).
25 - One writer, many readers
Definition. Each table has exactly one writer. Many readers are fine. This is the rule that makes parallelism possible without locks, and it is the precondition for the inspection-system pattern: read-only access to all tables, no risk of races.
Example. In the §1 simulator, motion is the only writer of creature.pos. apply_eat is the only writer of food. cleanup is the only writer of the creature table’s structure (insertions and removals). When two systems have disjoint write-sets, they parallelize freely (node 31). The ownership rule is what makes the parallelization claim true.
Anti-pattern. Two systems writing the same field. This forces serialisation, locks, or atomics; whichever you pick, the system DAG (node 14) becomes a chain instead of a graph.
See also. 13 (system as function), 14 (systems DAG), 31 (disjoint writes parallelize), 40 (mechanism vs policy).
26 - Subscription tables, keyed by slot
Definition. A system that processes a subset of entities iterates a subscription table (the slots it cares about) and indexes the attribute columns directly, instead of scanning every entity and branching. The table is keyed by slot, not entity id, so the hot loop carries no id_to_slot redirection; cleanup reindexes the table when slots move. SoA does the orthogonal job - each field is its own column, so a loop never loads fields it does not read - while the subscription does the count job: touch only the entities that matter.
Example. Starvation reads only the hungry, reproduction only the well-fed. Each keeps a Vec<slot>: subscribe on the transition in, unsubscribe (swap_remove) on the transition out. The hot loop walks the table and gathers columns by slot.
Anti-pattern. A subscription that holds the whole population - a scan with extra bookkeeping; at full participation it is slower than a plain loop. Or keying the table by entity id, which pays a scattered id_to_slot cache miss per element, every tick.
See also. 7 (SoA), 17 (presence replaces flags), 19 (EBP dispatch), 23 (index maps), 28 (proximity).
27 - Working set vs cache
Definition. The size of the data the inner loop touches per pass decides speed more than the algorithm. If it fits in L1/L2, the loop is fast; if it does not, no algorithm saves you. This is what every other Scale-phase node serves: keeping the working set in cache.
Example. The §2 simulator’s motion loop reads px, py, vx, vy per creature. At 1,000,000 creatures × 16 bytes = 16 MB - bigger than L2, fits in L3. The loop is L3-bound. Reading only the columns it needs (SoA, node 7) and sorting for locality (node 28) keep the per-pass touch small and sequential. Motion touches every creature, so a subscription (node 26) does not help here; subscriptions pay for systems that process a subset.
Anti-pattern. Optimising the algorithm without measuring the working set. A 2× algorithmic speedup that doubles the working set is a slowdown.
See also. 1 (machine model), 4 (cost & budget), 7 (SoA), 28 (proximity).
28 - Proximity is a property of position
Definition. “Who is near here?” is a function of position, which the motion system already streams every tick. Compute each entity’s cell from its position and bin the entities with a counting sort - a dense structure recomputed each tick - rather than maintaining a bolt-on spatial index (quadtree, grid hash) that duplicates position and carries its own budget. Locality of the gather is the node 24/26 compaction, ordered by cell.
Example. The §2 simulator answers next_event’s creature-food encounter query by binning into cells and reading the 3x3 block around each creature. Measured at 1M, the dense bin beats a HashMap spatial index ~2.8x, and rebuilding the whole bin costs ~0.7% of the query it serves - so proximity is recomputed from the position stream each tick, not maintained. The pack-leader is the same idea for global coordination: one shared centroid, read by all, replaces all-pairs cohesion.
Anti-pattern. Reaching for a maintained spatial index because “you need one to find neighbours” - a second copy of position with insert/remove bookkeeping and pointer-chased buckets. Or all-pairs O(N²) coordination where one centroid or leader, read by every agent, is O(N).
See also. 7 (SoA), 24 (append-only & recycling), 26 (subscription tables), 27 (working set vs cache).
29 - The wall at 10K → 1M
Definition. What changes when allocations cannot be casual: pre-sized buffers, no per-frame heap traffic, swap_remove instead of remove, batched cleanup, consciously chosen layouts. The design budget from node 4 starts to bind. Code that worked at 10,000 stops working at 1,000,000 not because of complexity class, but because of constant factors.
Example. §1’s apply_reproduce calls to_insert.push(offspring) once per reproducing parent. At 10,000 creatures with 1% reproducing per tick, that is 100 pushes per tick - fine. At 1,000,000 with the same rate, it is 10,000 pushes per tick, and to_insert’s reallocations become visible. §2 pre-sizes to_insert to a typical batch capacity and the reallocations disappear.
Anti-pattern. Treating §1 code as ready for §2 scale without measurement. The wall is constant factor, not algorithm - profilers find it; intuition does not.
See also. 4 (cost & budget), 21 (swap_remove), 22 (mutations buffer), 30 (1M-to-streaming wall).
30 - The wall at 1M → streaming
Definition. What changes when the table no longer fits in main memory at all. Snapshots, sliding windows, log-orientation. The world becomes a window over the log; only the relevant slice is in memory at any one time.
Example. §3’s simulator may simulate a year of population history at 30 Hz - close to a billion ticks. The eaten, born, and dead logs alone are too big to keep in memory. The simulator writes them through to disk (a storage system, node 38) and re-reads windows on demand. The world becomes a function of the log over a time range.
Anti-pattern. Treating “doesn’t fit in memory” as a problem to solve with a bigger machine. The streaming pattern scales to anything the log itself can hold; a bigger machine just postpones the same redesign.
See also. 27 (working set vs cache), 35 (boundary is the queue), 37 (the log is the world), 38 (storage systems).
31 - Disjoint write-sets parallelize freely
Definition. Two systems that write to disjoint tables can run in parallel without coordination. No locks, no atomics. This is what node 25’s ownership rule buys: every table has one writer, so any two systems with non-overlapping writes are by construction race-free.
Example. In the §1 simulator, apply_eat writes food and creature.energy; apply_starve writes only creature removals via to_remove. Disjoint write-sets - they can run in parallel. Compare with motion and apply_eat, both writing creature.energy: those must serialize.
Anti-pattern. Locking individual rows to allow concurrent writers to share a table. This is correct but slow and complicated; partitioning the table by entity range (node 32) is usually the better answer.
See also. 13 (system as function), 25 (ownership), 32 (partition not lock), 34 (order is the contract).
32 - Partition, don’t lock
Definition. When one system must write a single table from multiple threads, split the table by entity range (or by spatial cell, or by hash) and give each thread its own slice to write. You partition the data, not the access. Each thread’s slice has a single writer; nodes 25 and 31 still hold within each slice.
Example. The §2 motion system writes creature.pos for a million creatures across 8 threads. Instead of locking, the loop is split: thread t writes slots t*N/8 .. (t+1)*N/8. No lock, no atomic, no contention.
Anti-pattern. A Mutex<Vec<T>> shared across threads. Even when correct, the lock serialises the write under contention; you have re-introduced the single-writer rule the long way around.
See also. 25 (ownership), 28 (proximity), 31 (disjoint writes), 33 (false sharing).
33 - False sharing
Definition. Two threads writing to different fields that happen to land in the same cache line slow each other down through hardware. The cache coherency protocol forces every write to invalidate the line on the other thread, even though the writes don’t conflict logically.
Example. Eight threads each accumulate a counter in counters: [u64; 8]. Naive layout puts all 8 counters in one cache line - the threads thrash the line. Padding each counter to its own cache line (or putting them in separate vectors) eliminates the contention.
Anti-pattern. Laying out per-thread state as adjacent bytes/words. Almost always a footgun. When in doubt, give each thread its own allocation, or pad to cache-line boundaries.
See also. 27 (working set vs cache), 31 (disjoint writes), 32 (partition, don’t lock).
34 - Order is the contract
Definition. Parallelism is allowed inside a step (between systems with disjoint writes), never across steps. Determinism (node 16) depends on this discipline. The system DAG (node 14) defines the permitted concurrency; anything outside the DAG is undefined behaviour.
Example. In the §1 simulator, apply_eat, apply_reproduce, and apply_starve may run in parallel because their writes are disjoint. They must all complete before cleanup starts. They must all run after next_event. The order is the contract; parallelism happens inside the contract, never around it.
Anti-pattern. “Optimising” by running systems out of DAG order because the test passed once. Determinism is a property of structure, not of testing.
See also. 14 (systems compose into a DAG), 16 (determinism by order), 31 (disjoint writes parallelize), 32 (partition not lock).
35 - The boundary is the queue
Definition. Events flow into the world on one queue, results flow out on another. Inside, the world is pure transformation - no I/O, no time, no environment. Everything that crosses the boundary goes through a storage system (node 38). The queue is the seam.
Example. The §1 simulator’s input queue carries food-spawn events from the food_spawner policy; the output queue carries eaten, born, dead events to the population log. The simulator’s tick reads the input queue, transforms the world, writes to the output queue. Nothing else crosses the boundary.
Anti-pattern. Sprinkling I/O calls inside systems. Logging from apply_eat, calling out to a metrics service from motion. Each one couples a system to the environment; each makes deterministic replay impossible.
See also. 13 (system as function), 36 (persistence is table serialization), 37 (the log is the world), 38 (storage systems).
36 - Persistence is table serialization
Definition. A snapshot is the world’s tables written as a stream of (entity, key, value) triples - the same shape the world has in memory. Recovery is reading them back. There is no separate “domain model” to map; serialisation is transposition, not translation.
Example. The simulator can write creature.pos, creature.vel, creature.energy etc. to a single file as one big triple stream. To recover, read the triples back into the in-memory Vecs. No ORM, no schema migration, no impedance mismatch - the file is the same shape as the memory.
Anti-pattern. Building a separate persistence layer with its own object model. The translation between the persistence object and the in-memory state is friction; every change to one requires a change to the other; a class of bugs lives in that translation forever.
See also. 7 (SoA), 35 (boundary is the queue), 37 (the log is the world), 38 (storage systems).
37 - The log is the world
Definition. An append-only log of events is the canonical state; the world’s tables are the log decoded into SoA. They share a structure - (rid, key, val) triples either way - so replaying the log builds the tables, and serialising the tables produces a log. The two are not analogues; they are two views of one thing.
Example. The code/logger crate stores rows as three parallel arrays: rids (which entity), keys (which table.column cell), vals (the value, as f64). On read, the triples are re-densified into per-field arrays plus presence masks - the canonical SoA-plus-EBP shape. Any simulation that logs every event automatically has a replayable history; recovery is not a separate code path, it is the read path.
Anti-pattern. Treating logs as ledger / audit records and the world as the “real” state, with translation code on each side. The translation is friction; it implies impedance mismatch where there is none. When the log and the world share a shape, they are interchangeable representations and can be converted by transposition rather than translation.
See also. 16 (determinism by order), 30 (1M-to-streaming wall), 36 (persistence is table serialization), 38 (storage systems), 43 (tests are systems).
38 - Storage systems: bandwidth and IOPS
Definition. A storage system is the part of the program that crosses I/O - to disk (HDD/SSD/NVMe), to network, to a service. Its limits are bandwidth (bytes per second) and IOPS (operations per second), and both must be counted against the tick budget from node 4. SQLite is one specimen; a TCP socket is another; a network filesystem is a third. The pattern - single owner, batched writes, asynchronous flush - is the same across all of them.
Example. The §3 streaming simulator’s storage system writes the eaten/born/dead logs to disk in batches of 50,000 rows at WAL-mode SQLite. At 30 Hz with batches per tick, that is roughly 1.5 million rows/second - well within an SSD’s IOPS budget. Compare with one row per INSERT: 30 Hz × thousands of events = a different order of magnitude on the IOPS counter.
Anti-pattern. Treating I/O as free at the call site. Every row written through a single-row INSERT is one IOP; budgets that ignore IOPS hit the floor without warning.
See also. 4 (cost & budget), 35 (boundary is the queue), 36 (persistence is table serialization), 37 (the log is the world).
39 - System of systems
Definition. Not all systems run every tick to completion. Some computations exceed the tick budget; some run on a different cadence; some live entirely outside the simulator. A system has a cadence - every tick, every N ticks, on a deadline, suspended-and-resumed across ticks, or out-of-loop entirely - and the cadence does not have to be one tick. Three patterns handle the cases that do not fit the simple model: anytime algorithms (return best-current answer when the deadline arrives), time-sliced computation (divide work across ticks, with progress as part of state), and out-of-loop computation (run on a separate thread or process, deliver results via the input queue).
Example. A path-finding system for a creature has a 5 ms budget per tick. A real path-finder may take much longer for a complex map. The anytime version returns its best partial path at 5 ms; the next tick refines it. A spatial search for the nearest task scans cells across multiple ticks, with cursor: usize tracking progress. A game AI evolving counter-strategy runs on a separate thread, reads a snapshot every few seconds, and delivers a strategy_update event into the simulator’s input queue. None of these break the trunk’s rules; each respects §4’s budget, §15’s state-as-progress framing, or §35’s queue boundary.
Anti-pattern. Forcing every computation into the per-tick model. A path-finder that blocks for 100 ms freezes a 30 Hz simulator for three ticks; a synchronous AI call to a remote service stalls the entire loop on network latency. Both bugs come from refusing to acknowledge that some work has its own cadence; the fix is structural, not algorithmic.
See also. 4 (cost & budget), 11 (the tick), 13 (system as function over tables), 15 (state changes between ticks), 35 (boundary is the queue).
40 - Mechanism vs policy
Definition. The kernel of a system exposes raw verbs. Rules - what is allowed, what triggers what - live at the edges, not in the kernel. Confusing the two is how systems calcify: a kernel that knows about a rule cannot drop the rule without rewriting itself.
Example. The simulator’s cleanup is mechanism: it applies whatever is in to_remove and to_insert, no opinions. The food_spawn system is policy: it decides when and where food appears, expressed as a set of rules over the food_spawner table. Replacing food_spawn with a different policy (a fixed schedule, an LLM, a player input) requires no change to cleanup.
Anti-pattern. Encoding policy decisions in the kernel - if hungry && food_nearby { eat }. Once the rule is in the kernel, every variant of the rule needs a new branch, and the kernel grows linearly with rule count.
See also. 13 (system as function), 25 (one writer, many readers), 35 (boundary is the queue), 41 (deferred abstraction).
41 - Deferred abstraction
Definition. Write the concrete case three times before extracting. Don’t pre-architect. The from-scratch version is also the dependency-pricing test (node 42): most crates lose the comparison because they generalise more than your case requires.
Example. A student building three small functions to filter creatures by hunger, by age, and by location is tempted to extract a generic filter_by taking a closure. Don’t - yet. The three concrete versions are easier to read and benchmark, and they expose what is actually shared. Once a fourth case shows up, the genuine abstraction emerges from the pattern of the four, not from imagined future needs.
Anti-pattern. Designing the abstraction before the third use. The early-extracted abstraction is invariably wrong by the time the fourth use appears, and the cost of changing it then is much higher than writing the third concrete version would have been.
See also. 13 (system as function), 40 (mechanism vs policy), 42 (you can only fix what you wrote).
42 - You can only fix what you wrote
Definition. Foreign libraries are allowed; this is not a prohibition. But every dependency is a bet that someone else will keep it working, and the bet has a cost: if the library is wrong, abandoned, or breaking-changed, you cannot fix it. You can only replace it, fork it, or live with it. The discipline is to take the bet consciously - knowing how much code the dependency saves and how much risk it carries.
Example. In the multicore track, the student is tempted to add rayon for the parallel-sum opening. The exercise asks them to first write the 50-line manual std::thread version, time it, then read rayon’s relevant source. Most students discover rayon does about 200 lines more than they need; some still adopt it. The difference is that they now know what they bet on.
Anti-pattern. Reaching for cargo add reflexively, by name recognition or because a tutorial used the crate. The dependency arrives with no measurement, no reading, and no appraisal of what its absence would have cost.
See also. 38 (storage systems), 41 (deferred abstraction), 43 (tests are systems).
43 - Tests are systems; TDD from day one
Definition. From the first exercise onward, every concept is approached test-first: what’s the smallest case? what’s the largest? what should the answer be for u8, for u32, for 10,000 agent ids? Tests are not a separate framework - they are systems that read tables and assert. A test rig is structurally identical to an inspection system. Property tests over component arrays and integration tests by replay log fall out of the structure rather than being a separate effort.
Example. §5’s first exercise - “build the deck” - has a test: after new_deck(), every (suit, rank) pair appears exactly once across the 52 rows. The test is a system: read suits and ranks; output an assertion result. The same shape is the InspectionSystem in ~/code/ppdn/SYSTEMS.md: read references to all tables, assertions in test mode, transparency in --debug mode, identical code path.
Anti-pattern. Testing as a separate concern bolted on at the end. The tests then live in their own world, mirroring the real code with mocks and stubs and a separate vocabulary. Testing systems-as-systems makes the tests grow with the code, not against it.
See also. 13 (system as function), 16 (determinism by order), 37 (the log is the world), 41 (deferred abstraction).
46 - The log survives power loss
Definition. Crash consistency: after any stop at any instant - power loss, kill -9, panic - the system recovers to a world that existed, never a half-written one. Three facts underlie it: a write is not atomic (it can tear mid-record), fsync is the barrier that makes a buffered write durable, and rename is the one atomic filesystem operation. From them follow a checksummed write-ahead log with a per-batch commit marker, batch fsync, atomic-rename snapshots, and idempotent replay. The commit marker doubles as the acknowledgement boundary - nothing downstream is told “done” before the marker is durable.
Example. The §22 cleanup batch is written, then a trailing marker (length + CRC). On restart, replay scans from the last snapshot and discards a trailing batch whose marker is missing or whose checksum fails; that batch “did not happen”. Snapshots are written temp-then-rename, so a crash mid-write leaves the previous snapshot whole.
Anti-pattern. Acknowledging a write before it is durable. A crash between the page cache and fsync loses data the sender believes was accepted - “paid” announced before the bank confirms.
See also. 16 (determinism by order), 22 (mutations buffer), 37 (the log is the world), 38 (storage systems).
47 - Observation is a read-only system
Definition. Observability is not bolted-on logging; it is a system in the §13 sense - a function whose read-set is the world and whose write-set is a small set of tables it alone owns. Two properties follow: it cannot perturb what it measures (a disjoint write-set leaves the world bit-identical, §31), and it must be cheap (a sequential column read plus a reduction, §7/§27) or it changes the timing it reports. Metrics, traces, structured logs, and alerting are that one shape pointed four ways.
Example. A metrics system reduces the world’s columns to one row per N ticks - population, mean energy, tick duration - and appends it to a metrics table, a time series in the same SoA shape. An alert is another read-only system whose read-set is that table; a trace is the §37 log filtered to one entity id.
Anti-pattern. print! on the hot path, and metrics shipped on a blocking send. The log is lossless because the world depends on it; metrics are lossy by choice - drop a sample, never stall a tick to emit one.
See also. 13 (system as function), 31 (disjoint write-sets parallelize), 35 (boundary is the queue), 37 (the log is the world).
48 - Reductions don’t parallelize freely
Definition. Disjoint write-sets parallelize freely (§31), but a reduction is the one place parallel work meets a single result, and there order leaks back in. Floating-point addition is not associative, so a parallel sum grouped by thread count gives different low bits per core count - same seed, different hardware, different world, the §16 contract broken. The fix is not to stop parallelising but to make the combine deterministic: a fixed reduction order (per-partition partials folded in id order), or integer/fixed-point accumulation (associative, exact).
Example. Summing a column across 4 vs 8 threads yields different bit patterns; fed back into the tick, one ULP amplifies into a different population. Reducing each partition into a fixed-id slot and folding the slots serially restores identical hashes across all core counts while keeping the parallel speedup. SIMD and GPU reductions reorder the same way and take the same fix.
Anti-pattern. A naive parallel float sum whose result feeds the simulation, with a world hash used for replay or distribution. It passes every test on one machine and diverges on a box with a different core count.
See also. 16 (determinism by order), 31 (disjoint write-sets parallelize), 33 (false sharing).
49 - The worst case is the only case
Definition. The trunk’s budgets (§4) and anytime algorithms (§39) are soft real-time: a missed deadline costs quality. Hard real-time is where a missed deadline is a fault, and there only the worst case counts, never the average. It demands worst-case execution time (WCET) analysis, no allocation or blocking call in the inner loop, bounded jitter (real-time scheduler, core isolation, locked pages), and priority inheritance. The data-oriented core already supplies most of the preconditions - no per-tick allocation, I/O off the hot path - but proving the worst case, and accepting that caches and speculation widen it, is a different discipline the book does not certify.
Example. An empty tick loop on a stock scheduler has a tight mean and a long jitter tail driven by the OS; pinning to an isolated core under SCHED_FIFO with mlockall shrinks the tail without changing the mean. A HashMap rehash or a hot-path Box::new is invisible in the average and a spike in the WCET.
Anti-pattern. Treating a fast average as a guarantee, and deploying a soft-real-time system where a hard one is required - a control loop, a safety interlock. The book builds soft real-time and says so; a certified controller is a different craft (RTOS, WCET tools, DO-178C / IEC 61508).
See also. 4 (cost and budget), 16 (determinism by order), 27 (working set vs cache), 39 (system of systems).
52 - Flattening a tree is compiling it
Definition. A recursive structure - an expression tree - can be stored three ways: a pointer tree (Box), a flat arena with u32 child indices, or a post-order list run on a value stack. Only the last pulls ahead, and not because it is flat but because it is read straight through; the arena buys nothing because its evaluator still hops in tree order. Writing a tree out as a run-it-straight list is compiling it - a stack machine / RPN bytecode - trading a cheap structural edit for a fast, repeatable traversal. The win is the access pattern, not the array, and it only appears once the tree outgrows cache.
Example. (x + 2) * 3 becomes the program x 2 + 3 *. Past cache the straight walk beats the pointer tree (about 1.25x at 131K nodes, ~1.9x at 2M); inside a cache-resident band of a few hundred nodes it loses (~0.85x). The edit-to-evaluate break-even is about one edit per four evaluations, and barely moves with tree size.
Anti-pattern. Assuming a flat layout is automatically faster - the index-arena is not - or compiling a tree whose shape changes more often than it is traversed, paying the O(N) re-linearisation for nothing.
See also. 3 (the Vec is a table), 14 (systems compose into a DAG), 27 (working set vs cache), 53 (staleness flows downhill).
53 - Staleness flows downhill
Definition. In a hierarchy, changing a node makes its world value and every descendant’s stale, and nothing else. Recompute everything as one flat top-down sweep, or recompute only the dirty subtree. Which wins is a crossover in the dirty fraction; a second axis matters more - recomputing the stale part pays only when it is packed (a contiguous subtree), so the recompute streams instead of hopping. A tree gives that packing for free, because every node has exactly one parent; a graph (52) takes it away.
Example. A jointed arm: swing the elbow and the hand follows, the shoulder does not. The flat sweep beats a pointer-tree walk 2.3x-2.8x; recompute-dirty wins ~900x at 0.1% dirty and only loses once most of the tree is dirty (past ~40-50% on the dev box, ~90% on slower-memory machines); a contiguous dirty subtree recomputes several times faster (~4-13x across machines) than the same node count scattered.
Anti-pattern. Recomputing a scattered dirty set (as slow as a full sweep, plus the bookkeeping), or carrying the incremental path when most of the tree changed - sweep instead.
See also. 24 (append-only and recycling), 28 (proximity is a property of position), 52 (flattening is compiling), 54 (a spreadsheet is a dependency graph).
54 - A spreadsheet is a dependency graph
Definition. When one cell feeds many, dependencies form a graph, not a tree, and “what went stale” is the transitive cone of an edit, recomputed in topological order (14). Three lessons follow: an aggregate is not incremental just because one input changed (a SUM re-reads the whole column); validation is cheaper than recomputation (stop propagating where a recomputed value did not change); and at scale the program flattens to one template per column, the data to disk, and the working set to a pegged tile - so out-of-memory cannot happen.
Example. Editing a below-maximum cell under a MAX feeding 100K dashboard cells recomputes 16 cells with the cutoff and 200K without (~54x). A billion-cell sheet is ~2 KB of templates, not ~160 GB of per-cell formula objects; a dirty-column disk patch reads a few hundred MB instead of the whole 36 GB file (~16 s down to ~0.1 s).
Anti-pattern. Following the cone blindly (no early cutoff); trusting a delta-maintained aggregate forever (it drifts, 55); holding one formula object per cell at scale.
See also. 14 (systems compose into a DAG), 22 (mutations buffer), 53 (staleness flows downhill), 55 (the same numbers, a different total).
55 - The same numbers, a different total
Definition. Floating-point addition is not associative - the order decides the sum - and no memory layout fixes it. A naive sequential sum over an ill-conditioned column can lose the entire answer; pairwise (tree) and compensated (Kahan/Neumaier) sums recover it, and the pairwise sum is also faster than the dependent naive chain. A delta-maintained running total drifts from a fresh recompute and never re-matches, worst in relative terms when the true total cancels. Correctness is orthogonal to layout: a perfectly columnar geometric predicate is still wrong on near-degenerate input.
Example. 1e16 + 1 + (-1e16) is 1 or 0 depending on order. A naive ledger sum reports ~0 where the truth was the accumulated small entries. A near-collinear orientation test in f64 gives the wrong sign ~99% of the time; computed exactly in i128 it is always right, at about the same cost.
Anti-pattern. acc += x over a real column and trusting the total; patching a sum by add-new/subtract-old forever; computing an orientation or in-circle predicate in f64 on large coordinates.
See also. 2 (numbers), 16 (determinism by order), 48 (reductions don’t parallelize freely), 54 (a spreadsheet is a dependency graph).
56 - The ceiling is bandwidth, not cores
Definition. A memory-bound pass - advance positions, two multiply-adds and ~24 bytes moved per element - runs at memory speed, not core speed. Adding cores stops helping once they saturate the single memory channel, so the way to go faster is to touch less data, not add compute. One box keeps a bounded active set current per frame; you reach for an accelerator only when that active set itself outgrows the box, never to brute-force away staleness an incremental design (53, 54) already avoids. For such a pass, shipping the data across the bus to a device and back costs more than doing it in place.
Example. The pass runs near 190 GB/s in cache and about 23 GB/s in main memory; across cores it plateaus near 2.2x at the channel limit. One core keeps ~32M elements current per 33 ms frame, all cores ~70M. For two flops per 24 bytes, a GPU offload’s round-trip is a bus-versus-memory trade: it costs more than the CPU pass where memory outruns the bus, less where it does not, and the durable rule is that offload pays only when the data is resident or arithmetic-heavy (a cost model; the reference machines have only integrated GPUs that share the channel, so a discrete-GPU run is an open invitation).
Anti-pattern. Adding cores or an accelerator to a bandwidth-bound elementwise pass; recomputing the whole world when only the active cone changed.
See also. 7 (structure of arrays), 27 (working set vs cache), 31 (disjoint writes parallelize), 53 (staleness flows downhill).
Through-line Simulator: A Simple Ecosystem
A specification for the simulator the book is written backwards from. It is the autobiography reference - every chapter either adds a feature to this simulator or asks a question only it can answer.
This is M2 in PLAN.md. The simulator must use every node in concepts/dag.md at least once before the book reaches it.
Premise
A 2D world populated by creatures, with food appearing from §1 onward. On each tick, creatures may:
- wander - take a step in a chosen direction; movement burns fuel,
- eat food they encounter - fuel tanks; the food row is removed,
- reproduce when their fuel is high - the parent fissions into two offspring, each carrying half the parent’s remaining fuel; the parent is consumed,
- starve when their fuel runs out - the creature row is removed.
A food-spawning policy at the edge of the world keeps the population from collapsing or exploding. The story of the simulator is a story of variable-quantity tables under closed-loop control - births, deaths, and the resulting need for swap_remove, dirty markers, generations, and log-orientation.
§0 is a stripped-down first version: 100 creatures wandering on a grid. No food, no fuel, no births and no deaths. Food, fuel, reproduction, and starvation all arrive together in §1.
|
|
Note - The shape - variable quantity under closed-loop control, with reproduction as a 1→N emission - comes from a different domain. The author was asked, twenty years ago, to simulate a sub-critical fissile assembly with active control rods. The OOP version was painful; the ECS version is much simpler. The book uses an ecosystem instead because every learner has the vocabulary for it; the shape is the same, including reproduction-as-fission. |
Why this through-line
- Universal vocabulary. Every learner has been taught ecology in school. No prior physics, finance, or networking knowledge required.
- Variable quantity is the default from §1. Population grows (reproduction) and shrinks (starvation) every tick. The book’s lifecycle machinery (
swap_remove, dirty markers, generations) is not introduced because the curriculum says so - it is introduced because the simulator stops working without it. - All three system shapes appear naturally. Motion is an operation (1→1). Eat and starve are filters (1→{0,1}). Reproduce is an emission (1→2 in §1, 1→{2,3} sampled in §2). Students meet all three before chapter 4.
- Discrete event clocks land cleanly. A creature’s next-eat, next-starve, and next-reproduce times carry arbitrary microsecond precision within a 30 Hz loop. The model resolves event time independently of loop rate - exactly the confusion node 12 is written to address.
- The log is the world. Every birth, death, and meal is one row in an append-only log. The world’s tables are the log decoded; replay reconstructs the population’s state.
- Control is policy at the boundary. The food-spawn rate is a separate system at the edge - mechanism-vs-policy made visible. The policy can change without touching the kernel.
- Visceral. Births and deaths are unambiguous. Students attend.
Scale spine
The simulator grows with the book. Each scale step adds features and forces a new set of techniques.
| Stage | Population | What appears at this stage | What it forces |
|---|---|---|---|
| §0 - toy | 100 | motion only on a 2D grid; no food, no fuel, no births, no deaths | identity & structure (nodes 1-10); constant-quantity tables; the card-game milestone applies |
| §1 - alive | 10,000 | food, fuel (burns in motion, tanks at food), reproduction (fission-style 1→2), starvation | variable-quantity arrives; swap_remove, dirty markers, lifecycle nodes earn their keep |
| §2 - crowded | 1,000,000 | sampled fission (1→{2,3}), spatial structure | hot/cold splits, working-set discipline, sort for locality |
| §3 - streaming | 100,000,000 | append-only history, sliding windows | log-orientation; the world becomes a window on the log |
Initial schema
Field types are indicative; the book may sharpen them as it goes. Some fields and tables appear only at later stages - noted in each row.
creature (constant in §0; variable-quantity from §1)
| field | type | from | notes |
|---|---|---|---|
id | u32 | §0 | surrogate key |
gen | u32 | §1 | generation counter (recycling arrives in §1) |
pos | f32×2 | §0 | (x, y) on the grid |
vel | f32×2 | §0 | direction × speed |
energy | f32 | §1 | fuel: tanks at food, burns in motion |
birth_t | f64 | §1 | μs since simulation start |
food (variable-quantity, from §1)
| field | type | notes |
|---|---|---|
id | u32 | |
pos | f32×2 | |
value | f32 | fuel yielded when eaten |
food_spawner (constant-quantity, from §1)
| field | type | notes |
|---|---|---|
id | u8 | |
region | f32×4 | bounding box |
rate | f32 | food per second |
pending_event (variable; rebuilt each tick; from §1)
| field | type | notes |
|---|---|---|
t | f64 | event timestamp |
kind | u8 | eat / reproduce / starve |
creature_id | u32 | |
target_id | u32 | food id for eat; unused otherwise |
Append-only logs (EBP and history; from §1)
eaten, born, dead - one row per event. These are simultaneously the world’s history and the input to replay.
Dirty markers (lifecycle, applied at tick boundary; from §1)
to_remove: Vec<u32> - creature ids slated for removal.
to_insert: Vec<CreatureRow> - fresh creatures from reproduction.
Population log (visualisation; from §0)
population: Vec<(t, count_creatures, count_food)> - one row per tick, written by inspect. The basis for the canonical population graph below.
Systems
| Name | Read-set | Write-set | Shape | From |
|---|---|---|---|---|
motion | creature.pos, creature.vel, creature.energy | creature.pos, creature.energy | operation | §0 (energy from §1) |
food_spawn | food_spawner, food | food | operation (policy) | §1 |
next_event | creature, food | pending_event | operation | §1 |
apply_eat | pending_event (kind=eat), food | to_remove(food), creature.energy, eaten | filter | §1 |
apply_reproduce | pending_event (kind=reproduce), creature | to_remove(parent), to_insert(offspring), born | emission (1→2 in §1; 1→{2,3} in §2) | §1 |
apply_starve | pending_event (kind=starve) | to_remove(creature), dead | filter | §1 |
cleanup | to_remove, to_insert | creature, food | meta | §1 |
inspect | all | population | debug-only | §0 |
System DAG (per tick, from §1):
food_spawn
└── motion
└── next_event
├── apply_eat
├── apply_reproduce
└── apply_starve
└── cleanup
└── inspect
In §0, only motion and inspect exist; inspect runs last and reads only.
Visualisation: the population graph
The canonical output of the simulator is a time-series plot of the population size. Every tick, inspect appends the current creature count (and food count, from §1) to the population log. After the run, the student plots that log as a line chart.
This is enough visualisation for every stage of the book. It is also one of the cleanest data-viz exercises available: the inspect system writes a tidy three-column table; the plot is a one-liner.
The population graph doubles as the simulator’s regression test: a stable closed-loop population is a passing run; a population that explodes or collapses is a failing run. Students who tune the food-spawn rate (a policy at the boundary) can watch the curve change in real time.
Other visualisations (a 2D heatmap of creature density, a real-time window) are optional and arrive later, if at all.
What this simulator is not
- A correct biology simulation. Fuel and food work like accounting balances, not metabolism. Geometry is a 2D box. No metabolism, no genetics, no learning, no behavioural variation.
- A teaching tool for ecology. Population dynamics will emerge, but they are not the focus.
- A game. There is no player.
The point is the shape. The simulator is the canonical case for every concept in the book - nothing more, nothing less.
Extensions for the enthusiastic student
Deliberately not in the main book. These are exercises for the student who wants to push further.
- Predators and prey. Add a
predatortable with its own motion, hunting, and reproduction. Trophic dynamics emerge. The student exercises every concept twice in the same simulator - once with herbivores, once with carnivores - which is the surest way to know they have understood, not memorised. - Sexual reproduction. Reproduction requires two creatures to meet. Emission becomes collision-mediated rather than threshold-mediated, exercising a different shape of the same node.
- Genetics. Each creature carries a small genome; offspring inherit with mutation. Selection often favours phenotypes the student did not intend. The result is usually surprising and educational.
- Policy-driven wandering. The motion system reads a per-creature policy table. Connects directly to the multi-agent track.
Resolved decisions
- §0 minimum schema. §0 has motion only - no food, no fuel, no lifecycle. Food, fuel, reproduction, and starvation all arrive together in §1.
- Reproduction trigger. Energy threshold (asexual). Movement burns fuel; reproduction consumes the parent and produces 2 offspring carrying half the parent’s remaining fuel each. This is the fission shape - one row in, multiple rows out, parent consumed. §2 generalises to a sampled 2-or-3.
- Visualisation. A time-series plot of population size, generated from the
inspectsystem’s per-tickpopulationlog. Doubles as the simulator’s regression test. - Energy. Fuel metaphor: tanks at food, burns in motion. Carried from §1 onward; absent from §0.